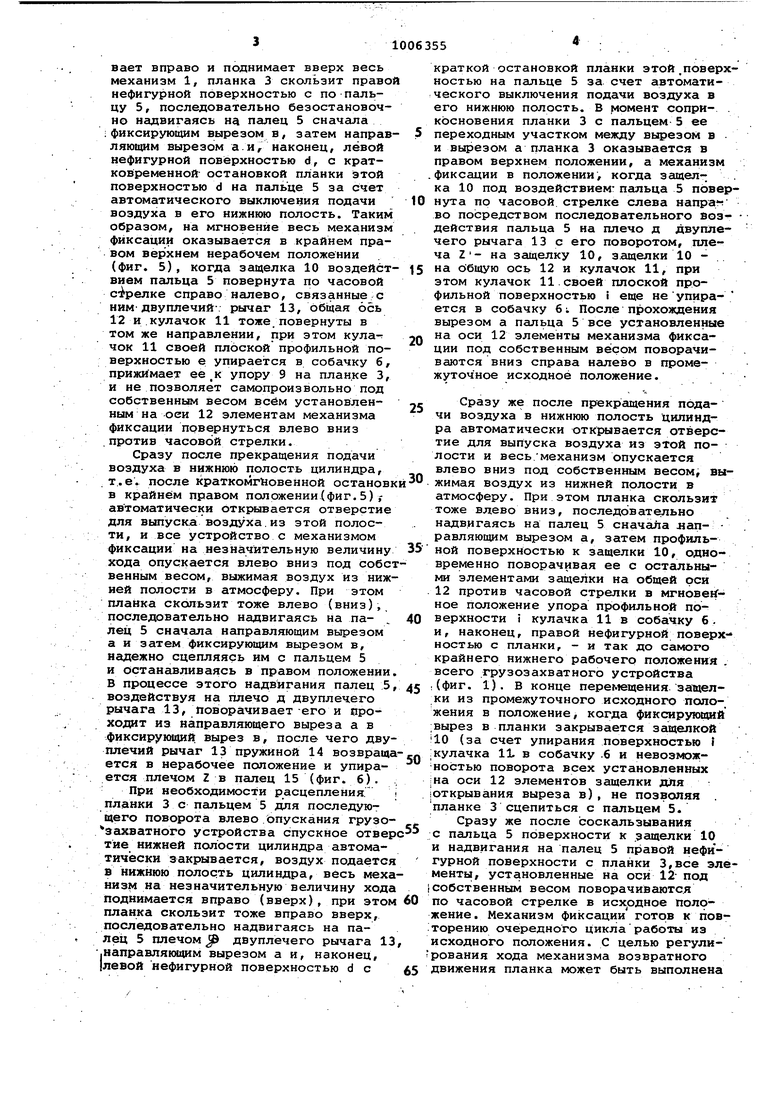
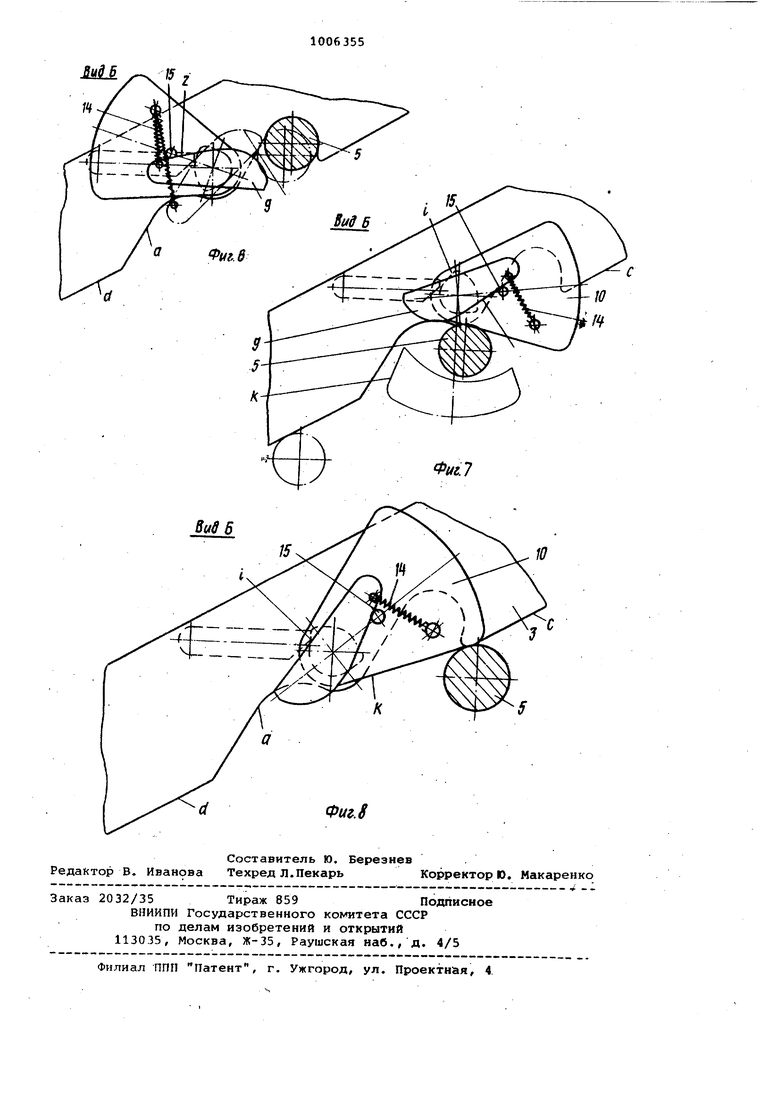
Изобретение относится к механиза ции и автоматизации процесса остановки и освобождения движения возвратных механизмов и может быть при менено для эксплуатации автоматичес ких rpy3O3axBaTHHXvустройств. Известен механизм фиксации элементов грузозахватного устройства, содержащий закрепленную на раме зах вата полую стойку со свободно поворотными на общей оси звездочкой и кулачком и перемещающийся относительно стойки ползун,.жестко прикре ленный к траверсе, при этом ползун состоит из,двух совмещенных и выполненных, как одно целое, пластину каждая из которых имеет фасонный сквозной вырез для взаимодействия соответственно со звездочкой и кулачком Ci3« Недостатком этого устройства является ненадежность его использования, сложность конструкции. : Известен механизм фиксации элементов грузозахватного устройства, содержащий жестко закрепленный на . .одном из элементов палец и шарнирно соединенную с другим элементом планку, имеющую вырезы для пальца, на которой закреплены посредством; оси защелка для перекрытия вырезов ограничитель поворота защелки С2 . Недостатком известного устройств является ненадежность его использов ния и ограниченна.я область применени а именно только в.клещевых захватах Целью изобретения является расширение функциональных возможностей .путем использования его .в различных грузозахватных устройствах. Указанная цель достигается тем, что механизм фиксации элементов грузозахватного устройства, содержащий жестко закрепленный на одном из элементов пгшец и шарнирно соединенную с другим элементом планку, имеющую вырезы для пальца, на которой закреплены посредством оси защелка для перекрытия вырезов и ограничитель поворота защелки, снабжен подпружиненным двуплечим рычагом, шарг нирно установленным на упомянутой оси со стороны защелки с возможность взаимодействия с вышеупомянутым пальцем, жестко закрепленным на упомянутой оси с противоположной стороны планки кулачком, и упорами, один КЗ которых закреплен на зещелке с возможностью взаимодействия с двупле чим рычагом, а второй - на планке, при этом ограничитель поворота защелки представляет собой подпружиненную собачку, шарнирно закрепленную на планке со стороны кулачка с возможностью взаимодействия с ним и со вторым упором. Такое