(54) МЕХАНИЗМ ШАГОВОГО ПЕРЕМЕЩЕНИЯ
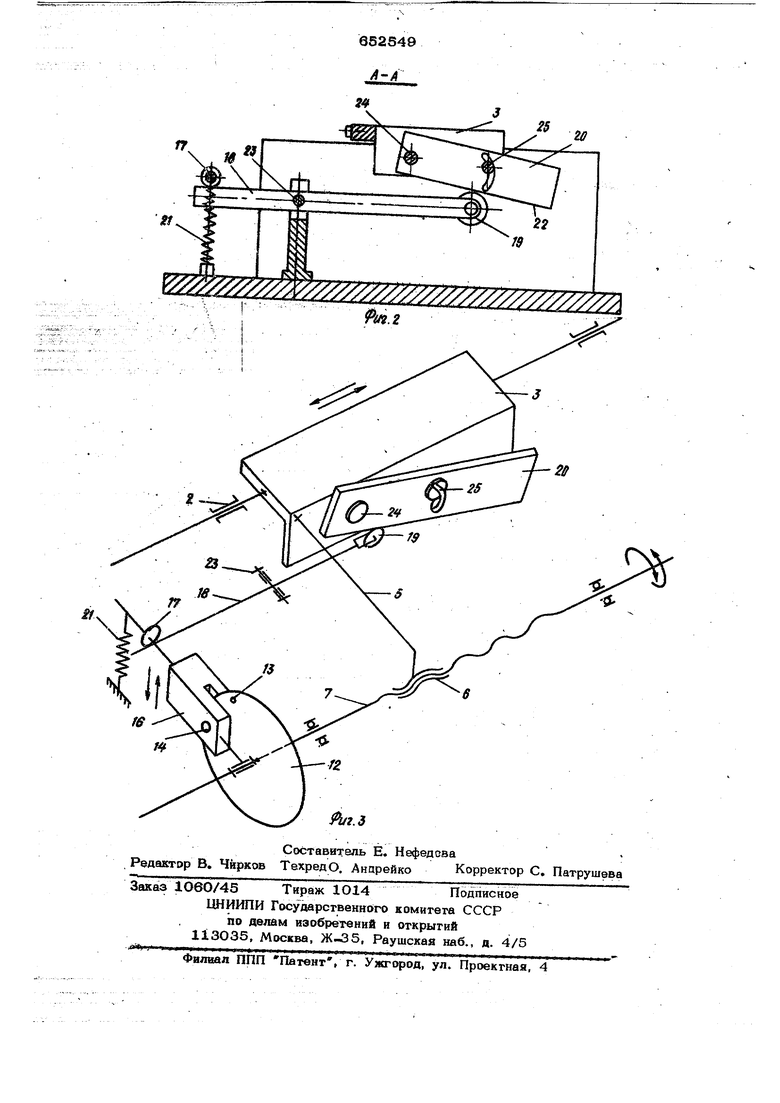
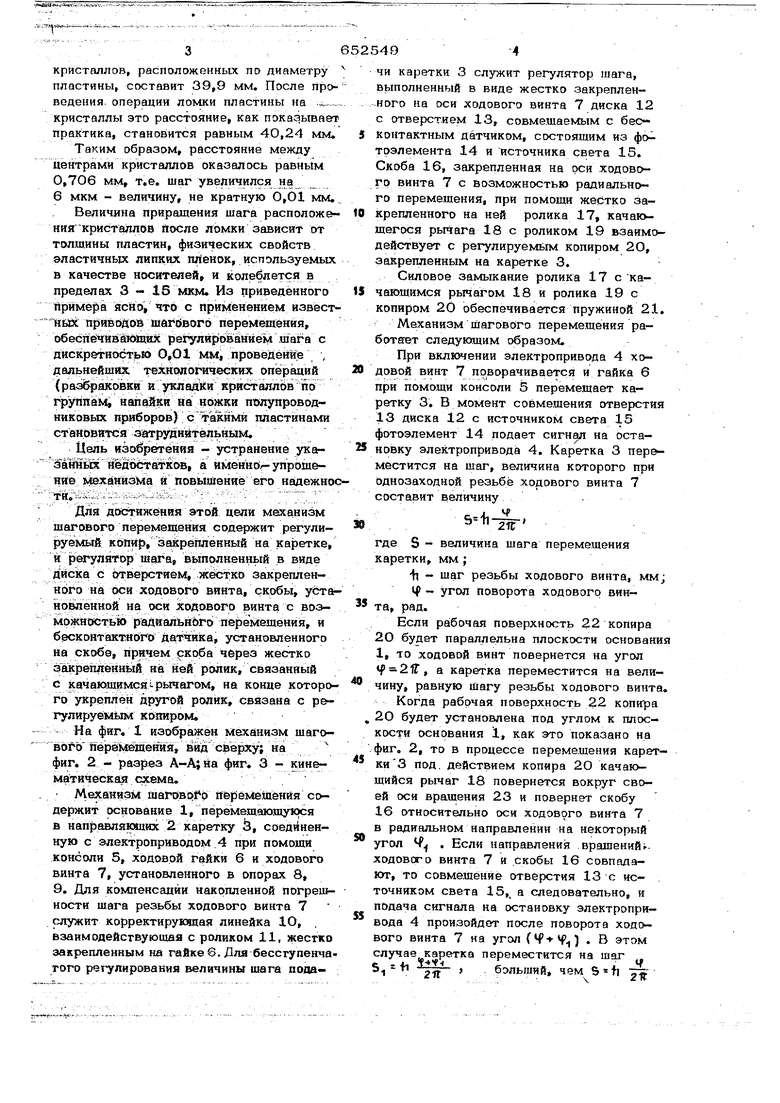
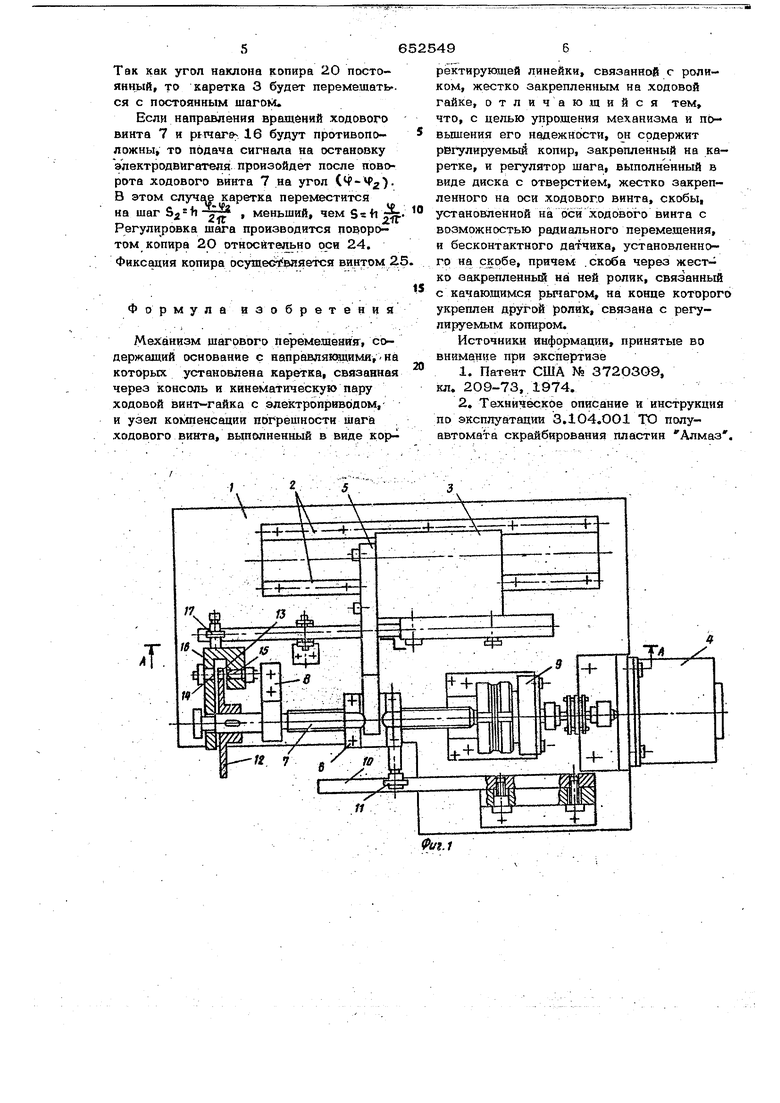
652549 кристаллов, расположенных по диаметру пластины, составит 39,9 мм. После про ведения, операции ломки пластины на ,кристаллы это расстояние, как показывае практика, становится равным 40,24 мм Таким образом, расстояние между центрами кристаллов оказалось равным 0,706 мм т,е. шаг увеличился на 6 мкм - величину, не кратную 0,01 мм Величина приращения шага расположе ния кристаллов йосле ломки зависит от толщины пластин, физических свойств эластичных липких пленок, используемых в качестве носителей, и колеблется в пределах 3 - 15 мкм. Из приведенного йрймёра йен о, что с применением извёст нш прйвойой шагбвого перемещения, обеспёчйвШкяциЗс регулированием щага с дискретност|ью О,О1 мм, проведение дальнейших техноногич1аских операций (разёраковкй и укладКи кристаллЬв по группак напайки на ножки полупроводниковых нриборов) с Уакими пластинами становится затруднительным. Цель изобретения - устранение указанных HefltxrraTKOB, а именно упрощение механизма я повышение его надежно ти, -«- . Для достижения этой цели механизм шагового перемеШения содержит регулируемый копи{), закрепленный на каретке, и регулятор шага, В1 шолненнь1й в виде дйс1ка с отверстием, жёстко закрепленного на оси ходового винта, скобы, уста но енной на сюи ходового винта с возMpkHOCTtH) радаалЪнЬго перемещения, и бесконт)актногб датчика, установленного на скобе, причем скоба через жестко закреплённый на ней ролик, связанный с качающимся рычагом, на конце которо го