1
Изобретение относится к области манипуляторостроения и может быть использовано ири создании дистанционных манипуляторов.
Известны дистанционные манипуляторы.
Манипулятор 1, содержащий датчики перемещений задающего органа, усилители и исполнительные механизмы исполнительного органа, имеет тот недостаток, что при работе с ним оператор испытывает большие физические нагрузки.
Р1аиболее близким техническим рещением к изобретению является дистанционный манипулятор 2, содержаниш вычислительное устройство, соответству1ОН1,ие входы которого соединены с выходами датчиков перемещения плечевого и локтевого щарниров задающего устройства и датчиков положения плечевого и локтевого суставов, а выходы - с входами приводов плечевого и локтевого суставов, датчик перемещения запястья, подключенный через блок астатического управления к входу привода запястья, датчик перемещения схвата, соединенный через блок позиционного унравлення с входом привода схвата, и датчик положения схвата, подключенный к одному из входов блока позиционного управления.
При работе с указанным манипулятором физические нагрузки на оператора уменьщены. Однако параметры его системы управления фиксированы, что не позволяет оптимальным образом настраивать систему для выполнения как грубых, так и особо точных операций с учетом специфики, вносимой человеком-оператором.
Цель изобретения - расщирение области применения манипулятора.
Это достигается тем, что система унравления дистанционным манипулятором содержит
последовательно соединенные датчик усилия сжатия рукоятки задающего устройства и блок изменен я коэффициента усиления, выход которого подключен к одному из входов вычислительного устройства и блока астатическою управления.
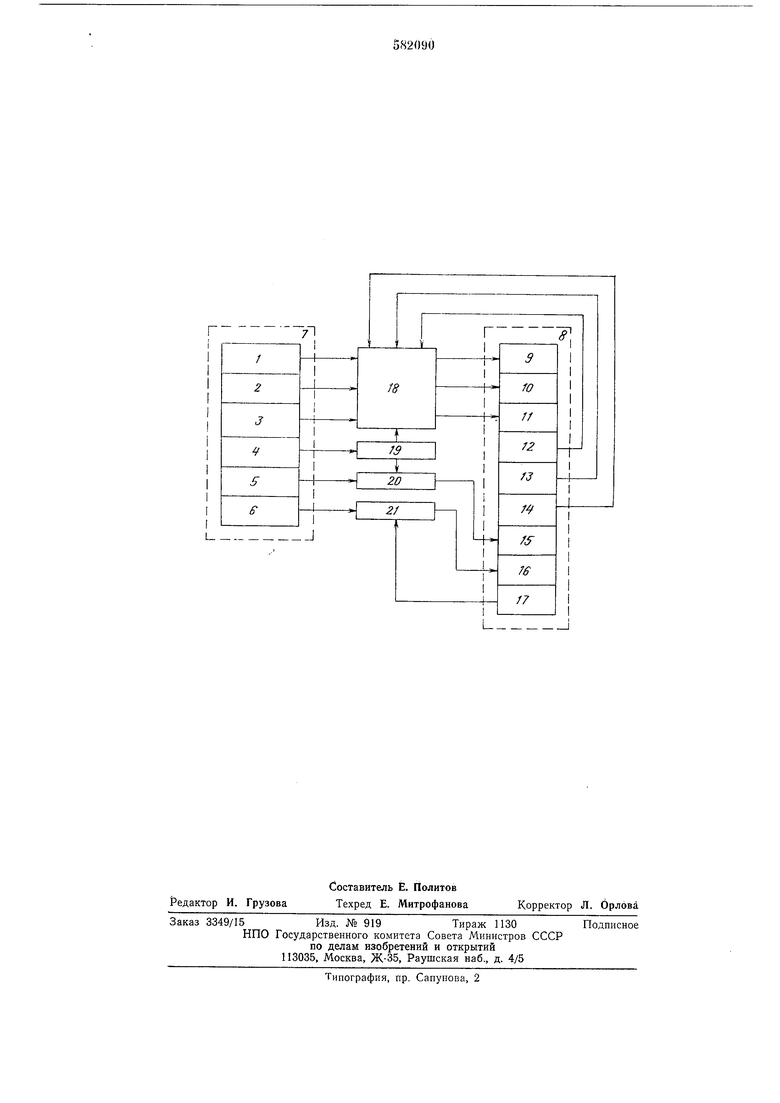
На чертеже представлена функциональная схема системы управления дистанционным манипулятором.