выполнение механизма фиксации позволяет использовать его в различных грузозахватных устройст-1 вах. На фиг. 1 изображен механизм фиксации, смонтированный на грузозахватном устройстве, общий вид;; на фиг. 2 - разрез А-А на фиг. Л; на фиг. 3 - вид Б на фиг..2, исходное положение; на фиг. 4 - вид В на фиг. 2, исходное положение; на фиг. 5 - вид Б на фиг. 2, момент положения механизма фиксации в крайнем верхнем нерабочем положении; на фиг. 6 - вид Б на фиг. 2, момент фиксации элементов грузозахватного устройства; на фиг. 7 - вид Б на фиг. 2, момент выхода из фиксирующего положения; на фиг. 8 - вид Б на фиг. 2, момент перехода в исходное положение. Механизм фиксации элементов грузозахватного устройства, в данном случае рычажно-параллелограммного возвратно-поворотного механизма 1 с качающимся пневмоцилиндром 2 (в качестве привода), имеет планку 3, шарнирно соединенную с одним из элементов грузозахватного устройства рычагом 4, скользящую по пальцу 5 и имеющую направляющий а и фиксирующий в вырезы, собачку 6, связанную с пружиной 7 растяжения с планкой 3 и поворотную на неподвижной оси 8 до вставленного в планку упора 9, защелки 10 и кулачка 11, жестко насаженных на другой, общей поворотной оси 12 и свободно поворотного на оси 12 двуплечего рьгчага 13,. взаимодействующего с защелкой 10 посредством пружины 14 растяжения и вставленного в защелку 10 упора 15. При этом защелка 10, взаимодействуя с пальцем 5 при движении планки 3 сообщает вращательное движение через общую ось 12 кулачку 11, взаимодействующему с собачкой б, стопоря- ; щей в необходимые интервалц времени Вращение общей поворотной оси 12 против часовой стрелки. Двуплечий рычаг 13 взаимодействующего одним, то другимплечом с пальцем 5 и только одним плечом с зещелкой. 10, воздействуя на нее через упор 15. Работа механизма;фиксации происходит .следующим образом. Когда рычажно-параллелограммный механизм гру .зозахватного устройства находится в крайнем левом (ийжнем) положении (фиг. 1 - фиг, 4), то весь он свободно висит на шарнирах и фиксируется упиранием поршня пневмоцилиндра в нижнюю крьоику последнего, а механизм фиксации находится в исходном положении - вне контакта с пальцем 5. При подаче сжатого воздуха в нижнюю -полость (под поршень) качающегося пнёвмоцилиндра 2, шток 16, втягиваясь в полость цилиндра, поворачивает вправо и поднимает вверх весь механизм 1, планка 3 скользит право нефигурной поверхностью с по пальцу 5, последовательно безостановочно надвигаясь на палец 5 сначала :фиксирующим вырезом в, затем направ ляющим вырезом а.