1
Изобретение относится к радиоэлактрониой промышлелпости и может быть использовано при производстве .полупроводниковых приборов, преимущественно бескорпусных, для автоматического измерения электрических пара метров, классификации с последующей раздельпой раскладкой измеренных приборов.
Известны клаюсифи.каторы лолуправодниковых приборов, содержащие измерительное устройство, коятактное устройство для подключения прибора к измерительному устройству, логическое устройство, обрабатывающее результаты намерений и через запоминающееустройство, подающее сигнал иа устройство раокладки приборов в тару 1.
Указанные .классификаторы в оснавиом предназначены для измерения полупроводниковых приборов в корпусе с жесткими выводами и не позволяют измерять и классифицировать приборы в бескорпуснОМ исполнении в частности с клейким покрытием (кристалл, покрытый ко1мпаундом).
Полупроводниковые приборы, конструктивно выполненные в бескорпусно исполнении, имеют следующие особенности: выводы прибора имеют малый , относительно большую длину « большое соотношение длииы .к диаметру, пе допускают большого усилия на растяжение, не допускают большого контактного давленпя (Рлоп 20 г/вывод),
имеют клейкое покрытие кристалла и выполнены без твплооивода.
Вьгшеперечислен1ные асо:бенности бескорпусных приборов не донуокают транопортировку и выгрузку приборов навалом и inpinводят к тому, что при измерении электрических jiaipaiMeTipOB и 1классифика1ции с последующей разгруз1кой приборов не обеспечивается точное месторасположение выводов приборов
в Контактном устройстве, исключение прилипания прибора к устройству раскладки, что затрудняет |Выгрузку приборов, ностоя нство температуры переходов при подаче предельных режимов измерения, а следовательно и
значения измеряемых параметров.
Наиболее близким по технической сущности к заявляемому является устройство 2, которые сО|Держит измерительное устройство, блок памяти, координатный столик, контактпое устройство для подключения прибора к измерительному устройству, включающее кассету с пнез1дами, прижлм-захват с прижим ньрм кольцоМ и ко;нта|Ктную головку с контактами и прИводом, устройство раскладки измеренных приборов в транспортные кассеты, механизм перемещения транспортных кассет, выключающий каретку, .привод, электромагниты и программный датчик, устройство выгрузки.
Недостатки этого устройства следующие:
V iV
ниэкая производительность;
закрепление приборов .на кассете .вошсам вызывает попадайие воска «а «выводы во (время измерения, что ухудшает условия элвктр1Ичеокого контакта, а рас1пла1вление воска повышает тем.пературу измеряемых приборов;
inepeeoc приборов до измерения от кассеты к измер.ительному устройству является дополиителвной операцией;
устройст1во непригодно для ра.боты с приборами малОРо веса и клейким покрытием кристалла, так как происходит прилипаиие приборов ,к присосной голоеке, а выгруэка под действием собственного веса и сжатого воздуха затруднена;
классификация приборов проводился в режиме «брак-.годен, а поэтому уст1ройстгво не позволяет производить раздельную раскладку приборов при наличии более двух групп -клаОсификащии;
выбранная кассета и метод фик1сацниприбора вООюом «а кассете не позволяют проводить любую технологическую обработку приборов.
.Целью изобретения является повышение надежности и производительиости .классификатора, у1прощение его конструкции.
Это достигается тем, что в предлагаемом классификаторе каждое гнездо кассеты ко-нтактщого устройст1ва выполнено с отверстием, соединенным с напра1вляющими пазами, которые заканчщвают1ся Омвозны ми отвер|СТ(иями для прохода .KOHTaiKTOB контаа тной головки к прижим-захвату, IB который введены пфуж1ин«ный компенсатор и подиружиненный сбрасыватель со сквозиьга отверстием, причем .контактная голов(ка связана с неподэижньпм упором во время измерения прнбора, а прижимзахват за креплш на каретке устройства раскладки и перемещается к транспортным кассетам, .на каретке механизма перемещения которых закреплены электромагниты, подключенные к блоку па мнт1И, привод карепки соединен с программньгм датчиком, выходы которого подключены к блоку па-мяти и приводу.
