1
Изобретение относится к конструкциям автоматов для классификации полупроводниковых приборов, преимущественно диодов, предназначено для измерения их электрических параметров, логической обработки результатов измерения и автоматической раскладки измеренных приборов в приемные бункеры, соответствующие группам классификации, и может применяться в радиоэлектронной промыщленности.
Известны классификаторы, содержащие многопозиционные узлы подключения 1.,
Однако соединение клемм испытательных панелей узлов подключения с измерительным устройством производится периодически прижимающимся или скользящим контактом, что значительно усложняет конструкцию и снижает надежность всего классификатора.
Известны классификаторы, содержащие двухпозиционные узлы подключения 2.
Такие узлы проще многопозиционных, однако для измерения параметров приборов также необходимы переключения измерительного устройства с одной испытательной панели на другую. Привод таких узлов реверсивен и работает в импульсном режиме, поэтому такие узлы сложны по конструкции и малонадежны.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является классификатор, содержащий блок измерения, соединенный с ним блок логики, связанный с узлом раскладки, узел подключения, соединенный с блоком измерения и включающий транспортирующий элемент в виде, желоба с элементом фиксации в виде подвижного держателя приборов и неподвижный контактньгй блок с подпружиненными контактами 3.
Однако выполнение транспортирующего элемента узла подключения в виде желоба 15 с подвижным держателем приборов, а контактов этого узла подвижными требует введения отдельных приборов для контактов и держателя, которые определяют дикл работы узла подключения, состоящий из семи этапов последовательных движений его элементов. Это усложняет работу классификатора, снижая надежность.
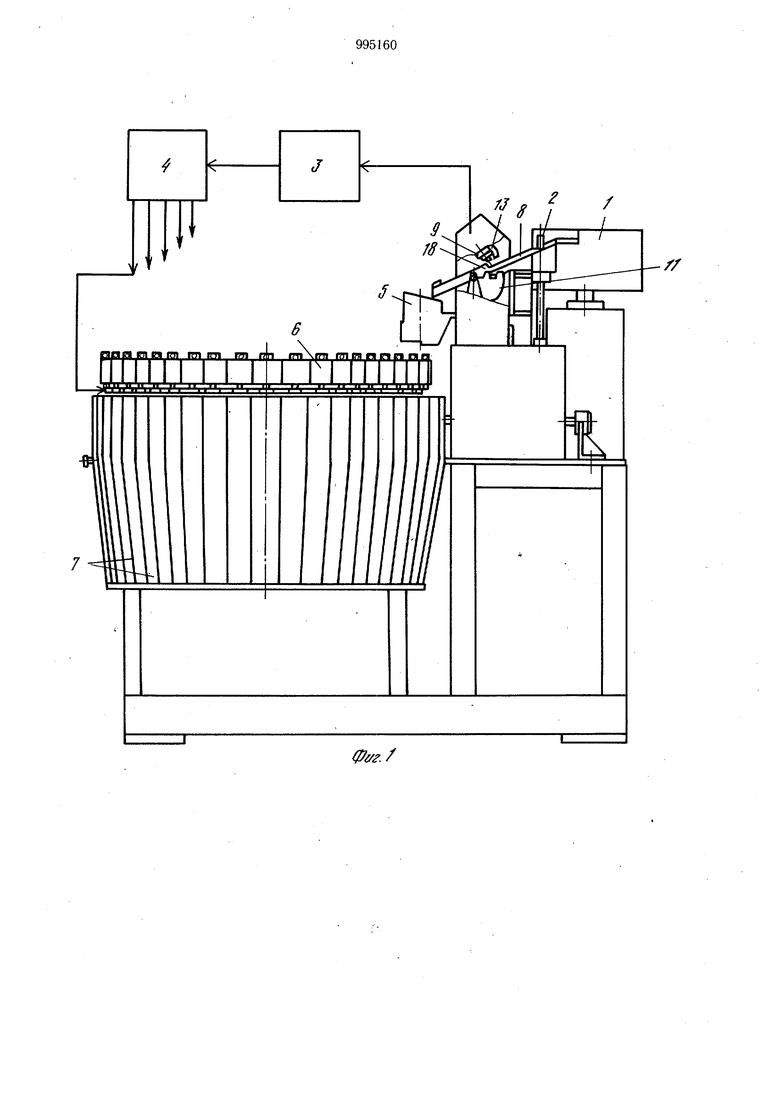
Кроме этого, подобное выполнение узла подключения снижает быстродействие классификатора в целом, так как измерение одного полупроводникового прибора не совмещено но времени с транспортированием другого прибора по желобу. Новый прибор выдается, отсекателем только после измерения предыдущего прибора и его эвакуации с желоба в механизм сортировки. Эвакуация производится по сигналу .со схемы измерения (с логикой) только, после поворота трубы механизма сортировки до бункера-накопителя, соответствующего замеренной группе классификации, и после срабатывания подВИЛ4НОГО держателя, освобождающего прибор. . Наличие двухкантактной -схемы подключения прибора на измерительной позиции приводит к необходимости объединения измеритёльной и силовой цепей, что снижает точность измерения. Цель изобретения - повыщение быстродействия и надежности работы. Поставленная цель достигается тем, что классификатор полупроводниковых приборов, содержащий блок измерения, соединен ный с логическим блоком, соединенным с узлом раскладки, узел подключения, соединенный с блоком измерения и включающий лоток с элементом, фиксации и неподвижный контактный блок с подпружиненными конта,к-тами, снабжен съемником приборов, расположенным в узле подключения, выполHeHijbiM в виде подвижного вилкообразного захвата с щечками, причем щечки расположены с обеих сторон лотка, а в месте расположения элемента фиксации в щечках выполнены выемки, при этом контактный блок и съемник расположены над элементом фиксации. На фиг. 1 изображена конструктивная схема, классификатора; на фиг. 2 - узел подключения. Классификатор полупроводниковых приборов содержит вибробункер 1, механизм 2 поштучной выдачи с отсекателем, блок 3 измерё:ния, соединенный с логическим блоком 4, и узел подключения приборов к блоку 3 измерения. Классификатор включает также узел сортировки