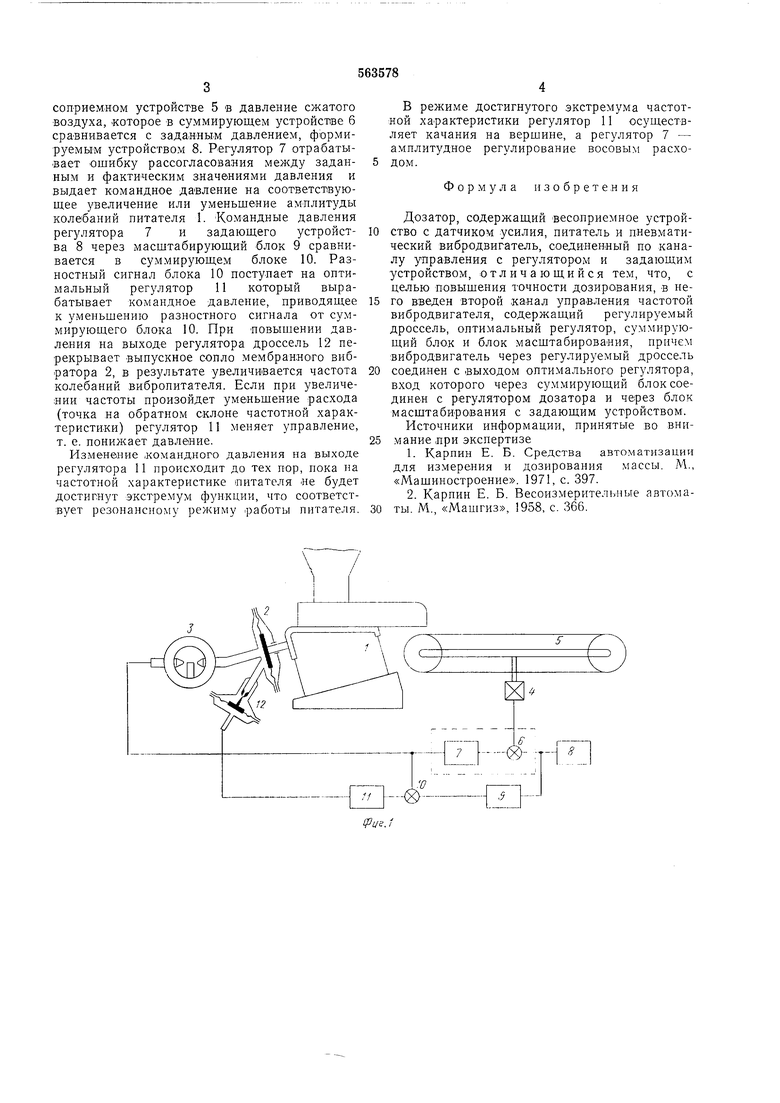
соприемном устройстве 5 в давление сжатого воздуха, которое в суммирующем устройстве 6 сравнивается с задайны-м давлением, формируемым устройством 8. Регулятор 7 отрабатывает ошибку рассогласования между заданным и фактическим значениями давления и выдает командное давление на соответствуюoj,ee увеличение или уменьшение амплитуды колебаний питателя 1. Командные давления регулятора 7 и задаюш,его устройства 8 через масштабирующий блок 9 сравнивается в суммирующем блоке 10. Разностный сигнал блока 10 поступает на оптимальный регулятор 11 который вырабатывает командное давление, приводящее к уменьшению разностного сигнала от суммирующего блока 10. При повышении давления на выходе регулятора дроссель 12 перекрывает выпускное сопло мембранного вибратора 2, в результате увеличивается частота колебаний вибропитателя. Если при увеличении частоты произойдет уменьшение расхода (точка на обратном склоне частотной характеристики) регулятор 11 меняет управление, т. е. понижает давление.
