1
Изобретение относи-; „я к вычислительной технике и автоматике и может использоваться при автоматизации производствеииых процессов с помощью промышленных роботов, цри исследовании с помощью автоматических систем морей и океаиов и ориентировании на космических объектах.
Известны устройства для управления адаптивным роботом, содержащие блок управления сканированием, блок памяти, переключатель режима работы, первый выход которого связан с иервым входом блока сравнения, соединенного через блок управления движеиием с приводами манипулятора.
Недостатком даиных устройств является низкая точность создаваемых моделей (объемных изображений предметов), которая существенно зависит от общей освещенности предмета, его формы, местоположений источников света, наличия непредусмотренных теней на исследуемом иредмете от окружающих объектов. Это увеличивает вероятность ошибок при распознавании и определении параметров иоложения предметов. Исключительная сложность обработки изображений требует большого времени на создание модели объекта, на распознавание и определение параметров его положения и привод к общей высокой сложности устройства адаптации.
Цель изобретения - повышение надежности работы устройства и его упрощение.
Это достигается тем, что устройство содержит каналы формирования изображений объекта, каждый из которых включает последовательио соединенные датчик дальности, блок
вычисления высот точек поверхности объекта относительно фиксированной плоскости и блок вычисления координат проекций точек поверхности объекта на фиксированную плоскость, вход дальности которого соединен с выходом датчика дальности, блок формирования матрицы высот точек поверхности объекта относительно фиксированной плоскости, координатные входы которого соединены с выходами блоков вычисления координат проекций точек поверхности объекта на фиксированную плоскость каждого канала формирования изображений объекта, а входы высот - с выходами блоков вычисления высот точек поверхности объекта относительно фиксированной плоскости каждого канала формирования изображений объекта, н последовательно соединенные блок вычисления координат центра тяжестн, вход которого связан с выходом блока формирования матрицы высот