измеренных приборов в тару, включающий перегрузочную емкость 5 и узел 6 раскладки карусельного типа, п управляющих элементов которого соединены с соответствующими каналами логического блока 4, а также бункеры-накопители 7 и привод. Узел подключения (фиг. 2) содержит транспортирующий элемент в виде лотка 8, контактный блок с измерительными контактами 9, подпружиненными пружинами 10, а также подвижный вилкообразный захват II приборов с боконьши кромками 12, выполненный. Например, из изоляционного материала, и подвижный съемник приборов с захвата 11, выполненный, например, в виде собачки 13, подпружиненной пружиной 14. Лоток 8, имеющий у выхода (на одной из боковых стенок) выступ 15, может быть выполнен двухступенчатым со ступенями 16 и 17, причем ступень 17, расположенная к выходу лотка 8, поднята по отнощению к ступени 16. Переход ступеней является уступом, 18 лотка 8. Уступ 18 как элемент фиксации может быть также образован либо перегородкой, расположенной поперек лотка 8, либо выемкой, образующей на нем ступень. Щечки 19 захвата 11 имеют призмообразные выемки 20 и охватывают лоток 8 в месте расположения элемента фиксации- уступа 18, а контактный блок, закрепленный неподвижно, и подвижный съемник смонтирован над уступом 18. Щечки 19 могут быть выполнены из токопроводящего материалаУступом 18 лотка 8 могут служить боковые грани 21 выемок 20 у щечек 19, расположенные На пути движения прибора по лотку 8. Выполнение захвата из изоляционного материала, а его щечек из токопроводящего позволяет осуществить четырехконтактную схему подключения прибора на измерительной позиции: подключение питания к прибору через щечки захвата, а измерительных схем через контактный блок. Такое разделение силовой и измерительной цепей исключает влияние силовой цепи на погрещность измерения, что повышает точность контроля параметров. Классификатор полупроводниковых приборов работает следующим образом, Приборы загружаются в вибробункер 1, который обеспечивает в классификаторе подачу приборов, ориентированных определенным образом. В исходном положении отсекатель механизма 2 пощтучной выдачи и захват 11 находятся в крайнем нижнем положении. Вибробункер 1 подает первый прибор в отсекатель, после чего последний с первым прибором и захват 11 поднимаются. При этом первый прибор выкатывается на лоток 8 и скатывается по ступени 16 до упора, образованного боковыми кромками 12 захвата (до первой позиции выстоя), а захват 11 соверщает холостой ход. После выдержки в крайнем верхнем положении отсекатель механизма 2 поштучной выдачи и захват 11 опускаются. При этом боковые кромки 12 захвата 11 освобождают первый прибор, который скатывается под действием силы тяжести по ступени 16 лотка 8 до уступа 18 (до второй позиции выстоя). При опускании отсекателя в крайнее нижнее положение -второй прибор закатывается в него. Таким образом, в конце первого цикла первый прибор стоит около уступа 18, а второй прибор скатился в отсекатель. После выдержки в крайнем нижнем положении отсекатель механизма 2 пощтучной выдачи с вторым прибором и захват 11 поднимаются. При этом второй прибор выкатывается на лоток 8, а щечки 19 захвата 11 своими выемками 20 захватывают с второй позиции выстоя первый прибор, который отжимает вправо собачку 13 съемника и далее транспортируется к измерительным контактам 9. Первый удерживается у измерительных контактов 9 с помощью щечек 19 захвата 11. В этом положении производится измерение параметров первого прибора, а второй прибор при этом перемещается до боковых кромок 12 захвата, 11 (до первой позиции выстоя). В этот момент отсекатель механизм.а 2 поштучной выдачи стоит в крайнем верхнем положении, а собачка 13 съемника в исходном положении (в левом).