Взаимное расположение элементов механизма перемещения транопортных каюсет, а именно расположение на каретке элвктромагHHTOiB, подключение .их к блоку па.мяти, соединение привода ка1ретки с програмМНЫМ датчиком и подкл:1Очение выходов nporpaMMiHoro датчика к блоку .памяти и Приводу нозволяет осущестиить раздельную раскладку измеренных приборов в транспортные кассеты, причем перемещение транспортных кассет осущест1вляет1ся во время возврата устройства, раскладки в исходное положение и замера очередного прибора.
Увеличенне производительности классификатора также .достигается местораоположевиам KOHTaiKTiHoro устройства, а именно размещением его 1нецосре|дствен но около места выгрузки приборов, причем .моордииатный столик ВО время Измерения перемещается под
565338
плиту с транспортными кассетами с выхо.дом из-под нее после замера последнего прибора в кассете, что позволяет сократить путь перемещен1ия при выгруэке приборов ъ транспортные кассеты.
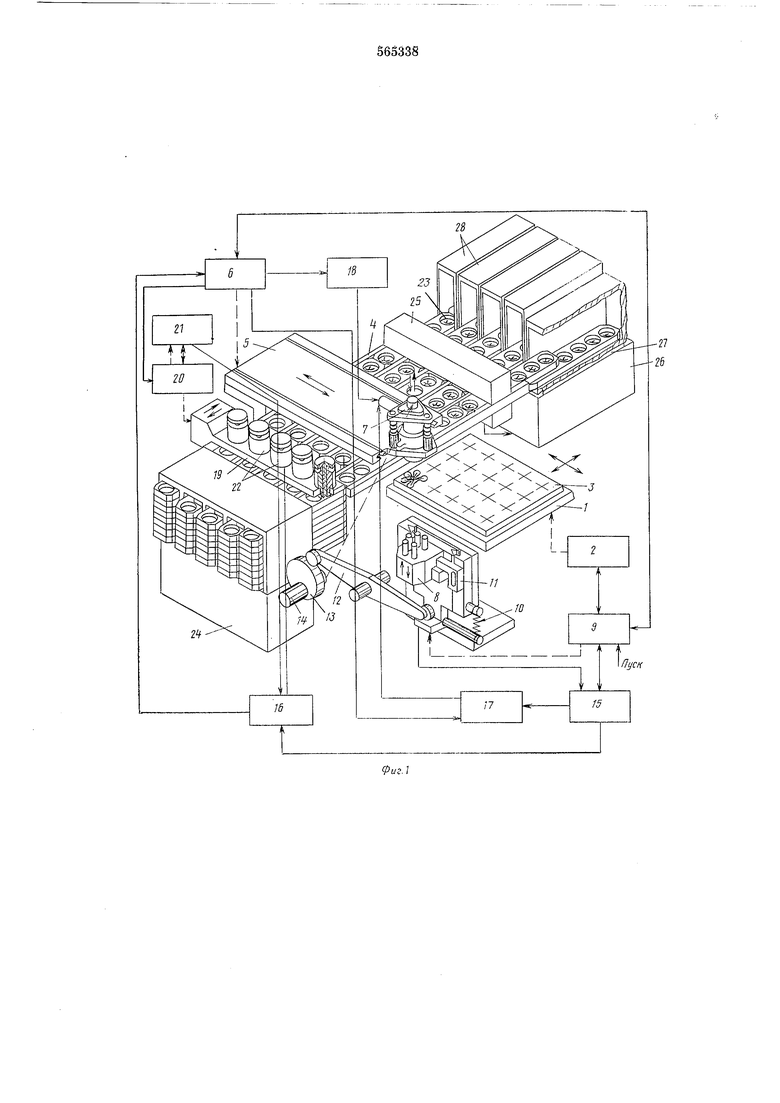
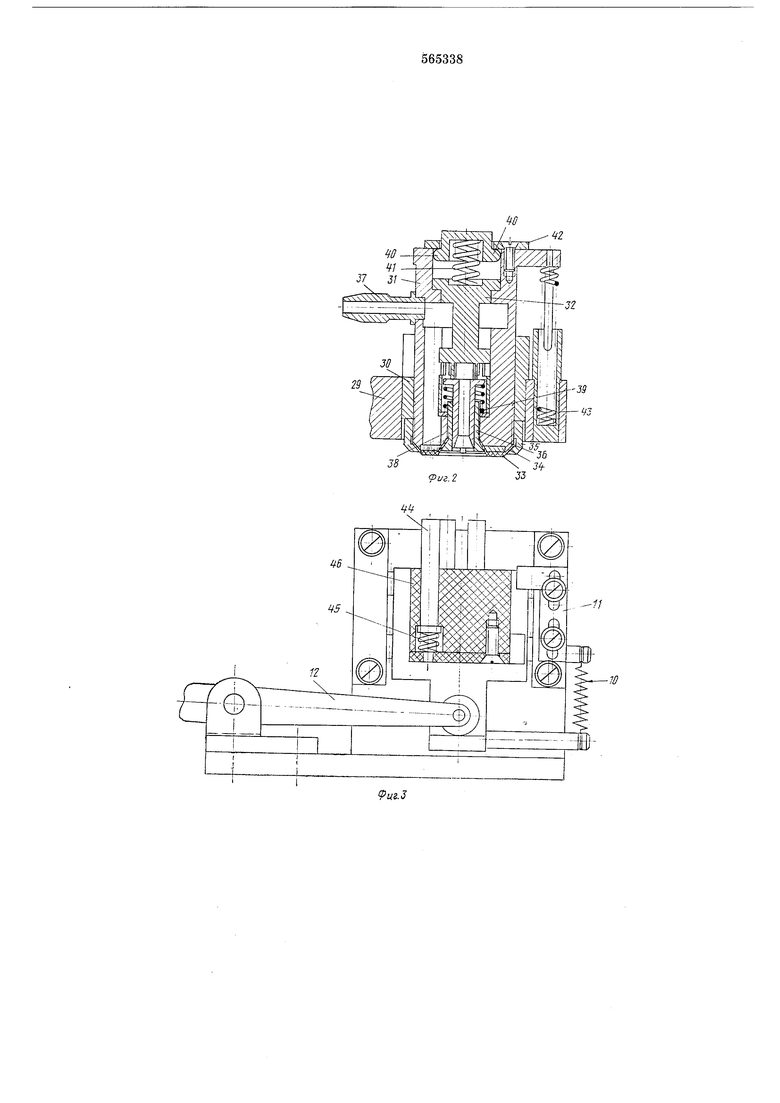
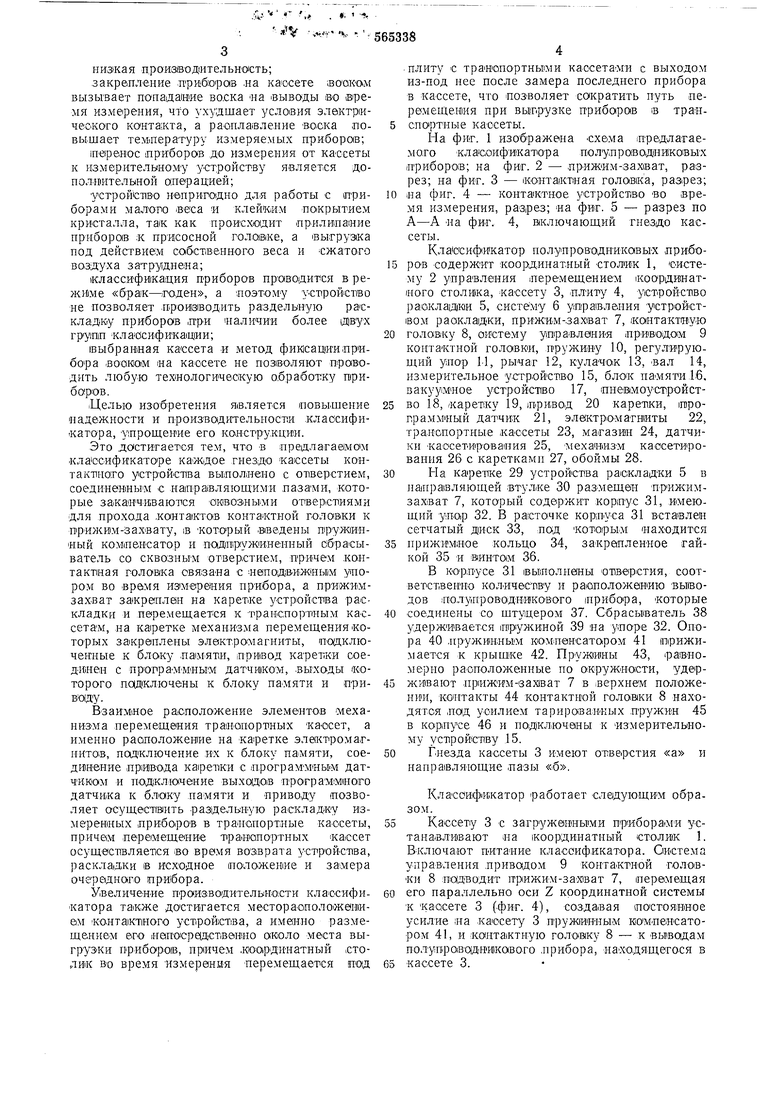
На фиг. 1 изображена схема предлагаеMo.ro Классификатора полупроводниковых приборов; на фиг. 2 - .прижим-захват, разрез; на фиг. 3 - одантактная головка, разрез;
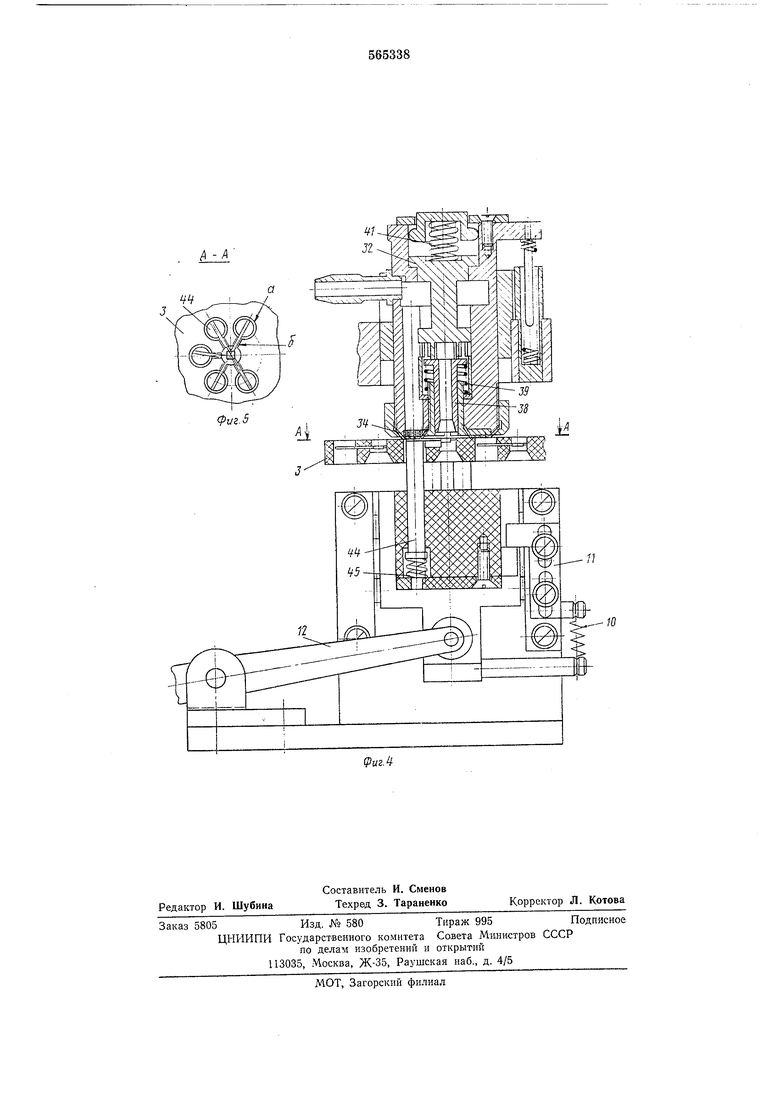
«а фиг. 4 - контактное устройстВ|0 во время измерения, разрез; на фиг. 5 - разрез по А-А на фиг. 4, В1ключающий гнездо кассеты.
