(54) УСТРОЙСТВО ДЛЯ ДОСЫЛАНИЯ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
| Скороморозильный аппарат для упакованных пищевых продуктов на поддонах | 1985 |
|
SU1330427A1 |
| Установка для укладки строительных из-дЕлий B КОНТЕйНЕРы | 1979 |
|
SU850398A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Технологическая линия для изготовления строительных изделий | 1985 |
|
SU1296430A1 |
| Установка для формования бетонных изделий на поддонах | 1990 |
|
SU1763189A1 |
| Устройство для загрузки поддонов | 1980 |
|
SU943511A1 |
| Установка для съема поддонов с вагонетки и подачи в автомат-укладчик | 1976 |
|
SU583055A1 |
| ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КЕРАМЗИТОБЕТОННЫХ БЛОКОВ | 1995 |
|
RU2078690C1 |
| Устройство для упаковки штучных изделий в картонные коробки | 1986 |
|
SU1458279A1 |
Изобретение касается мехавизаиви про цессов в деревообраба-гывающем производстве, а именно при производста® паркетных досок для полного досылания поййона: в загрузочную этажерку.5
Известно устройство для транспортирования и передачи штучных грузов, в котором столы выдачи и приема снабжены фрикционными роликами, установле гаымй на осях ба рабанов, я взаимодействуют с нвправлшоши- ю ми, установленнымя на опорной раме. Воэврашение столов в исходное положение прои&водится с помсаяыо- мехашгзма выполненного в вяде каната с грузом Ij.
Недостатком yeaaafmoro устройства явл{Ы5 ется неполное досылание грузов.
Наиболее близким по своему тохнйчесхо му решению к предлагаемому изобретению является устройство для перегрузки листовых . матер1шлов, состоящее из подъемно-onyci - 20 ного- механизма и механизма горивонталь- ного неремешеиия грузов с приводом от Гй ропвлшшров, выполненного в виде равлы с реечными захватами 21.
Известное устройство не обеспечивает 25
точного и наяенсного досыпания поЯДопа, поэтому в каждом отдельном случав требу атся дополмительгтый привод.
