перемещения, подключенный к преобразователю «перемещение-напряжение, и второй блок сравнения, один из входов которото через блок памяти соединен с устройством ввода программы, а выход второго блока сравнения подключен ко входу устройства управления 3.
Недостатками такой системы являются ограничение точности отслеживания перемещений в результате того, что определение ошибок подачи производится по отклонениям скорости, определяемой цифровым тахометром, без учета ошибок перемещений, система регулирования скорости подачи не выдает импульсов, компенсирующих ошибки перемещения, а только разрешает формирование импульсов команд при отрицательном содержании блока ошибки, регулирование скорости подачи ло каждой оси координат производится путем ускорения или замедления скорости подач по всем осям координат одновременно. Система нуждается в интерполяторе, что усложняет систему и снижает ее надежность.
Целью изобретения является повышение точности и надежности контурной системы программного управления.
Поставленная цель достигается тем, что в систему введены функциональный преобразователь, вход которого подключен к устройству ввода программы, последовательно соединепные первый инвертор и первый сзмматор, коммутатор и второй инвертор и по каждой координате третий и четвертый блоки сравнения и второй сумматор, подключенный к функциональному преобразователю и задатчику скорости, выход второго сумматора по каждой координате через .последовательно соединенные первый блок сравнения и третий блок сравнения, подключенный к устройству регулирования скорости данной координаты, подсоединен к блоку управления исполнительным органом, причем выход второго сумматора соединен со входом четвертого блока сравнения, подключенного к преобразователю «перемещение-напряжение данной координаты, вход первого сумматора и выход второго инвертора соединены соответственно с выходом четвертого и входом третьего блоков сравнения одной координаты, а выход коммутатора и вход первого инвертора подключены соответственно к выходу четвертого и входу третьего блоков сравнения другой координаты, причем выход устройства управления соединен со входами функционального преобразователя, задатчика скорости и по каждой координате - со входами блока памяти, устройства регулирования скорости и устройства фиксации.
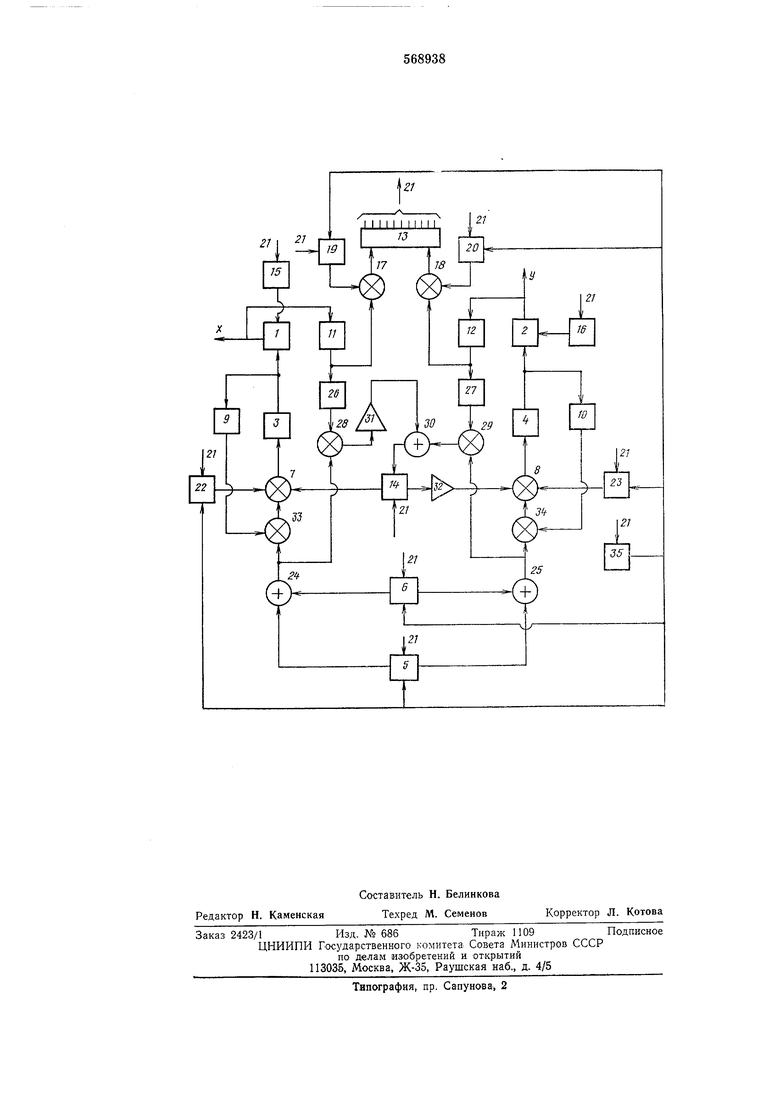
На чертеже .представлена блок-схема двухкоординатной контурной системы программного управления, которая содержит исполнительные органы 1 и 2, блоки 3 и 4 управления и сполнительным органом, задатчик скорости 5, функциональный преобразователь б, третьи йлоки сравнения 7 и 8, датчики скорости 9 и 10, датчики перемещения И и 12, устройство управления 13, коммутатор 14, устройства фиксации 15 и 16, вторые блоки сравнения 17 и 18, блоки памяти 19 и 20, соединения 21 устройства управления с блоками системы, устройства регулирования скорости 22 и 23, вторые сумматоры 24 и 25, преобразователи «перемещение-напряжение 26 и .27, четвертые блоки сравнения 28 и 29, первый сумматор 30, первый инвертор 31, второй инвертор 32, первые блоки сравнения 33 и 34, устройство ввода программы 35.
Система работает следующим образом. При прямолинейных траекторных перемещениях исполнительного органа станка по осям координат управляющий ток может подаваться в каналы регулирования как одновременно, так и раздельно. Скорость перемещения исполнительных органов 1 и 2, например двух
гидродвигателей, в ортогональных координатных направлениях регулируется блоками 3, 4 управления исполнительными органами, например управляемыми дросселями гидросистем, приводимыми в действие электроприводами постоянного тока, параметры которого регулируются задатчиком скорости 5, получающим команды от устройства управления
13на соответствующее изменение напряжения управляющего тока. При прямоли}1ейных траекторных перемещениях цепи обратной связи отдатчиков 11 и 12 разобщены коммутатором
14и параметры управляющего тока, подаваемого задатчиком скорости 5 на блоки управления 3 и 4, корректируются только датчиками скорости 9 и 10, например датчиками давления жидкости в гидросистемах гидроприводов. В этом случае блоки 3, 4 питаются током, параметры которого пропорциональны производной от ошибки перемещения, то есть пропорциональны изменению скорости перемещения, и стабилизируют таким образом скорость движения исполнительного органа в каждом координатном направлении. При раздельном поочередном функционировании каналов регулирования в процессе позиционирования органов станка смещение нефункционирующего исполнительного органа 1 или 2 предотвращается его закреплением устройством фиксации 15 или 16 по команде устройства управления 13.
В процессе перемещений датчики перемещения И и 12 выдают ток на вторые блоки сравнения 17, 18, функционально связанные с блоками памяти 19, 20.
При программировании требуемых перемещений в каждом переходе технологической операции ячейки блока памяти настраиваются на соответствующее количество импульсов, ко-торые в процессе функционирования системы
через преобразователи, содержащиеся в блоках 19, 20, сравниваются с поступающими от датчика 11 или ,12. При переходе в сбалансированное состояние блоки сравнения 17 и 18 выдают управляющие команды устройству
управления 13, которое, в свою очередь, выдает команды: задатчику 5 - обесточить каналы регулирования; устройствам фиксации 15, 16 - закрепить исполнительные органы 1 и 2; блокам памяти 19, 20 - подключить к сравнения 17, 18 ячейки памяти перемещений в последующем переходе технологической операции; коммутатору 14 - разобщить или соединить сумматор 30 с блоками сравнения 7, 8; устройству 35 - подать очеpeiHvio программу работы блоков системы. Стабильные, но различные (пропорциональные) СКОРОСТИ движения исполнительных органов при воспроизведении прямолинейных траекторных перемещений органов станка, наКЛОНТ5ЫХ относительно координатных осей X, у. обеспечиваются включением зстройством 13 в плечо блока сравнения 7 или 8 соответствуюнгего резистора устройства регулирования скорости 22 или 23. Ппи управлении КОНТУРНЫМИ перемещениями по командам устройства управления 13 задатчик 5 и функниональный преобразователь 6подключаются в цепь питания, а коммутатор 14 подключает цепи обратной связи от датчиков 11, 12 к третьим блокам сравнения По команде устройства 13 устройства регулирования скорости 22 и 23 автоматически ПРИВОДЯТ в равновесное состояние (балансируют) мостовые схемы блоков сравнения 7 и 8, функциональный ппеобразователь 6 подключается к сумматорам 24, 25 и обеспечивает изменение управляющего тока по требуемой математической функции. Блоки 7 и 8 начинают выдавать токи иитания блокам управления 3, 4 переменного напряжения по тем ФУНКЦИЯМ, которые ВОСПРОИЗВОДИТ преобразователь 6. Например, если преобразователь воспроизводит изменение параметров тока в КРУГОВЫХ функциях «синус-косинус, то скорость перемещения исполнительного органа по оси X будет: U - UT:- sin ш/, а скорость по оси У: и у - UT cos wf. В результате сложения этих скоростей исполнительный орган станка будет иметь траекторией движения окружность. Эллиптические кривые исполнительный орган станка будет описывать, если ПРИ воспроизведении этой же бункпии (круговой) в плечи мостовых схем блоков сравнения 7 и 8 будут введены дополнительные резисторы устройств 22 или 23, устанавливающих в данном случае величины большой или малой полуосей эллипса. Радиусы КРИВИЗНЫ полученных траекторий перемещения определяются скоростью изменения напряжения управляющего тока, выдаваемого в каналы регулирования функциональным преобразователем 6, величина вектора скорости (скорость подачи исполнительного органа по этой траектории движения) устанавливается задатчиком скорости 5. Длина траекторных перемещений по каждой координате ограничивается системами отсчета перемещений, описанными вьипе. Для исключения рассогласования скоростей координатных перемещений исполнительных органов 1 и 2, которые могут возникнуть в результате колебаний внещних нагрузок на .приводы, система снабжена цепью обратной связи датчиков перемещения И и 12 с блоками сравнения 7 и 8 через преобразователи 26, 27 параметров тока до уровня управляющего тока, блоки сравнения 28, 29, сумматор 30, инверторы 31, 32 и через коммутатор 14. Ввиду того, что параметры тока управления в каждом канале регулирования корректируются датчиками 9 и 10 по СКОРОСТИ слежения через первые блоки сравнения 33 и 34, датчики перемещения 11 и 12 выдают на блоки сравнения 28, 29 ток. параметры которого пропорциональны ощибке перемещения каждого исполнительного органа I и 2 и производной от этой ощибки, т. е. пропорциональны изменениям скорости перемещения. Блоки 28, 29 сравнивают эти параметры с параметрами тока питания контуров регулирования и выдают иа сумматор 30 сигналы, пропорциональные ошибкам слежения по каждому контуру регулирования. В результате наличия в цепи датчика 11 инвертора 31 сУМматор 30 ПРОИЗВОДИТ алгебраическое действие суммирования и выдает через коммутатор 14 корректирующий импульс. Использование инвертора 32 обеспечивает подачу на блоки сравнения 7 и 8 импульса противоположного знака, что повыщает быстродействие системы регулирования. Если в результате внещних воздействий СКОРОСТЬ движения органа 1 снижается, соответственно снижается и скорость движения органа 2 и исполнительный орган станка продолжает движение ПО заданной траектории. Таким образом, предлагаемая система, в отличие от известных, является замкнутой по каналам регулирования. Все параметры функнионирования системы в каждом переходе технологической операции устанавливаются устройством ввода программы 35. например электронной вычислительной машиной, которое разрабатывает технологический процесс выполнения операции на станке и засылает в запоминающие устройства: из блока 13 - программу последовательности действия всех элементов системы; блоков 19, 20 - программу величин перемещений: блоков 5. В. 22. 23- программу режимов обработки. Применение данной системы праграммного управления позволяет повысить точность и расщирить функциональные возможности систем управления, автоматически программировать процессы обработки гговерхностей криволинейной ФОРМЫ без применения дорогостоящего оборудования (интерполяторов и др.), цифровых и копировальных систем управления и значительно сокращает количество электрической и электронной аппаратуры
в системе, повышает надежность, сокращает стоимость и габаритные размеры.
Формула изобретения
Контурная система программного управления, содержащая устройство ввода программы, подключенное к задатчику скорости, устройство управления и по каждой координате устройство регулирования скорости, подключенное к устройству ввода программы, и последовательно соединенные блок управления исполнительным органом, подключенный через датчик скорости к первому блоку сравнения, исполнительный орган, соединенный с устройством фиксации, датчик перемещения, подключенный к преобразователю «перемещение-напряжение, и второй блок соавнения, один из входов которого через блок памяти соединен с устройством ввода программы, а выход второго блока сравнения подключен ко входу устройства управления, отличающаяся тем, что, с целью повышения точности и надежности системы, в нее введены функциональный преобразователь, вход которого подключен к устройству ввода программы, последовательно соединенные первый инвертор и первый сумматор, коммутатор и второй инвертор и по каждой координате третий и четвертый блоки сравнения и второй сумматор, подключенный к функциональному преобразователю и задатчику скорости, выход
второго сумматора по каждой координате через последовательно соединенные первый блок сравнения и третий блок сравнения, подключенный к устройству регулирования скорости
данной координаты, подсоединен к блоку управления исполнительным органом, причем выход второго сумматора соединен со входом четвертого блока сравнения, подключенного к преобразователю «перемещение - напряжение данной координаты, вход первого сумматора и выход второго инвертора соединены соответственно с выходом четвертого и входом третьего блоков сравнения одной координаты, а выход коммутатора и вход первого
инвертора подключены соответственно к выходу четвертого и входу третьего блоков сравнения другой координаты, причем выход устройства управления соединен со входами функционального преобразователя, задатчика
скорости и по каждой координате - со входами блока памяти, устройства регулирования СКОРОСТИ и устройства фиксации.
Источники информации, принятые во внимание при экспертизе
1. Сборник «Контурные системы числового управления и их элементы, М., «Машиностроение, 1972 г., С. 25-29.
2. Патент США № 3619582, кл. , 1971 г.
3. Патент США № 3792333, кл. 318-571, 1974 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
| Устройство индикации и управления для станков | 1985 |
|
SU1287112A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Многоканальное устройство для управления следящими приводами | 1977 |
|
SU691809A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Система управления | 1981 |
|
SU996995A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2011 |
|
RU2494006C2 |