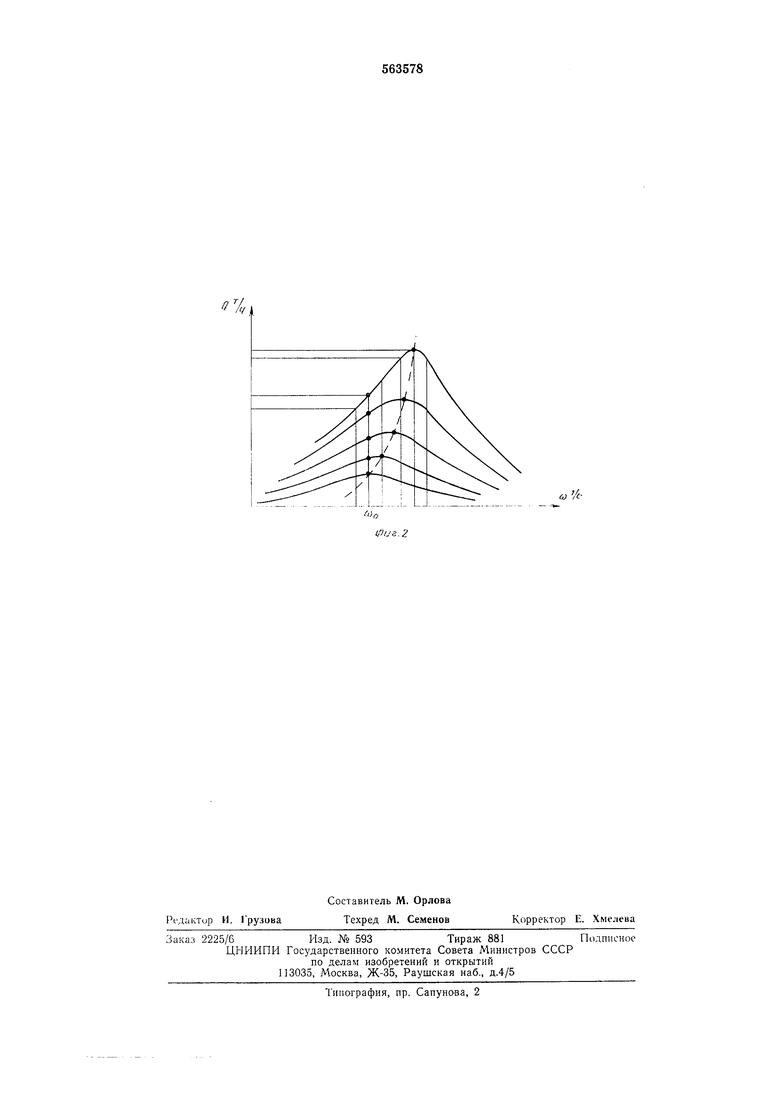
Изменение .командного давления на выходе регулятора 11 происходит до тех пор, пока на частотной характеристике питателя не будет достигнут экстремум функции, что соответствует резонансному режиму .работы питателя.
В режиме достигнутого экстремума частотной характеристики регулятор 11 осушествляет качания на вершине, а регулятор 7 - амплитудное регулирование носовым расходом.
Формула изобретения
Дозатор, содержащий весоприемное устройство с датчиком усилия, питатель и пневматический вибродвигатель, соединенный по каналу управления с регулятором и задающим устройством, отличающийся тем, что, с целью повышения точности дозирования, в него введен второй ханал управления частотой вибродвигателя, содержащий регулируемый дроссель, оптимальный регулятор, суммирующий бло.к и блок масштабирования, причем вибродвигатель через регулируемый дроссель
соединен с выходом оптимального регулятора, вход которого через суммирующий блок соединен с регулятором дозатора и через блок масштабирования с задающим устройством. Источники информации, принятые во внимание при экспертизе
1.Карпин Е. Б. Средства автоматизации для измерения и дозирования массы. М., «Мащиностроение. 1971, с. 397.
2.Карпин Е. Б. Весоизмерительные автоматы. М., «Машгиз, 1958, с. 366.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления весовым непрерывным дозированием | 1977 |
|
SU654859A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| Устройство для весового дозирования веществ,подлежащих смешиванию | 1981 |
|
SU972242A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| ПНЕВМАТИЧЕСКИЙ ДИСКРЕТНЫЙ РЕГУЛЯТО ОПТИМАЛЬНОГО РЕЖИМА | 1971 |
|
SU432457A1 |
| Весовой дозатор непрерывного действия | 1977 |
|
SU678321A1 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
| РЕГУЛЯТОР И УКАЗАТЕЛЬ СКОРОСТИ ДЛЯ ГИДРАВЛИЧЕСКИХ ПРЕССОВ | 1972 |
|
SU428963A1 |
| Пневматическое устройство управления весовым порционным дозатором | 1974 |
|
SU532015A1 |
| Автоматический питатель раздатчика кормов | 1986 |
|
SU1445651A1 |