точек поверхности объекта относительно фиксированной плоскости, блок определения параметров изображения, инвариантных к поворотам объекта относительно центра тяжести, I блок минимизац 1и параметров. Выход блока мииимизации параметров подключен к влоду переключателя режимов работы, второй выход которого связан с входом блока блока памяти, соединенного с вторым входом блока сравнения. Блок управления сканированием соединен с входами сканирования датчика дальности, блока вычисления высот точек поверхности объекта относительно фиксированной плоскости и блока вычисления координат проекций точек поверхности объекта на фиксированную плоскость каладого канала формирования изображений объекта.
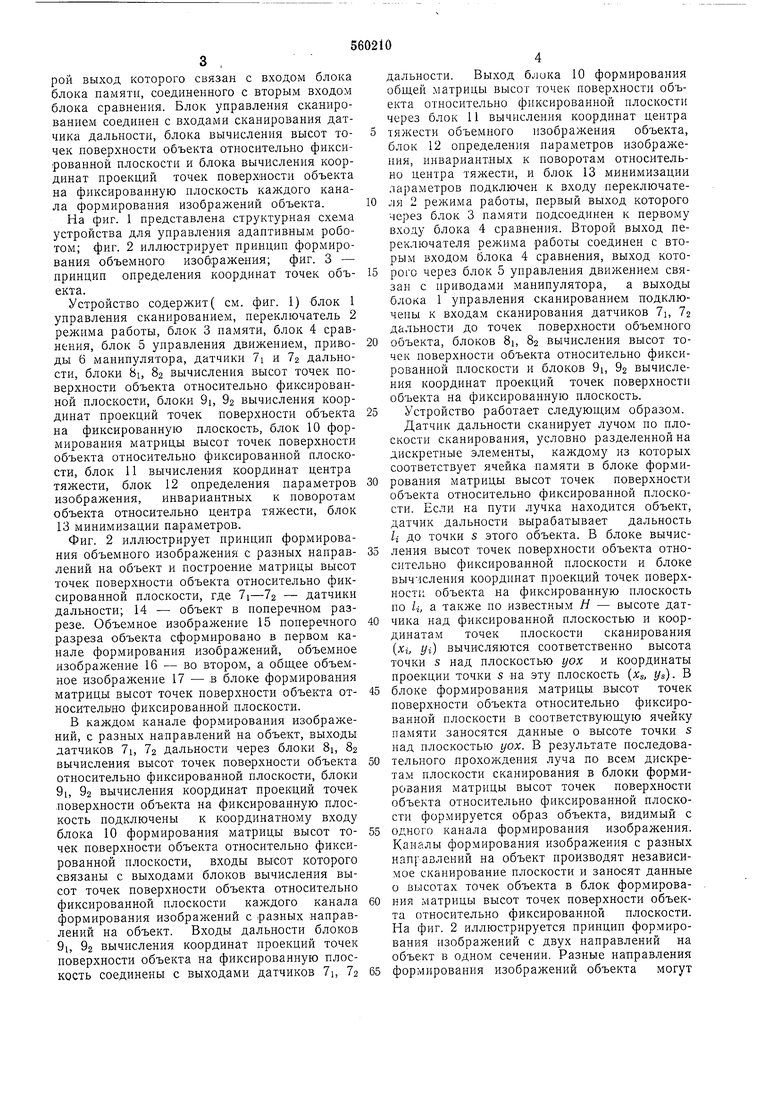
На фиг. 1 представлена структурная схема устройства для управления адаптивным роботом; фиг. 2 иллюстрирует принцип формирования объемного изображения; фиг. 3 - принцип определения координат точек объекта.
Устройство содержит( см. фиг. 1) блок 1 управления сканированием, переключатель 2 режима работы, блок 3 па.мяти, блок 4 сравнения, блок 5 управления движением, приводы 6 манипулятора, датчики 7i и дальности, блоки 8i, 82 вычисления высот точек поверхности объекта относительно фиксированной плоскости, блоки 9i, 92 вычисления координат проекций точек поверхности объекта на фиксированную плоскость, блок 10 формирования матрицы высот точек поверхности объекта относительно фиксированной плоскости, блок 11 вычисления координат центра тяжести, блок 12 определения параметров изображения, инвариантных к поворотам объекта относительно центра тяжести, блок 13 минимизации параметров.
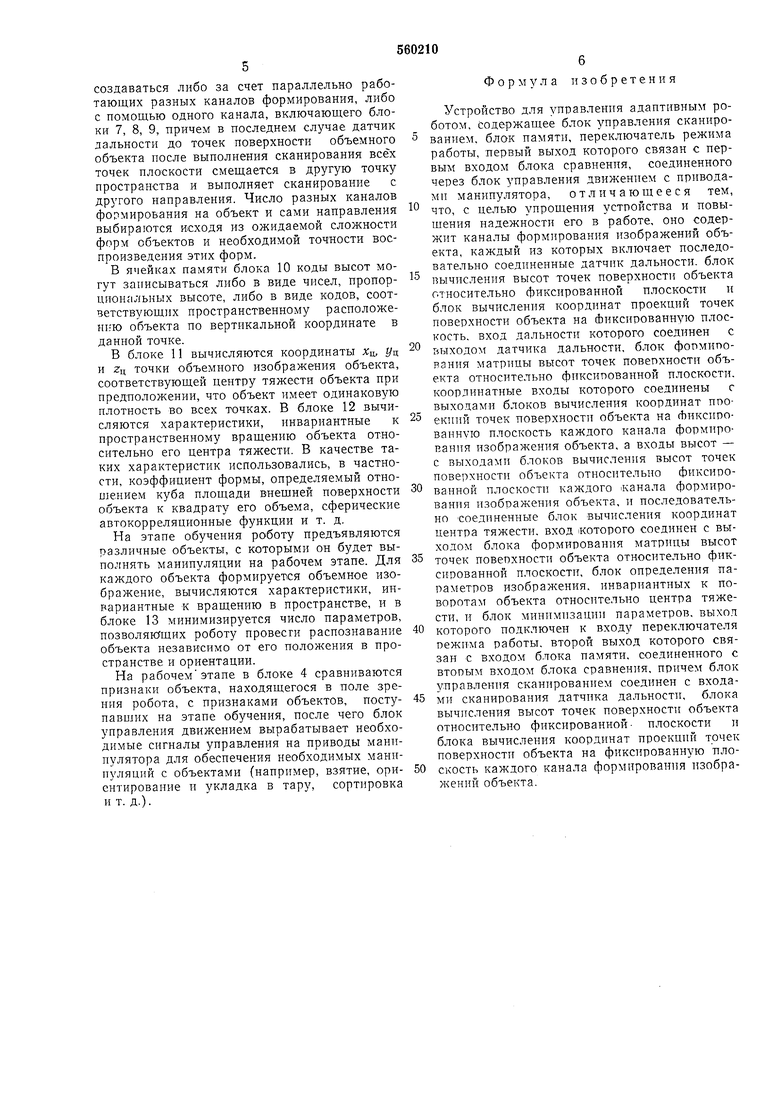