Классификатор полунроводниковы-х лриборов содержит координатный столик 1, систему 2 управления перемещением коорди)натного столика, кассету 3, плиту 4, устройство раокладюи 5, систему 6 у;ора1влеиия устройством раскладки, прижим-.захват 7, контактную
голов1ку 8, систему упра влания пр«водо1М 9 коитактной головки, пружину 10, регулирующий упор М, рычаг 12, кулачок 13, -вал 14, измерительное устройство 15, блок памяти 16, вакуумное устройство 17, пиеемоустройство 18, каретку 19, привод 20 каретки, тролраммный датчик 21, электромагниты 22, транспортные кассеты 23, магазин 24, датчики кассетирования 25, механнзМ кассетирования 26 с каретками 27, обоймы 28.
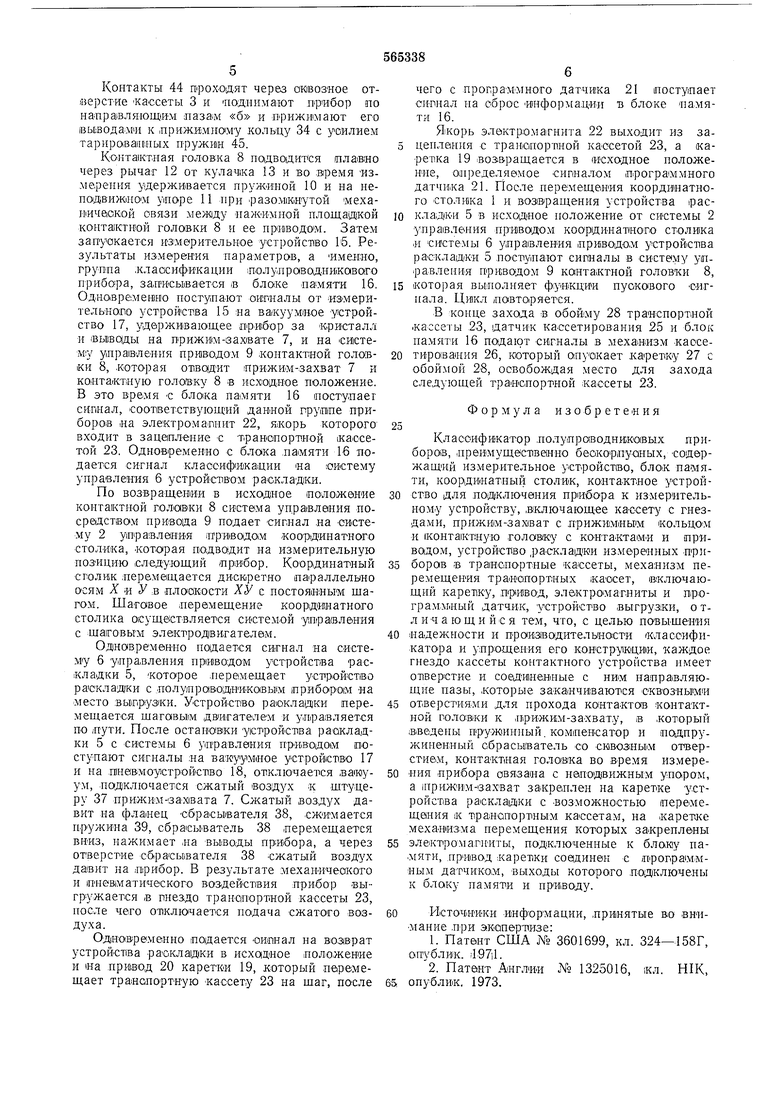
На каретке 29 устройст ва раскладки 5 в направляющей .втулке 30 раЗМещен прижимзахват 7, который содержит корпус 31, имеюп ий упор 32. В расточке Kopinyca 31 вставлен сетчатый диск 33, под которым находится
прижимное кольцо 34, закре(пленное гайкой 35 и иинтом 36.