и, наконец, левой нефигурной поверхностью d, с кратковременной остановкой планки этой поверхностью d на пальце 5 за счет автоматического выключения подачи воздуха в его нижнкио полость. Такик образом, на мгновение весь механизм фиксации оказывается в крайнем правом верхнем нерабочем положении (фиг. 5), когда защелка 10 воздейст вием пальца 5 повернута по часовой С: релке справо налево, связанные ;С ним двуплечий- рычаг 13, общая ось 12 и кулачок 11 тоже.повернуты в том же направлении, при этом кулачок 11 своей плоской профильной поверхностью е упирается в собачку б прижимает ее,к упору 9 на планке 3 и не позволяет самопроизвольно под собственным весом всбм установленным на -оси 12 элементам механизма фиксации повернуться влево вниз .против часовой стрелки. Сразу после прекращения подачи воздуха в нижнюю полость цилиндра, т.е. после краткомгйовенной останов в крайнем правом положении (фиг. 5) ,автоматически открывается отверстие для выпуска воздуха.из этой полости, и все устройство с механизмом фиксации на незначительную величину хода опускается влево вниз под собс венным весом, выжимая воздух из ниж ней полости в атмосферу. При этом планка скользит тоже влево (вниз), последовательно надвигаясь на палец 5 сначала направляющим вырезом а и затем фиксирующим вырезом в, надежно сцепляясь им с пальцем 5 и останавливаясь в правом положении В процессе этого надвигания палец воздействуя на плечо д двуплечего рычага 13, поворачивает его и проходит из направляющего выреза а в фиксирующий вырез в, после чего дву плечий рычаг 13 пружиной 14 возвращ ется в нерабочее положение и упирается плечом Z в палец 15 (фиг. 6). При необходимости расцепления. планки 3 с пальцем 5 для последующего поворота влево опускания грузо захватного устройства спускное отве тйе нижней полости цилиндра автоматически закрывается, воздух подаетс в нижнюю полость цилиндра, весь мех низм на незначительную величину ход поднимается вправо (вверх), при это планка скользит тоже вправо вверх, последовательно надвигаясь на палец 5 плечом двуплечего рычага 1 .