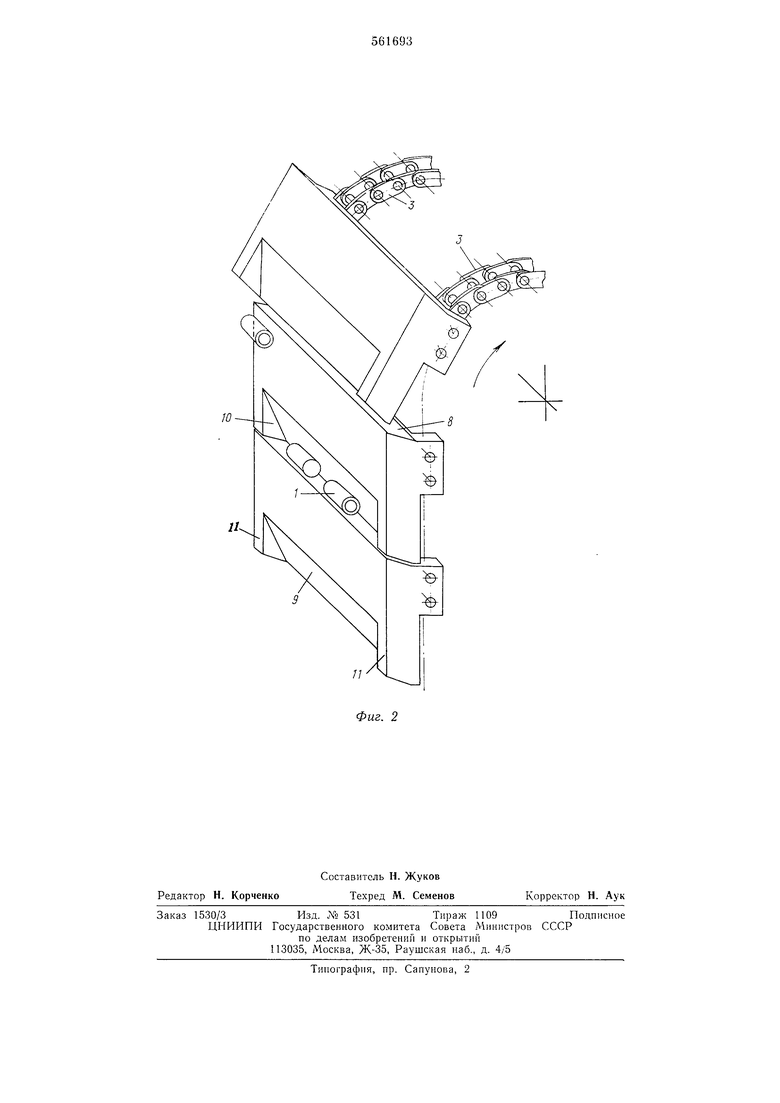
тяжной звездочки 4. Здесь каждая пластина 7, переходящая на кротовой участок трае;ктории, своим скосам 9 смещает изделия 1, находящиеся на полке 8 следующей нижней пластины, п сбрасывает их а лоток 12.
Благодаря тому, что полкп 8 нластии 7 имеют наклоны, а скосы 9 этих пластин ограничены расположенны.ми по их бо-кам козырьками И, изделия 1 надежно удерживаются во вместилищах 10 н не заклиниваются при транспортировании.