укреплен другой ролик, связана с регулируемым кояиром, - На фиг, 1 изображен механизм шагоBbfo ШремеШения, вид сверхУ; на фиг. 2 - разрез А-А; на фиг 3 - кинематическая схема. Механизм aiaroBof р Перемещения содержит рснование 1, перемещающуюся в направляющих 2 каретку И, соединенную с электроприводом 4 при помощи консоли 5, ходовой гайки 6 и ходового винта 7, установленного в опорах 8, 9. Для компенсации накопленной погреш ности шага резьбы ходового винта 7 служит корректирукяцая линейка 1О, , взаимодействующая с роликом 11, жестко закрепленным на гайкеб. Для бессгупенча того регулирования величины шага пооачи каретки 3 служит регулятор шага, выполненный в виде жестко закрепленного на оси ходового винта 7 диска 12 с отверстием 13, совмещаемым с бес контактным датчиком, состоящим из фотрэлемента 14 и источника света 15. Скоба 16, закрепленная на реи ходовогр винта 7 с возможностью радиального перемещения, при помощи жестко закрепленного на ней ролика 17, качающегося рычага 18 с роликом 19 взаимодействует с регулируемым копиром 20, закрепленным на каретке 3. Силовое замыкание ролика 17 с качающимся рычагом 18 и ролика 19 с копиром 20 обеспечивается пружиной 21. Механизм шагРвРго перемещения работает следующим образом. При включении электропривода 4 ходовой винт 7 поворачивается и гайка 6 при помощи консоли 5 перемещает каретку 3. В момент совмещения отверстия 13 диска 12 с источником света 15 фотоэлемент 14 подает сигнал на остановку электропривода 4. Каретка 3 переместится на шаг, величина которого при рднозаходной резьбе ходового винта 7 составит величину , где S - величина шага