направляющим вырезом а и, наконец, {левой нефигурной поверхностью d с краткой остановкой планки этой,поверхностью на пальце 5 за счет автоматического выключения подачи воздуха в его нижнюю полость. В момент сопри- . косновения планки 3 с пальцем-5 ее переходным участком между вырезом в и вырезом а планка 3 оказывается в правом верхнем положении, а механизм : фиксации в положении, когда защел- . ка 10 под воздействием- пальца 5 повернута по часовой стрелке слева напраг во посредством последовательного воз- действия пальца 5 на плечо д двуплечего рычага 13 с его поворотом, плеча Z- на защелку 10, защелки 10 на общую ось 12 и кулачок 11, при этом кулачок 11.своей плоской профильной поверхностью i еще не упирается в собачку б: После прохождения вырезом а пальца 5 все установленные на оси 12 элементы механизма фиксации под собственным весом поворачиваются вниз справа налево в промежуточное исходное положение. Сразу же после прекращения подачи воздуха в нижнюю полость цилиндра автоматически открывается отверстие для выпуска воздуха из этой полости и весьмеханизм опускается влево вниз под собственным весом, выжимая воздух из нижней полости в атмосферу. При этом планка скользит тоже влево вниз, послед6вате:льно надвигаясь на палец 5 сначала лап- равляюи№1м вырезом а, затем профильной поверхностью к защелки 10, одновременно поворачивая ее с остальными элементами защелки на общей оси 12 против часовой стрелки в MrHOBetfное положение упора профильной поверхности i кулачка 11 в собачку 6. и, наконец, правой нефигурной поверхностью с планки, - и так до самого крайнего нижнего рабочего положения . всего грузозахватного устройства ;(фиг. 1). В конце перемещения защелки из промежуточного исходного положения в положение, когда фикструющий ;вырез в планки закрывается защелкой ilO (за счет упирания поверхностью I ; кулачка 11, в собачку .6 и невозможностью поворота всех установленных ;на оси 12 элементов защелки для Открывания выреза в), не позволяя . планке 3 сцепиться с пальцем 5. Сразу же после соскальзывания с пальца 5 поверхности к защелки 10 и надвигания на палец 5 правой нефигурной поверхности с планки 3,все элементы, установленные на оси 12 под Собственным весом поворачиваются по часовой стрелке в исходное положение. Механизм фиксации готов к повторению очередного цикла работы из исходного положения. С целью регулирования