Фиг. 2 иллюстрирует принцип формирования объемного изображения с разных направлений на объект и построение матрицы высот точек поверхности объекта относительно фиксированной плоскости, где - датчики дальности; 14 - объект в поперечном разрезе. Объемное изображение 15 поперечного разреза объекта сформировано в первом канале формирования изображений, объемное изображение 16 - во втором, а общее объемное изображение 17 - ,в блоке формирования матрицы высот точек поверхности объекта относительно фиксированной плоскости.
В каждом канале формирования изображений, с разных направлений на объект, выходы датчиков , TS дальности через блоки 8i, 82 вычисления высот точек поверхности объекта относительно фиксированной плоскости, блоки 9ь 92 вычисления координат проекций точек .поверхности объекта на фиксированную плоскость подключены к координатному входу блока 10 формирования матрицы высот точек поверхности объекта относительно фиксированной плоскости, входы выСот которого связаны с выходами блоков вычисления высот точек поверхности объекта относительно фиксированной плоскости каждого канала формирования изображений с разных направлений на объект. Входы дальности блоков 9i, 92 вычисления координат проекций точек поверхности объекта на фиксированную плоскость соединены с выходами датчиков 1, 1г
дальности. Выход блока 10 формирования общей матрицы высот точек поверхности объекта относительно фиксированной плоскости через блок И вычисления координат центра тяжести объемного изображения объекта, блок 12 определения параметров изображения, инвариантных к поворотам относительно центра тяжести, и блок 13 минимизации параметров подключен к входу переключателя 2 режима работы, первый выход которого через блок 3 памяти подсоединен к первому входу блока 4 сравнения. Второй выход переключателя режима работы соединен с вторым входом блока 4 сравнения, выход которого через блок 5 управления движением связан с приводами манипулятора, а выходы блока 1 управления сканированием подключены к входам сканирования датчиков 1, 1 дальности до точек поверхности объемного объекта, блоков 8i, 82 вычисления высот точек поверхности объекта относительно фиксированной плоскости и блоков 9i, 92 вычисления координат проекций точек поверхности объекта на фиксированную плоскость.
Устройство работает следующим образом.