перемещения каретки, мм; h - шаг резьбы ходового винта, мм; Ч угол Поворота ходовогр винта, рад. Если рабочая поверхность 22 копира 20 будет параллельна плоскости основания 1, то ходовой винт повернется на угол f 2ir, а каретка переместится на величину, равную Шагу резьбы ходового винта. Когда рабрчая поверхность 22 копира 20 будет установлена под углом к плоскости основания 1, как это показано на фиг. 2, то в процессе перемещения каретки3 под. действием копира 2О качающийся рычаг 18 повернется вокруг своей оси вращения 23 и повернет скобу 16 относительно оси ходового винта 7 в радиальном направлении на некоторый угол Ч . Если направления вращений., ходового винта 7 и скобы 16 совпадают, то совмещение отверстия 13 с источником света 15, а следовательно, и подача сигнала на остановку электропривода 4 произойдет после поворота ходового винта 7 на угол ) . В этом случав каретка переместится на шаг 5 +1 2Я больший, чем Sfi как угол наклона копира 20 постоянный, то каретка 3 будет перемещать-. ся с постоянным шагом. Если направления вращений ходового винта 7 и ричаг& 16 будут противопо ложны, то подача сигнала на остановку электродвигателя произойдет после noatv рота ходового винта 7 на угол (Ч-М,). В этом случ каретка переместится на шаг 2- , меньший, чем Регулировка шага производится поворо том копира 2р относительно оси 24. Фиксация копира осу1иест(вйяется винтом 2. о р м у л а и а о б р е т е н и я Механизм шагового перемашеаия, содержащий основание с направйякицими,На которык установлена каретка, связанная через консоль и кинематическую пару ходовой винт-гайка с электроприводом,и узел