Формула изобретения
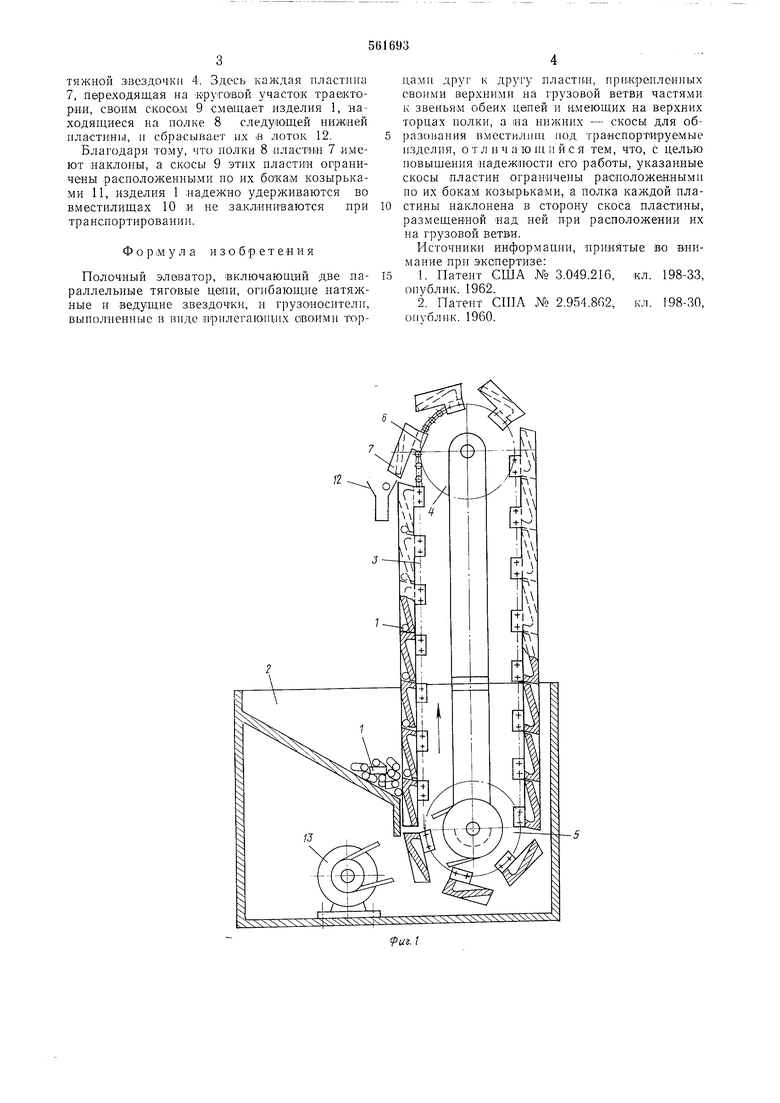
Полочный элеватор, включающий две параллельные тяговые цепи, огибающие натяжные и ведущие звездочки, п грузоносители, выполненные в виде ;11рилега1он1,11х своими торцамп друг к другу пластин, прикрепленных своими верхними на грузовой ветви частями к звеньям обеих цепей и имеющих на верхних торцах полки, а еа нижних - скосы для образонания вместилищ иод транспортируемые изделия, отличаюпи1йся тем, что, с целью новыщения надежности его работы, указанные скосы пластин ограничены расноложеняыми по их бокам козырьками, а полка каждой пластины на,клонена в сторону скоса пластины, размещенной над ней при расположении их на грузовой ветви.
Источники информации, нринятые во внимание при экспертизе:
1.Патент США № 3.049.216, кл 198-33 онублик.1962.
2.Патент США № 2.954.862, кл. 198-30 оиублик. 1960.
| название | год | авторы | номер документа |
|---|---|---|---|
| Элеватор | 1984 |
|
SU1196317A1 |
| Винтовой конвейер для цилиндрических изделий | 1983 |
|
SU1144947A1 |
| Полочный элеватор | 1975 |
|
SU581026A1 |
| Ковшовый конвейер | 1975 |
|
SU587054A1 |
| Полочный элеватор | 1975 |
|
SU583037A1 |
| Ротор ориентации штучных деталей | 1979 |
|
SU812519A1 |
| Конвейер для вертикального перемещения грузов | 1977 |
|
SU781123A1 |
| Роторно-конвейерный автомат | 1979 |
|
SU856747A1 |
| Механизм замедления движения втулочно-роликовой цепи на технологической позиции конвейера | 1978 |
|
SU745804A1 |
| Роторный автомат питания | 1981 |
|
SU994208A1 |