Она содержит датчики 1 и 2 перемещения
плечевого щарннра, датчик 3 перемещения локтевого щарннра, датчик 4 усилия сжатия рукоятки, датчик 5 перемещения запястья, датчнк 6 перемещения схвата, которые образуют задающее устройство 7, исполннтельный
орган 8, состоящий из приводов 9, 10 плечевого сустава, прпвода 11 локтевого сустава, датчиков 12, 13 положения плечевого сустава, датчика 14 положения локтевого сустава, привода 15 запястья, прпвода 16 схвата, датчика 17 положения схвата, а также вычислительное устройство 18, блок 19 изменения коэффициента усиления, блок 20 астатического управления, блок 21 иозиционного управления.
Система уиравления дистанционным манипулятором работает следующим образом.
Воздействуя на рукоятку, оиератор с помощью основной цепи уиравления обеспечивает перемещения элементов исполнительного органа манипулятора со скоростями, пропордиоиальиыми величинам относительных перемещений элементов задающего устройства. Эта информация снимается с помощью датчиков 1, 2, 3. Полученные сигналы поступают в вычислительное устройство 18, где по известным из прототипа формулам перерабатываются в сигналы, попадающие на приводы 9, 10, 11. Для этого в устройство 18 подаются также сигналы с датчиков 12, 13, 14. Астатическое управление вращением запястья осуществляется от датчика 5, а позиционное управление работой схвата - от датчика 6 с использованием обратной связи от датчика 17. Скорость перемещения исполнительного органа манипулятора регулируется оператором, который силой сжатия рукоятки управления посредством датчика 4 задает величину коэффициента усиления машины. Сигнал с датчика 4, преобразованный в блоке 19, поступает в устройство 18, а также в качестве сомножителя сигнала с датчика 5 --в блок 20. Величина коэффициента усиления при этом регулируется в соответствии с индивидуальными особенностями оператора и требованиями к точности и скорости выполнения производственной операции. Максимальное и минимальное (с учетом реализуемости) значения коэффициента усиления обеспечивают соответственно максимальное быстродействие и точность работы системы «оператор - манииулятор.
Предлагаемая система позволяет при выполнении не требующих точности транспортировочных операций достигнуть повышения быстродействии по сравнению с режимами, характеризующимися высокой точностью работы системы, в среднем более чем в пять раз. При работе в режимах -повышенной точности ошибки системы по сравнению с режимами транспортирования могут быть уменьшены в срсднем также более чем « пять раз.
Формула изобретения
Система управления дистанционным манипулятором, содержащая вычислительное устройство, соответствующие входы которого соединены с выходами датчиков перемещения нлечевого и локтевого шарниров задающего устройства и датчиков положения плечевого и локтевого суставов, а выходы - с входами
приводов плечевого и локтевого суставов, датчик перемещения запястья, подключенный через блок астатического управления к входу привода запястья, датчик перемещения схвата, соединенный через блок позиционного
управления с входом привода схвата, и датчик положения схвата, подключенный к одному из входов блока позиционного управления, отличающаяся тем, что, с целью расщирения области применения манипулятора, система содержит последовательно соединенные датчик усилия сжатия рукоятки задающего устройства и блок изменения коэффициента усиления, выход которого подключен к одному из входов вычислительного устройства и блока астатического управления.
Источиики информации, принятые во внимание при экспертизе
1. Каталог-справочник «Манипуляторы. Л., 1968, с. 93.
2. Авторское свидетельство СССР №271252, кл. В 25J 3/04, 1969.
I
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| Манипулятор | 1974 |
|
SU561656A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| КОМПЛЕКС КОПИРУЮЩЕГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ АНТРОПОМОРФНОГО РОБОТА | 2019 |
|
RU2725930C1 |
| Устройство для управления астатическим манипулятором | 1982 |
|
SU1037206A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ МАНИПУЛЯТОРОМ | 2018 |
|
RU2710290C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| СПОСОБ КОПИРУЮЩЕГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ АНТРОПОМОРФНОГО РОБОТА | 2019 |
|
RU2724769C1 |
1