Целью изобретения является обеспечение точного и полного досылания поддона в загрузочную этажер.чу.
Достигается это тем, что устройство снабжено кареткой, шартфно соединенной с рамой и с механизмом возврага, контакт -. руюшей с захватами конвейера и размеше ной на копире, прн этом свободные концы штанг снабжены камерами, выполненными с отве1)стиями для поступления и выхода воздха, а толкатели имеют направляющие и кон« тактирующие с ними ролики.
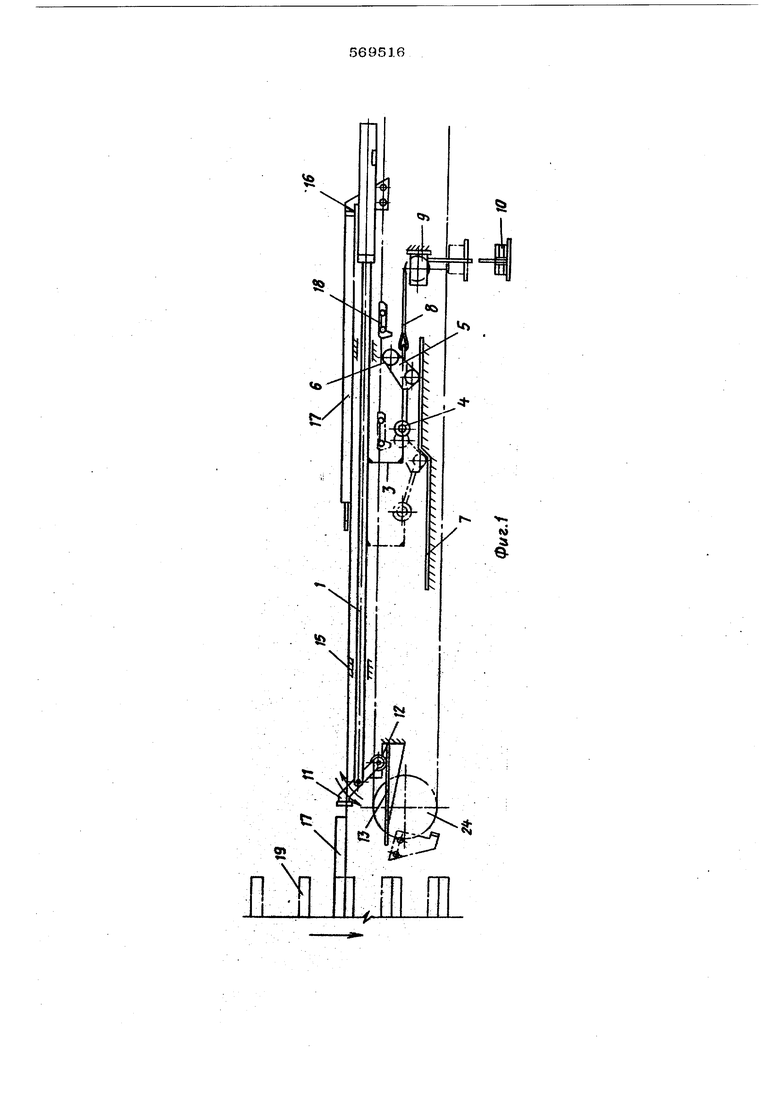
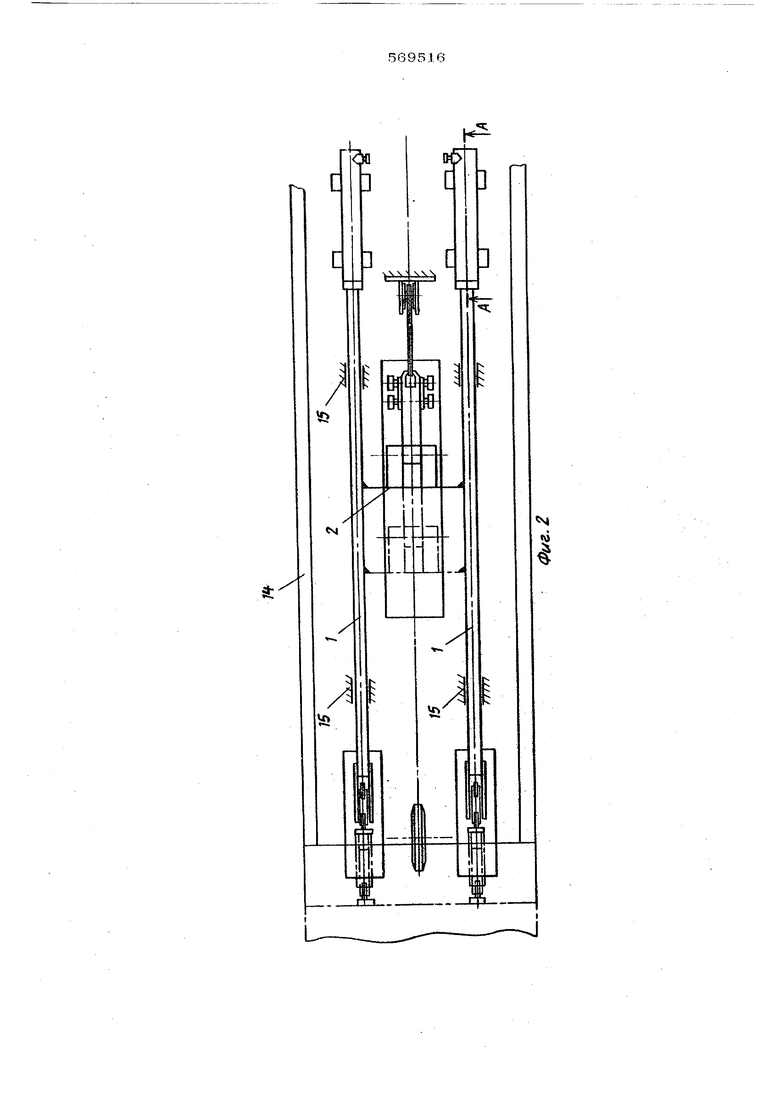
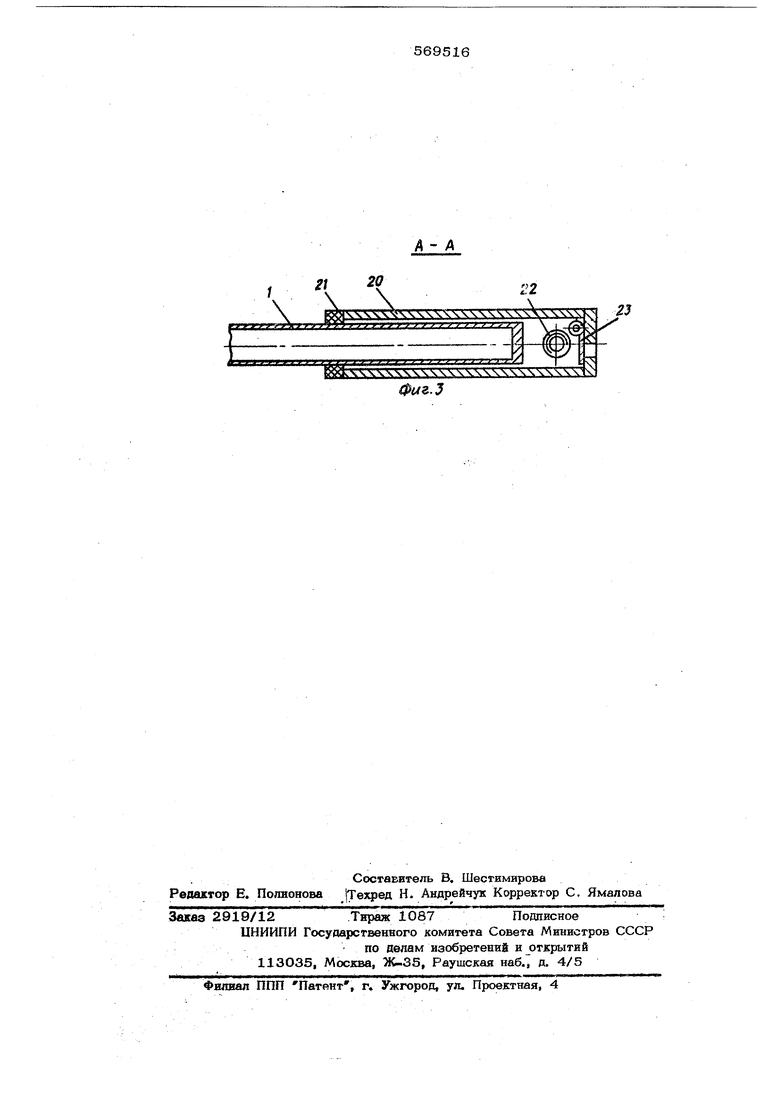
На фиг. 1 изображено пpeдлaгae ioe устройство, вид сбоку на фиг. 2 - то же, вид в плане; на фиг. 3 «- разрез А-А на фиг, 2,
Устройство состоит из двух штанг 1, жестко спаренных между собой звеном 2 С кронштейном 3, , который при помощи шарнира 4 соединен с кареткой 5, нмепшей ро- лики 6 для передвижения (каретка по котяру 7 К каретке 5 прикреплен трос 8, кото|Я й огибает блок 9 а на конне имеет пойвешенный груз 10. На конце каждой иттанги 1 шарнирно укреплены толкатели 11 с роликами 12 для скольжения по направляющим 13 топка тепе и.
На раме 14 цепного конвейера укрепленынаправляющие 15 штанг, копир 7, направпян юшие 13 толкателей и блок 9, на цепи конвейера укреплены упоры 16 поддонов 17 и захваты 18 каретки 5.
Для плавного отхода штанг 1 в исходное; положение после досылания поддонов 17 в этажерку 19 свободные концы штанг заключены в камеры 20, которые закрыты yплor нитепьным кольцом 21 и имеют регулирово ный винт 22 для выхода воздуха и заспонку 23, свободно перекрывающую отверстие в торце камеры 2О для поступления воздуха в камеру.
Устройство работает следующим образом. Очередной поддон 17, подлежащий загрузке в пресс, транспортируется упором 16 пел ного конвейера в накопительную этажерку 19 до того момента, пока при прохождений цепи конвейера вокруг звездочки 24 упор 16 опустится вниз и выйдет из зацепления с поддоном 17, в результате последний остается не полностью поданный в накопительную этажерку.