В корПусе 31 выполнены отверстия, соответственно количеству и раоположевию выводов .полупроводникового прибора, которые
соединены со щтуцером 37. Сбрасыватель 38 удерживается иружиной 39 на упоре 32. Опора 40 .пружинным ком:пенсатором 41 1П1рижимается к крыщке 42. Пружины 43, равНОмерно расположенные по окружности, удерж:Юают .прижим-зах1ват 7 в .верхнем положении, контакты 44 контактной голоики 8 находятся л од усилием тарированных .пружин 45 в корпусе 46 и подключены к измерительному уст1ройству 15.
Гнезда кассеты 3 имеют отверстия «а и направляющие пазы «б.
Классификатор |работает следующим образом.
Кассету 3 с загруженными приборами устанавливают на коор.динатный столик 1. Включают питание класоиф.икатора. Система управления .приводом 9 контактной головКи 8 .подводит ирижим-заХ1ват 7, перемещая
его параллельно оси Z координатной системы к кассете 3 (.фиг. 4), создавая постоянное усилие 1на .кассету 3 пружинным компенсатором 41, и контактную голов(ку 8 --к выводам полупроводеикового .прибора, нахо.дящегося в
кассете 3.
Контакты 44 проходят через аивозиое от1ве) кассеты 3 и поднимают щуибор по наПраеляющим naBaiM «б и прижимают его вы:вoдa мlи к лрижимному кольцу 34 с усилием тарировацг-иых пружин 45.
Конта1ктная головка 8 падводнтся олавно через рычаг 12 от кулачка 13 и во время ИЗме.реиия удерживается пружииой 10 и на иеиодвижйюм уиоре И ири -разомжиутой мехаиичаокой связи между иажимной площадкой конта1кткой головки 8 и ее пра-шодом. Затем запуокается измерительное устройст1во 16. Результаты измереиия параметрав, а именно, .классификации ;полуправо1диико1вого прибора, записывается в блоке памяти 16. ОднО|Вре;меи1ио поступают оигналы от «ЗмерительНо;го устройства 15 яа важуумиое устройство 17, удерживающее прибор за -кристалл и iвыlвqды на прижиаьвахвате 7, и на систеMiy управления приводом 9 .контактной головки 8, .которая отвадит прижим-захват 7 и коята1КТ иую голо/вку 8 в исходное ноложение. В это время с блока па-мяти 16 поступаег сипнал, соответствующий дайной груине приборов «а электромапиит 22, якорь которого входит в зацаплепие с транопортной жассетой 23. Одновременно с блока .па1мяти 16 подается сигнал классификации «а систему управления 6 устройст1вом раскладки.
По возвращении в исходное положение коита1ктной голав1ки 8 система управления посредством привода 9 подает сигнал .на систему 2 управления (приводом координатного столика, .которая подводит на измерительную позицию следующий прибор. Координатный сголик .перемещается дискретно параллелБНО осям X :и У в плоокости ХУ с постоянным щагом. Шаговое неремещение координатного столика осуществляется систем.ой управления с щаговым электродвигателем.
Одновременно подается сигнал на систему 6 управления приводом устройства раскладки 5, которое .перемещает уст1ройст1во расклад ки с .полупро1в о;дниковы1м 1ПриборО1М на место вышрузки. Устройство раокламки перемещается шаговым двигателем и упра.вляется по (Пути. После остановки устройства раскладки 5 с системы 6 управления приводом поступают сигналы .на вакуумное устройст(во 17 и на .шшв юустройство 18, отключается .вамуум, подключается сжатый воздух к штуцеру 37 прижим-захвата 7. Сжатый воз.дух давит на фла1нец сбрасывателя 38, .сжимается пружина 39, сбрасыватель 38 перемещается вииз, нажимает ,па вьшо.ды прибора, а через отверстие сбрасы1вателя 38 сжатый воздух давит на .прибор. В результате механического и Ппев|матическ1ого воздействия выгружается в гнездо транспортной кассеты 23, после чего отключается подача сжатого воздуха.