После окончаний измерения захват 11 опускается, освобождая измеренный первый прибор от измерительных контактов 9. Затем первый прибор выгружается из захвата И с помощью собачки 13 съемника, направляющей его на ступень 17 лотка 8. В результате прибор падает на эту ступень и под действием силы тяжести скатывается до выхода лотка 8, где с помощью выступа 15 разворачивается в вертикальное положение. Далее прибор падает в перегрузочную емкость 5 узла сортировки, а из нее в ориентированном вертикальном положении в узел 6 раскладки.
Одновременно с выгрузко# первого прибора второй прибор перемещает до боковых кромок 12 захвата 11, отсекатель механизма 2 пощтучной выдачи опускается и третий прибор закатывается в него.
При измерении прибора сигналы об измеренных параметрах поступают через измерительные контакты 9 в блок 3 измерений и далее обрабатываются логическим блоком 4. Затем по соответствующему каналу логического блока 4 подается сигнал управления на один из п управляющих элементов узла 6 раскладки, который доставляет измеренный прибор к бункеру-накопителю 7, соответствующему замеренной группе классификации.
Конструкция предлагаемого классификатора, позволяющая совмещать время измерения одного прибора с временем транспортирования по лотку на позицию замера другого прибора и осуществлять непрерывную раскладку приборов в бункеры-накопители, обеспечивает высокую производительность устройства - 3600 щт/ч при увеличении числа групп классификации до 44.
Формула изобретения
Классификатор полупроводниковых приборов, содержащий блок измерения, соединенный с логическим блоком, соединенным с узлом раскладки, узел подключения, соединенный с блоком измерения и включающий лоток с элментом фиксации и неподвижный контактный блок с подпружиненными контактами, отличающийся тем, что, с целью повыщения быстродействия и надежности работы, он снабжен съемником приборов, расположенным в узле подключения,
выполненным в виде подвижного вилкообразного захвата с щечками, причем щечки расположены с обеих сторон лотка а в месте расположения элемента фиксации в щечках выполнены выемки, при этом контактный блок и съемник расположены над элементом фиксации.
Источники информации, принятые во внимание при экспертизе 1. Патент Японии № 44-3181, кл. Н 01 L 7/00, опублик. 10.02.69. 2. Авторское свидетельство СССР № 296180, кл. Н 01 L 21/66, 14.07.69.
3. Паспорт УЖ 2.532.001 П. Автомат классификации стабилитронов по напряжению стабилизации Ист. 1966 (прототип).
фуг./
фуг.

| название | год | авторы | номер документа |
|---|---|---|---|
| Классификатор полупроводниковых приборов | 1972 |
|
SU470020A1 |
| Классификатор полупроводниковых приборов | 1974 |
|
SU548911A1 |
| КЛАССИФИКАТОР ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1971 |
|
SU296180A1 |
| АВТОМАТ ДЛЯ РАЗБРАКОВКИ ПОЛУПРОВОДНИКОВЫХ | 1973 |
|
SU390601A1 |
| Автомат для разбраковки полупроводниковых приборов | 1975 |
|
SU561234A1 |
| Устройство для автоматической разбраковки радиодеталей с гибкими выводами | 1980 |
|
SU894822A1 |
| Устройство для механических испытаний и разбраковки полупроводниковых приборов | 1979 |
|
SU911655A1 |
| Устройство для сортировки полупроводниковых приборов по электрическим параметрам | 1980 |
|
SU1014072A1 |
| Классификатор полупроводниковых приборов | 1975 |
|
SU565338A1 |
| Автомат для контроля и сортировки деталей по размерам | 1972 |
|
SU471130A1 |