Датчик дальности сканирует лучом по плоскости сканирования, условно разделенной на дискретные элементы, каждому из которых соответствует ячейка памяти в блоке формирования матрицы высот точек поверхности объекта относительно фиксированной плоскости. Если на пути лучка находится объект, датчик дальности вырабатывает дальность li до точки S этого объекта. В блоке вычисления высот точек поверхности объекта относительно фиксированной плоскости и блоке выччсления координат проекций точек поверхности объекта на фиксированную плоскость по li, а также по известным Н - высоте датчика над фиксированной плоскостью и координатам точек плоскости сканирования (Xi, г/г) вычисляются соответственно высота точки S над плоскостью уох и координаты проекции точки s на эту плоскость (Xs, ys). В блоке формирования матрицы высот точек поверхности объекта относительно фиксированной плоскости в соответствующую ячейку памяти заносятся данные о высоте точки s над плоскостью уох. В результате носледовательного прохождения луча по всем дискретам плоскости сканирования в блоки формирования матрицы высот точек поверхности объекта относительно фиксированной плоскости формируется образ объекта, видимый с одного канала формирования изображения. Каналы формирования изображения с разных направлений на объект производят независимое сканирование плоскости и заносят данные о высотах точек объекта в блок формирования матрицы высот точек поверхности объекта относительно фиксированной плоскости. На фиг. 2 иллюстрируется принцип формирования изображений с двух направлений на объект в одном сечении. Разные направления формирования изображений объекта могут создаваться либо за счет параллельно работающих разных каналов формирования, либо с номощью одного канала, включающего блоки 7, 8, 9, причем в последнем случае датчик дальности до точек поверхности объемного объекта после выполнения сканирования всех точек плоскости смещается в другую точку пространства и выполняет сканирование с другого направления. Число разных каналов формирования на объект и сами направления выбираются исходя из ожидаемой сложности форм объектов и необходимой точности воспроизведения этих форм. В ячейках памяти блока 10 коды высот могут записываться либо в виде чисел, пропорциональных высоте, либо в виде кодов, соответствующих пространственному расположению объекта по вертикальной координате в данной точке. В блоке 11 вычисляются координаты Хц, г/ц и 2ц точки объемного изображения объекта, соответствующей центру тяжести объекта при предположении, что объект имеет одинаковую плотность во всех точках. В блоке 12 вычисляются характеристики, инвариантные к пространственному вращению объекта относительно его центра тяжести. В качестве таких характеристик использовались, в частности, коэффициент формы, определяемый отношением куба площади внешней поверхности объекта к квадрату его объема, сферические автокорреляционные функции и т. д. На этапе обучения роботу предъявляются различные объекты, с которыми он будет выполнять манипуляции на рабочем этане. Для каждого объекта формируется объемное изображение, вычисляются характеристики, инвариантные к вращению в пространстве, и в блоке 13 минимизируется число параметров, позволяющих роботу провесги распознавание объекта независимо от его положения в пространстве и ориентации. На рабочемэтапе в блоке 4 сравниваются признаки объекта, находящегося в поле зрения робота, с признаками объектов, поступавших на этапе обучения, после чего блок управления движением вырабатывает необходимые сигналы управления на приводы манипулятора для обеснечения необходимых манипуляций с объектами (нанример, взятие, ориентирование и укладка в тару, сортировка и т. д.). Формула изобретения Устройство для управления адаптивным роботом, содержащее блок управления сканированием, блок памяти, переключатель режима работы, первый выход которого связан с первым входом блока сравнения, соединенного через блок управления движением с приводаAUI манипулятора, отличающееся тем, что, с целью упрощения устройства и повышения надежности его в работе, оно содержит каналы формирования изображений объекта, каждый из которых включает последовательно соединенные датчик дальности, блок вычисления высот точек поверхности объекта относительно фиксированной плоскости и блок вычисления координат проекций точек поверхности объекта на Фиксированную плоскость, вход дальности которого соединен с выходом датчика дальности, блок фопмипования матрицы высот точек поверхности объекта относительно фиксированной плоскости, координатные входы которого соединены с выходамн блоков вычисления координат ПРОекпий точек поверхности объекта на Лнксированную плоскость каждого канала формирования изображения объекта, а входы высот - с выходами блоков вычисления высот точек поверхности объекта относительно фнксированной плоскости каждого .канала формирования изображения объекта, и последовательно Соединенные блок вычисления координат центра тяжестн, вход которого соединен с выходом блока формирования матрицы высот точек поверхности объекта относительно фиксированной плоскости, блок определения параметров изображения, инварнантных к поворотам объекта относительно центра тяжестн, и блок минимизации параметров, выход которого подключен к входу переключателя режима работы, второй выход которого связан с входом блока памяти, соединенного с ВТОРЫМ входом блока сравнения, причем блок управления сканированием соединен с входами сканирования датчика дальности, блока вычисления высот точек новерхности объекта относительно фиксированной- нлоскости и блока вычисления координат проекций точек поверхности объекта на фиксированную ллоскость каждого канала формирования изображений объекта.

,/77Xrv / / /
/ / /77
bS5;
гтггт
/7;
г
н
Z
Фиг.З