Одиовременно подается ситнал на во.31врат устройства раскладки в исходное поло.жен1ие и иа нри1вод 20 каретки 19, который .перемещает транспортную кассету 23 на щаг, после
чего с программного датчика 21 поступает сигнал иа сброс информа.цип в блоке намяти 16.
Якорь электромагнита 22 выходит из зацепления с траиспорпиой кассетой 23, а каретка 19 1воэ.вращается в исходное положение, опре.деляемое сигналом программного датчика 21. После перемещения координатного столшка 1 и возвращения устройства раскладки 5 в исходное положение от системы 2 управления приводом координатного столика и системы 6 управления приводом устройства раскладки 5 .постуиают сипналы в систему управления приводом 9 контактной головки 8,
которая выполияет функции пускового сигиала. Ци1кл повторяется.
В конце захода в обойму 28 транспортной кассеты 23, датчик кассетирования 25 и блок памяти 16 подают сигналы в механизм кассетирования 26, который опускает каретку 27 с обоймой 2-8, освобождая место для захода следующей транспортной кассеты 23.
Формула изобрете ния
Классификатор .полупро водни1ковых при6opOiB, .иреимущественно беокорпуаных, содержащий измерительное устройст во, блок памяти, координатный столик, контактное устройство для подключения прибора к измерительному устройству, .включающее кассет с гнез.дами, прижим-зах1ват с прижимным кольцом и контактную гола&Щ с контактами и прнводом, устройство раскладки измеренных .приборов в транспортные кассеты, механизм перемещения транспортных кассет, включающий каретку, нрИвод, электромагниты и програм.м.ный датчик, устройство выгрузки, о тл и Ч а ю щ и и с я тем, что, с целью повышения
надежности и производительности классификатора и упрощения его конструкции, каждое гнездо кассеты контактного устройства имеет отверстие и соедИ нен1Ные с ним направляющие пазы, .которые заканчиваются сквозными
отверстиями для прохода контактов контактной ГОЛОВ1КИ к нрижим-за-хвату, в .который введены пружинный, компенсатор и подпружиненный сбрасыватель со сквозным отверстием, контактная головка во время измереНИИ прибора связана с непожвижным упором, а лрижим-захват закреплен на каретке устройства раскладки с возможностью неремещания к транспортным кассетам, на каретке механнз.ма перемещения которых закреплены
электромагниты, подключенные к блоку па.мяти, лррюод каретки сое|динен с программным датчиком, ВЫХО.ДЫ которого .поаключе.ны к блоку памяти и приводу.
Источ1НИки информации, .принятые во внимание .при экспертизе:
1. Патент США Л 3601699, кл. 324-158Г, опублнк. il97il.
2. Патент Англии № 1325016, кл. HIK, опублик. 1973.
42
.2
11
fi -A
Ч
10
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ СВАРКИ | 1972 |
|
SU418298A1 |
| Установка для пайки выводов полупроводниковых приборов | 1982 |
|
SU1031660A1 |
| Устройство для сортировки полупроводниковых приборов по электрическим параметрам | 1980 |
|
SU1014072A1 |
| Устройство для присоединения кристаллов | 1979 |
|
SU790037A1 |
| Устройство для контроля и разбраковкиРАдиОэлЕМЕНТОВ | 1979 |
|
SU805451A1 |
| Классификатор полупроводниковых приборов | 1976 |
|
SU995160A1 |
| Устройство для загрузки изделий, преимущественно оснований корпусов интегральных схем, в кассеты | 1989 |
|
SU1762431A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно микросхем | 1989 |
|
SU1785086A1 |
| ЛИНИЯ КОНТРОЛЯ И РАЗБРАКОВКИ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2003 |
|
RU2256248C2 |
| Устройство для технического контроля и отбраковки ламп накаливания | 1976 |
|
SU652628A1 |