Одновременно укрепленный на цепи конвейера захват 18, двигается, упирается в каретку 5 и толкает ее вперед. Каретка 5, будучи соединенной через кронштейн 3 со штангами 1, толкает их вперед, причем толкатепи 11, скользя роликами 12 по направ ляющей 13, досыпает поддон 17 в накопительную этажерку 19.
При движении каретки 5 по копиру, она опускаатсй вниз и выходит из зацепления с захватом 18, в результате движение штанг
i прекращается, а поддон 17 полностью загружен в накопительную этажерку. Ось/ божденная от захвата 18 каретка 5 поц действием груза 10 возвращается в схо{: ное положение вместе со штангами 1. Плавный отход каретки 5 со штангами 1 в исходное положение обеспечивается сопротивпением воздуха в закрытой камере 20, выкоа которого ре гулирувтся при помощи регулиро.вочных винтов 22.
Формула изобретения
Устройство для досылания грузов, напр ;мер поддонов, в загрузочную этажерку преоса, включающее грузонесуший пепной ко :вейер с захватами, подвижную раму в виде жестко спаренных штанг, размещенных в направлякших и имеющих с одной стороны толкатели ,на концах, и механизм возврата, в виде троса с грузом, о т л и ч а ю щ е е с и тем, что, с целью обеспечения то, ного и полного досылания поддонов в загрузочную этажерку, оно снабжено кареткой, щарнирно соединенной с рамой в с механизмом возврата, контактирукацей с захватами, конвейера и размещенной на копире, при ; этом свободные штанг снабжены камерами, ш шопненШ}1М11 с отверстиями для itooтуплеггая в выхода воздуха, а толкатели . имеют направляхяше н контакпфующие с н. ми ролики. .,
Источншш информации, приняпле во вни-, мание при экспертизе:
hJc 399436, кя. В 65 ЧЗг 47/00, .
2,Авторское свидетельство СССР № 174130, кл. В 65 М 5/О4, 1963.