компенсации погрешности шага ходового винта, выполненный в виде кор ректирующей линейки, связанной с роликом, жестко закрепленным на ходовой гайке, отличающийся тем, что, с цепью упрощения механизма и повышения его надежности, он содержит регулируемый копир, закрепленный на каретке, и регулятор шага, выполненный в виде диска с отверстием, жестко закрепленного на оси ходового винта, скобы, установленной на оси ходового винта с возможностью радиального перемещения, и бесконтактного датчика, установленного на скобе, причем .скоба через жест-: ко еакрепленньй на ней ролик, связанный с качающимся рьиагом, на конце которого укреплен другой ролик, связана с регулируемым копиром. Источники информации, принятые во внимание при экспертизе 1.Патент США № 37203О9, кл. 209-73, 1974. 2,Тахническое описание и инструкция по эксплуатадии 3.104.О01 ТО полуавтомата скрайбйрованая пластин Алмаз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изготовлениябОРТОВыХ КОлЕц | 1979 |
|
SU844368A1 |
| Устройство для шаговых линейных перемещений | 1978 |
|
SU753729A1 |
| Устройство для шаговых перемещений | 1977 |
|
SU719935A1 |
| Устройство для шаговых линейныхпЕРЕМЕщЕНий | 1979 |
|
SU846435A1 |
| Автомат сортировки и укладки кристаллов по группам | 1975 |
|
SU560653A1 |
| Устройство резки листового материала | 1979 |
|
SU946821A1 |
| Устройство для резания древесины проволокой | 1988 |
|
SU1604615A1 |
| Устройство для шаговых перемещений | 1979 |
|
SU825404A1 |
| Установка для контактной точечной сварки | 1981 |
|
SU998051A1 |
| Устройство для прецизионного позиционирования объектов | 1978 |
|
SU660028A1 |