1
Изобретение относится к технике измерения неэлектрических величин и может быть использовано для измерения моментов, скоростей и ускорений асинхронных двигателей с известным моментом сопротивления нагрузки.
Для получения сигнала о величине скорости и ускорения наиболее часто используют измерители ускорения сейсмического типа п интеграторы для получения сигнала скорости, либо осуществляют дифференцирование сигнала тахогенератора 1, 2.
Известно устройство для измерения момента асинхронного двигателя 3, содержащее вычислитель, определяющий по величине токов и напряжений в фазах электромагнитный момент. Однако для определения скорости и ускорения двигателя необходимо использовать дополнительные датчики и осуществлять дифференцирование или интегрирование их сигналов.
Цель изобретения - измерение скорости и ускорения.
Это достигается тем, что в предлагаемое устройство дополнительно введены блок моделирования момента сопротивления исполнительного механизма, непрерывная развертка которого создается с помощью генератора пилообразного напряжения и блок вычисления ускорения и скорости по зависимостям
) / - приведенный момент инерции, при это.м выходы блока моделирования и вычислиТ2ЛЯ электромагнитного момента соединены с входами блока вычпслгния ускорения и скорости.
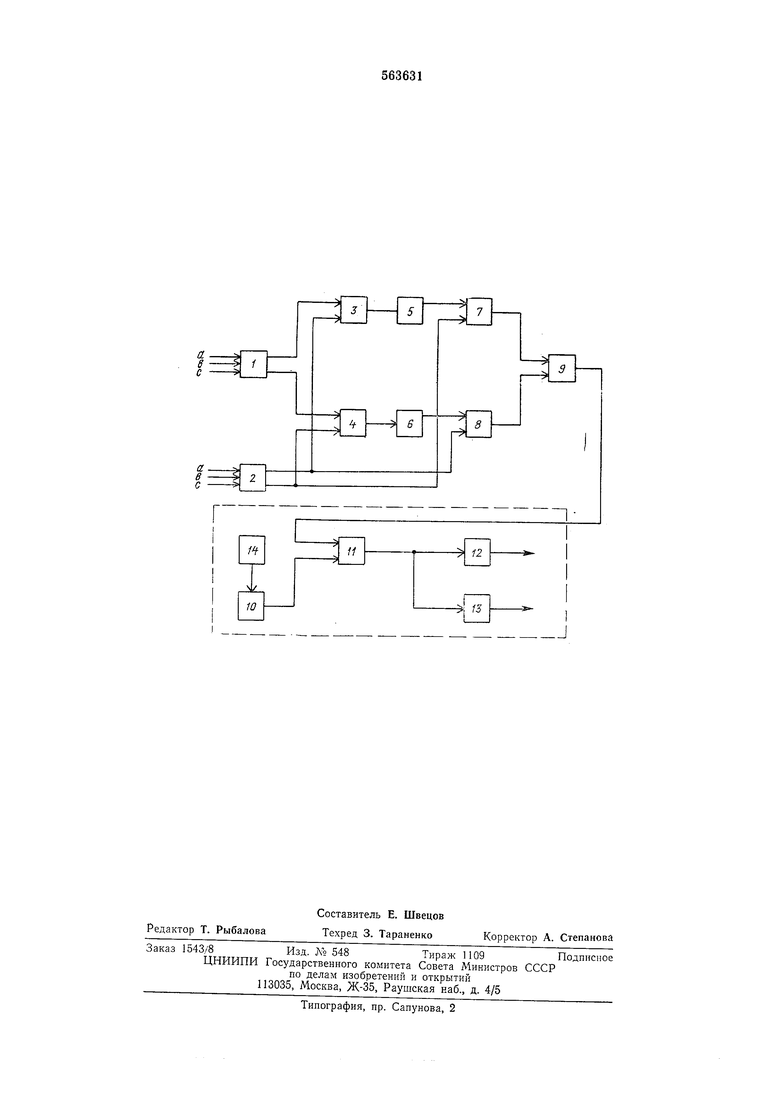
На чертеже показана блок-схема предлагаемого зстройства для измерения момента асинхронного двигателя.
Измеряют действительные значения токов и напряжений статора двигателя и подают на вход вычислительного устройства. С помон ью вычислительного }стройства определяют электромагнитный момент электродвигателя по зависимости
о
УИэ -о„.-с„ или
9 -(тх -ФкУп
где -фст - результирующий вектор потокосцепления статора;
4л- - мгновенные значения составляющих -фст по дву.м прямоугольным координатам х и у; гот - результирующий вектор тока статора;ix, iy-мгновенные значения составляющих /ст по двум прямоугольным координатам X VL у. Составляющие результирующих векторов тока статора /ст и напряжение статора вычисляют по зависимости (ib - О; , (o,-y,), где ia, ib, ic - токи фаз статора; Va, Vb, Vc - напряжения. Составляющие результирующего вектора потокосцепления статора находят по зависимостиIx IK-fx); by(Vy-iyf)df, где s-активное сопротивление фазы статора. Все вычисления, указанные выще, делаются автоматически с помощью вычислительного устройства. В блоках 1 и 2 выделяются составляющие Vx, VY, ix, iy, в блоках 3 и 4 определяются производные потокосцепления . D . dt х Uylyt J., в блоках 5 и 6 происходит интегрирование и вычисление ij;, -фу. Блоки 7 и 8 служат для перемножения величин ij);c, iV и -фу, ix. В блоке 9 реализуется зависимость. () В блоке 10 производится моделирование момента сопротивления Мс исполнительного механизма, который вводится в блок 11. Момент сопротивления также можно вводить в вычислительное устройство непосредственно с датчиков для измерения момента исполнительного механизма. В блоках И и 12 реализуется зависимость с определением ускорения i(A,.-A,J, где W - скорость; / - приведенный момент инерции. В блоке 13 происходит интегрирование и вычисление скорости по зависимости г dw В блоке 14 формируется пилообразное напряжение для создания непрерывной развертки момента сопротивления во времени. Формула изобретения Устройство для измерения момента асинхронного двигателя, нагруженного на исполнительный механизм, содержащее вычислитель электромагнитного момента по действующим значениям тока и напряжения в фазах, отличающееся тем, что, с целью измерения скорости и ускорения, в устройство дополнительно введены блок моделирования момента сопротивления исполнительного механизма и блок вычисления ускорения и скорости по разности электромагнитного момента и момента сопротивления, при этом выходы блока моделирования и вычислителя электромагнитного момента соединены с входами блока вычисления ускорения и скорости. Источники информации, принятые во внимание при экспертизе 1.Туричин А. М. Электрические измерения неэлектрических величин. М., 1966, с. 602-610. 2.Агейкин Д. И. и др. Датчики контроля и регулирования, М., 1965, с. 475-502. 3.Авторское свидетельство СССР № 342093. кл. G ОН 3/00,1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2004 |
|
RU2301975C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 1972 |
|
SU342093A1 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1990 |
|
SU1770785A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ И МАГНИТНЫМ ПОТОКОМ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2469459C1 |
| УСТРОЙСТВО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2766907C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2023 |
|
RU2819147C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2476982C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |