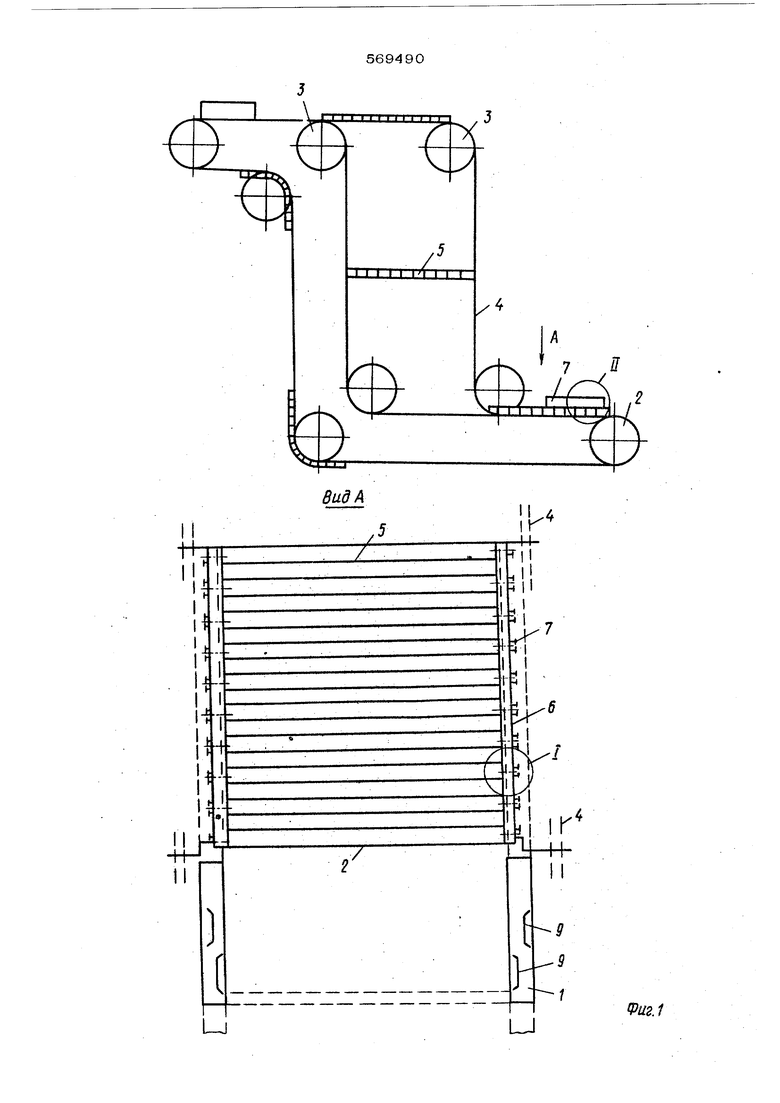
их двумя парами бесконечно-замкнутых тяго вых цепей 4.
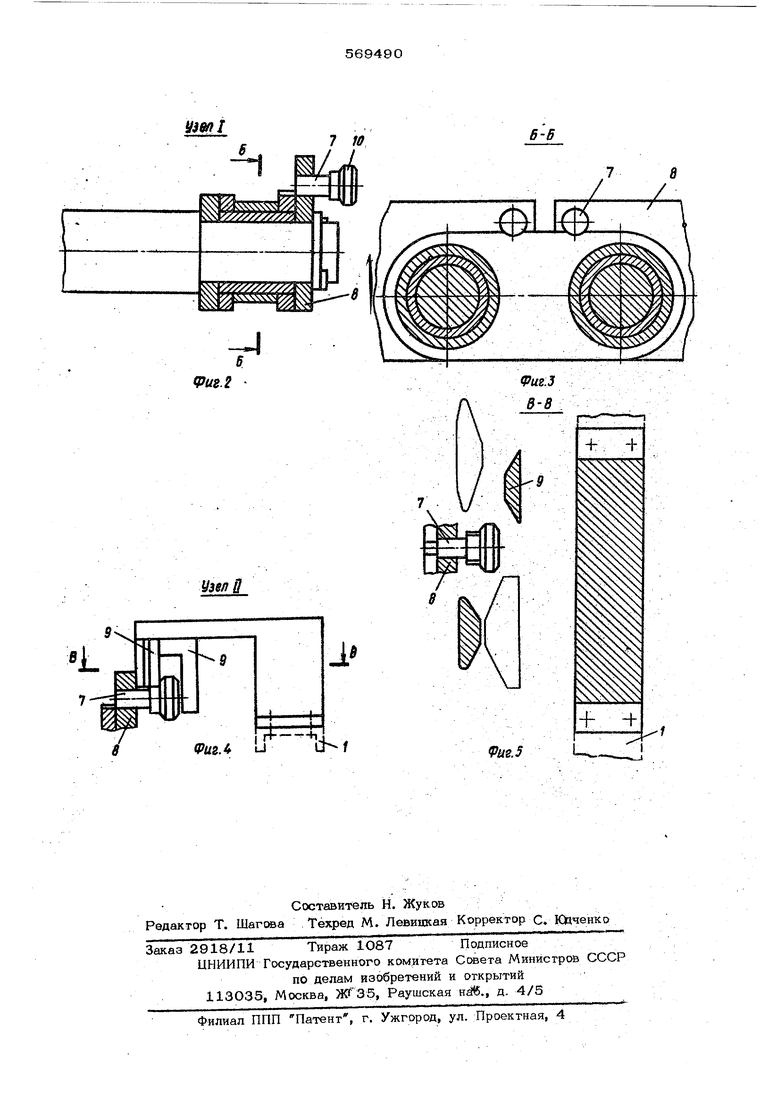
К последним прикреплены грузонесущие платформы 5, состоящие из параллельных Етержней, концы которых закреплены на гиб Kros параллельных I элементах, выполненных в виде втулочно-роликовых цепей 6, положение звеньев которых фиксируются с помо. ,щью механизма управления положением одного звена Ътносйтельно другого.Механизм управления состоит из фиксаторов, выполиенвых в виде пальцев 7, установленных а отверстиях внешней пластины S втулЬч;во роликовых цепей 6, и копирных направляю ших 9, установленных на раме 1 перед и после грузовых участков конвейера с возможностью взаимодействия с головками 10 и выполненных на пальцах 7.
Конвейер работает следующим образом.
При переходе платформы 5 на грузовой участок конвейера копирные направ;1яюш;ие 9, взаимодействуя с головками 10 пальцев 7, утапливают последние в пластины 8, фик сируя их от поворота относительно внутренних пластин. При этом из параллельных стержней; свяааннь1х1с пластинами цепей 6, образуется жёсткий настил. По окончании грузового участка копирные направляющие 9 выдвигают йз пластин 8 пальцы 7, в ре
зультате чего вгулочно-роликовая цепь 6 изгибается в обоих направлениях.
формула изобретения Вертикальный конвейер, содержащий раяу с установленными на ней приводными и отклоняющими звездочками, обхватывающие ,их две пары бесконечно замкнутых тяговых .цепей, прикрепленные к ним грузонесущие платформы, состоящие из параллельных стержней, концы которых закреплены на гибкий параллельных элементах, составленных из отдельных звеньев, соединенных между собой осями, и механизм управления положением звеньев одного относительно другого, -состоящий из фиксаторов, установленных на гибких элементах, и копирных направляющих, установленных на раме перед и после грузового участка с возможностью взаимодействия с фиксаторами, о т л и ч а щ и и с я тем, что, с целью упрощения механизма управления положением звеньев,, гибкие элементы выполнены в виде втулочно-роликовых цепей, внешние пластины каждой из которых выполнены с отверстиями, а каждый из фиксаторов выполнен в виде взаимодействующего с внутренней пластиной пальца, имеющего головку для взаимодейст ВИЯ с копирными направляющими, и устанснэ- лен в отверстии внешней пластины.
I 1 I ГГ
V
/
ЕСГГПЕЕПО

| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный конвейер | 1983 |
|
SU1098870A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩЕГО СРЕДСТВА С ГРУЗОВОЙ ПЛАТФОРМЫ ПОДЪЕМНИКА НА ПЛОЩАДКУ ПОГРУЗКИ-РАЗГРУЗКИ | 1999 |
|
RU2152340C1 |
| Транспортная тележка автоматической линии | 1985 |
|
SU1414562A1 |
| Вертикальный цепной конвейер для транспортирования штучных грузов | 1982 |
|
SU1071537A1 |
| Грузонесущий орган пластинчатого конвейера | 1978 |
|
SU908678A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1258782A1 |
| Тележечный конвейер | 1983 |
|
SU1131782A1 |
| Устройство для кошения, сбора и взвешивания биологического урожая с опытных участков | 1990 |
|
SU1732851A1 |
| Вертикальная конвейерная система для штучных грузов | 1985 |
|
SU1680599A1 |
у
:i.l I 1|-Аш
ч
U
./
LJ ФигЛ LJ