хода механизма возвратного движения планка может быть выполнена ИЗ двух частей,соединенных винтовьпи механизмом 17 (фиг. 1). Предлагаемый механизм фиксации элементов грузозахватного устройства используется в колесопрокатном производстве с цельюпериодической подачи эталона 18 дублирующего геометрические размеры колес на исходну позицию перед передачей его при помощи рольганга 19 в рабочую технологическую ЗОНУ пресса. Предлагаемая конструкция механизма фиксации может быть использована в любом грузозахватном механизме в отличие от и1звестного. BtfdB 12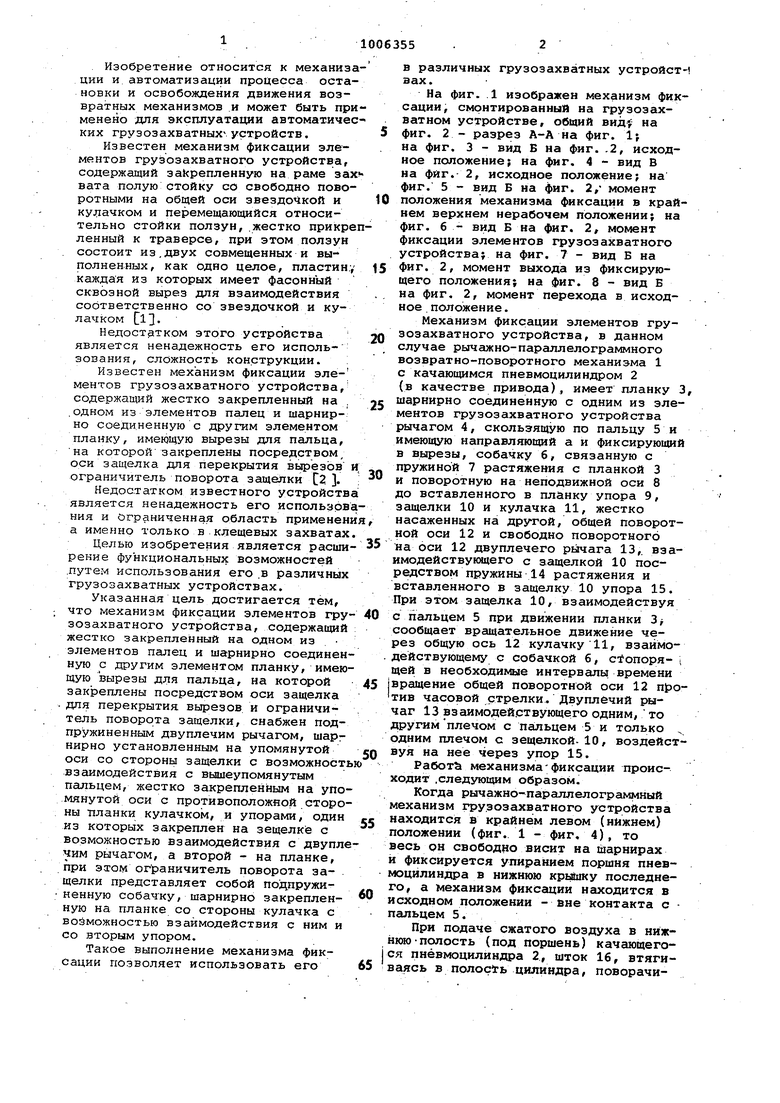

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват | 1981 |
|
SU1009963A1 |
| Широкозахватное почвообрабатывающее орудие | 1982 |
|
SU1042636A1 |
| Устройство для гибки деталей | 1985 |
|
SU1360849A2 |
| Замок для стропа | 1983 |
|
SU1197976A1 |
| Автоматическое устройство к грузозахватному органу | 1982 |
|
SU1093679A2 |
| Приспособление к прессам для автоматической толчковой подачи листового металла | 1933 |
|
SU32469A1 |
| УСТРОЙСТВО для ОБРЕЗКИ ниток | 1971 |
|
SU289627A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Устройство для управления группой исполнительных механизмов | 1986 |
|
SU1345180A1 |
| Фотоаппарат с автоматической фокусировкой объектива | 1988 |
|
SU1624393A1 |

МЕХАНИЗМ ФИКСАЦИИ ЭЛЕМЕН:ТОВ ГРУЗОЗАХВАТНОГО УСТРОЙСТВА, со., держащий жестко закрепленный на одГном из элементов палец и шарнирно .соединенную с другим элементом план.ку, имеющую вырезы для пальца, на которой закреплены посредством оси защелка для перекрытия вырезов и ограничитель поворота защелки, отличающийся тем, что, с целью расширения функциональных возможностей путем использования его в различных грузозахватных устройствах, он снабжен подпружиненным двуплечим рычагом, шарнирно- установленным на упомянутой оси со-стороны защелки с возможностью взаимодействия с вышеупомянутым пальцем, жестко закрегглен-;,; ным на упомянутой оси с противоположной стороны планки кулачком, и .упорами, один из которых закреплен на защелке с возможностью взаимодействия с двуплечим рычагом, а второй- на планке, при этом ограничитель по- Щ ворота защелки представляет собой подпружиненную собачку, шарнирно закрепленную на планке со стороны I кулачка с возможностью взаимоа1ейст ВИЯ с ним и со вторым упором.
