(54) РОТОР ОРИЕНТАЦИИ ШТУЧНЫХ ДЕТАЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротор ориентации штучных деталей | 1979 |
|
SU812519A1 |
| Ротор ориентации штучных деталей | 1983 |
|
SU1098752A1 |
| Ротор ориентации штучных деталей | 1978 |
|
SU712234A1 |
| Ротор ориентации штучных изделий | 1978 |
|
SU841904A1 |
| Ротор ориентации штучных деталей | 1976 |
|
SU622644A1 |
| Роторный автомат питания | 1979 |
|
SU891323A1 |
| Роторно-конвейерный автомат | 1979 |
|
SU856747A1 |
| Загрузочный ротор | 1988 |
|
SU1599177A1 |
| Загрузочный ротор | 1989 |
|
SU1616799A1 |
| Роторный автомат питания | 1976 |
|
SU564139A1 |
t
Изобретение относится к машиностроению, а конкретнее к устройствам ориентации и подачи цилиццрических деталей типа колпачков в автоматические роторные линии.
По основному авт. св. № 267306 известен ротор ориентации штучш)1х деталей, содержащий устройство подачи деталей к механизмам ориентации в виде сквозного поворотного вместилища, поддерживатель, расположенный под вместилищем, и устройство приема ориентированных деталей,, выполненное, например, в виде транспортной цепи, причем поддерживатель выполнен в виде вертикального, подвижного от копира стержня, расположенного, например, в приемной транспортной цепи р1 J.
Данный ротор не обеспечивает удалейие неправильно ориентированных деталей при ориентации деталей донышком в ни я.
Цель изобретения - повьшеш е надежности работы.
Поставленная цель достигается тем, что ротор снабжен втулками, установленными концентрично каждому стержню, причем торец каждой втулки, обращенный к вместилищу, наклонен к оси ротора.
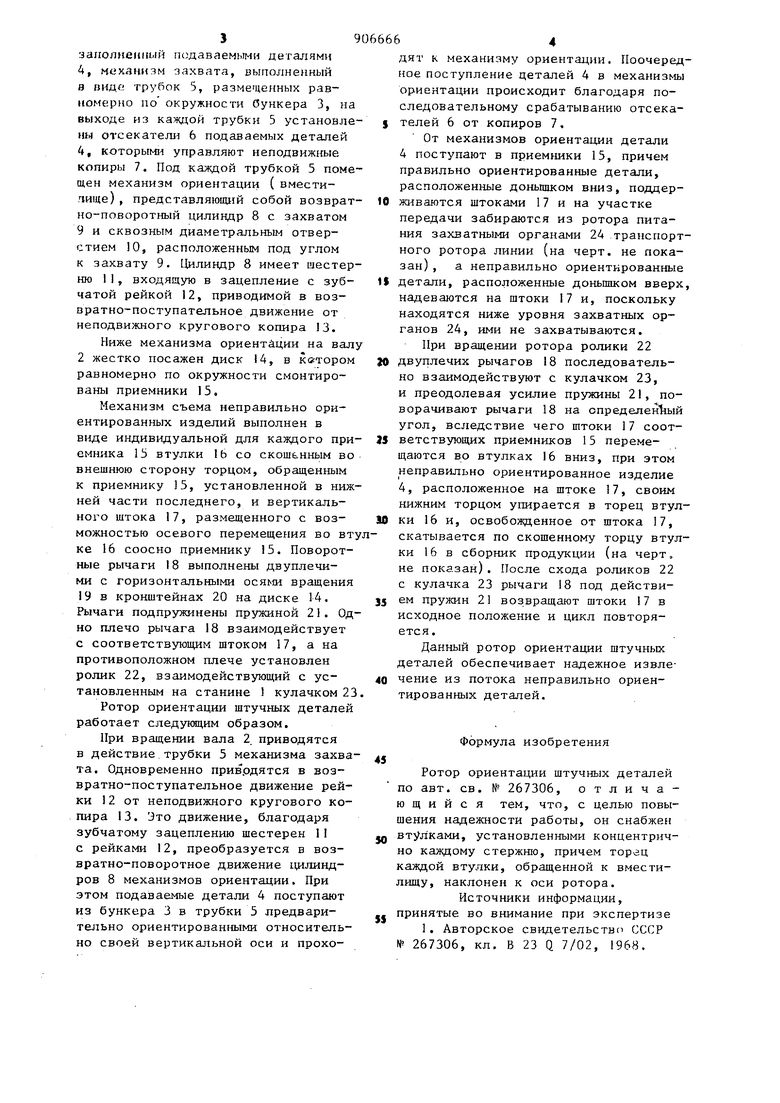
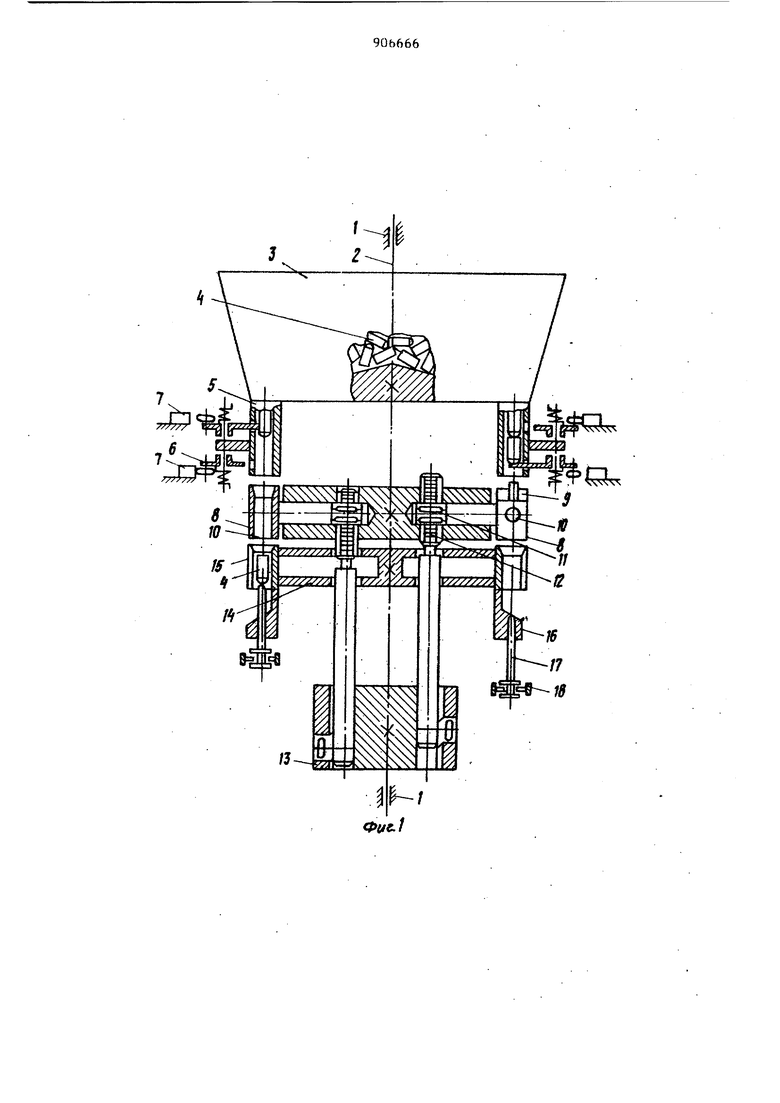
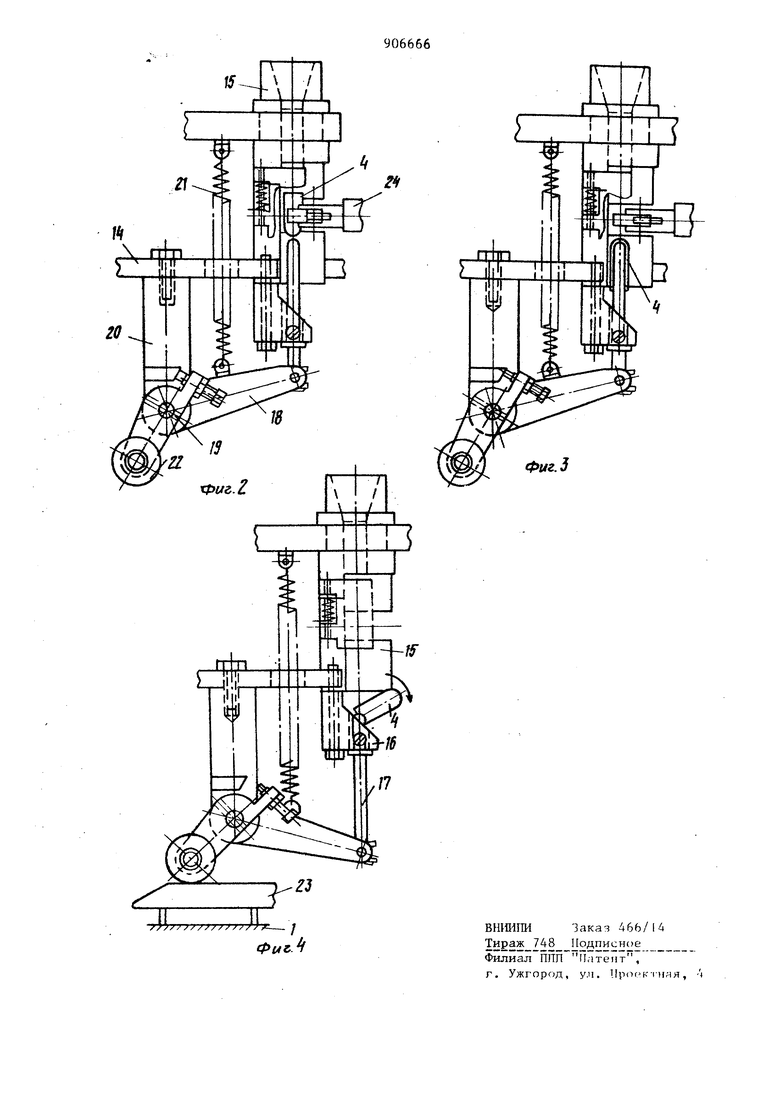
На фиг. 1 изображен ротор ориентации штучных деталей, продоль10ный разрез; на фиг. 2 - приемник и механизм съема в момент приема и передачи правильно ориентированного изделия из ротора ориентации в транспортный ротор, вид сбоку; на фиг. 3 - то же, в момент приема неправильно ориентированного изделия на штырь механизма сброcaj на фиг. 4 - то же, в момент сброса неправильно ориентированно20го изделия.
Ротор ориентации штучных деталей содержит станину I, вал 2, на котором жестко закреплен бункер 3, заполненный подаваемыми деталями 4, м«хани:)м захвата, выполненный в виде трубок 5, размещенных равномерно по окружности бункера 3, на выходе из ка.ждой трубки 5 установле ны отсекателл 6 подаваемых деталей 4, которыми управляют неподвижные копиры 7. Под каждой трубкой 5 поме щен механизм ориентации ( вместилище) , представляющий собой возврат но-поворотный цилиндр 8 с захватом 9 и сквозным диаметральным отверстием 0, расположенным под углом к захвату 9. Цилиндр 8 имеет шестер ню 11, входящую в зацепление с зубчатой рейкой 12, приводимой в возвратно-поступательное движение от неподвижного кругового копира 13. Ниже механизма ориентации на вал 2 жестко посажен диск 14, в котором равномерно по окружности смонтированы приемники 15, Механизм съема неправильно ориентированных изделий выполнен в виде индивидуальной для каждого при емника 15 втулки 16 со СКОШЕННЫМ во внешнюю сторону торцом, обращенным к приемнику 15, установленной в ниж ней части последнего, и вертикального штока 17, размещенного с возможностью осевого перемещения во в ке 16 соосно приемнику 15. Поворотные рычаги 18 выполнены двуплечими с горизонтальными осями вращени 19 в кронштейнах 20 на диске 14. Рычаги подпружинены пружиной 21. Од но плечо рычага 18 взаимодействует с соответствующим штоком 17, а на противоположном плече установлен ролик 22, взаимодействующий с установленным на станине 1 кулачком 2 Ротор ориентации штучных детале работает следующим образом. При вращении вала 2. приводятся в действие трубки 5 механизма захв та. Одновременно приводятся в возвратно-поступательное движение рей ки 12 от неподвижного кругового ко пира 13. Это движение, благодаря зубчатому зацеплению шестерен 11 с рейками 12, преобразуется в возвратно-поворотное движение цилиндров 8 механизмов ориентации. При этом подаваемые детали 4 поступают из бункера 3 в трубки 5 лредварительно ориентирован1а1ми относитель но своей вертикальной оси и прохо4дят к механизму ориентации. Поочередное поступление деталей 4 в механизмы ориентации происходит благодаря последовательному срабатыванию отсекателей 6 от копиров 7. От механизмов ориентации детали 4 поступают в приемники 15, причем правильно ориентированные детали, расположенные доньшжом вниз, поддерживаются штоками 17 и на участке передачи забираются из ротора питания захватными органами 24 транспортного ротора линии (на черт, не показан) , а неправильно ориентированные детали, расположенные доньшжом вверх, надеваются на штоки 17 и, поскольку находятся ниже уровня захватных органов 24, ими не захватываются. При вращении ротора ролики 22 двуплечих рычагов 18 последовательно взаимодействуют с кулачком 23, и преодолевая усилие пружины 21, поворачивают рычаги 18 на определений угол, вследствие чего штоки 17 соответствующих приемников 15 перемещаются во втулках 16 вниз, при этом неправильно ориентированное изделие 4, расположенное на штоке 17, своим нижним торцом упирается в торец втулки 16 и, освобожденное от штока 17, скатывается по скошенному торцу втулки 16 в сборник продукции (на черт, не показан). После схода роликов 22 с кулачка 23 рычаги 18 под действием пружин 21 возвращают штоки 17 в исходное положение и цикл повторяется. Данный ротор ориентации штучных деталей обеспечивает надежное извлечение из потока неправильно ориентированных деталей. Формула изобретения Ротор ориентации штучных деталей по авт. св. № 267306, отличающийся тем, что, с целью повышения надежности работы, он снабжен втулками, установленными концентрично каждому стержню, причем торец каждой втулки, обращенной к вместилищу, наклонен к оси ротора. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельств СССР № 267306, кл. В 23 Q 7/02, 1968.
