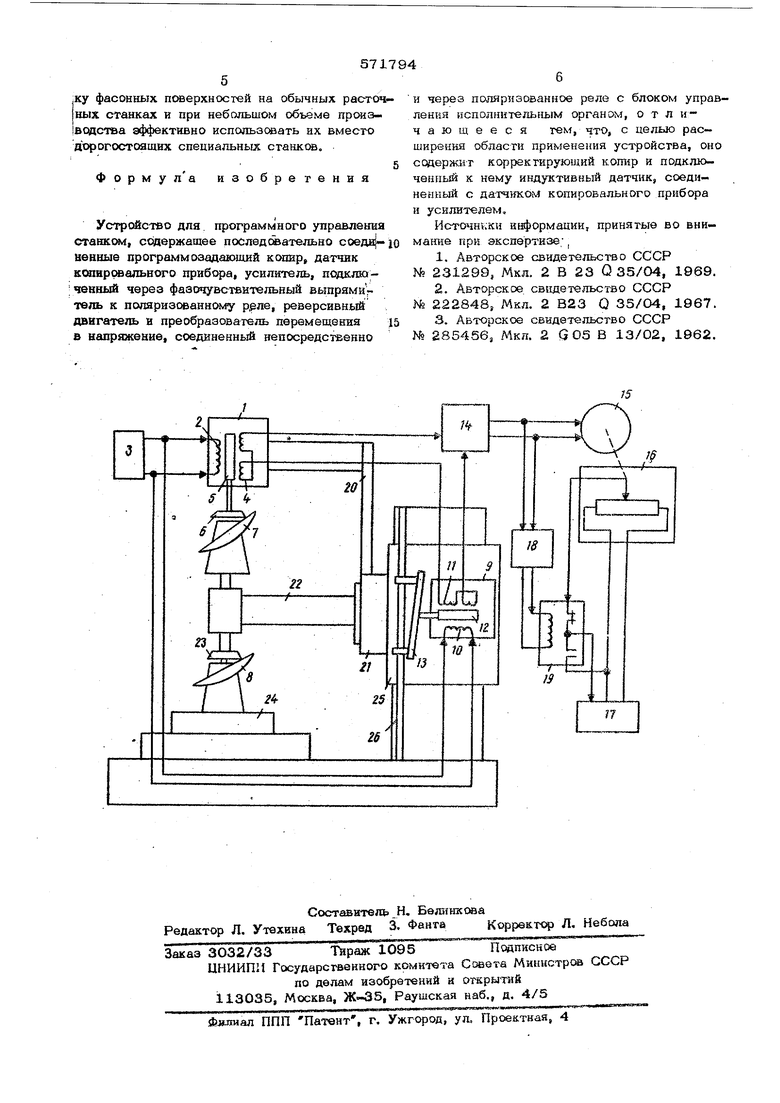
(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ СТАНКОМ ка 3 переменного тока, двухсекционной; втс ичной обмотеи 4 и сердечника 5 со щупом 6, программозадающий копир 7 для обработки изделия 8, индуктивный датчик 9, первичная 10 в вторичная 11 обмотки которого соединены соответственно параллельно и последовательно с первичной j 2 и вторичной 4 обмотками датчика 1, а сердечник 12 вэавмопействует с корректирующим копиром ; 13, усилитель -14, подключенный к обмопсам 4 и 11 н питающий реверсивный I электродвигатель 15, механически связанный с преобразователвм 16 перемещенияв вапряжение, поокяюченвым к блоку 17 управления исполвительным сфганрм ставка, фазочувствительHbd выпрямитель IS, питающий от усилителя 1 поларйзо анное реле j 19, включенное между преобразователем 16 в бпоком управлввиа 17. При примааении устройства ва расточном станке датчик 1 устаиселен на крсшцтейне 20, зшфвялвниом ва радиальнт сугшортв планшайбы 21 ставка, несет фреаервую головку 22 с фразой 23. О абатываамое ваюалиа в и прсяраммозадаххшй копвр 7 уставовлаиы coocBOi ва стопе 24. Датчик О закреплен на шпвщельвой ба&се 25, а ко{ ктирующий коонр 13 на |{аао|авижв( стсЛКе 26. прогрш мвой обработке вертакальвая следящая а зойца сообщается шпнвдельнсА беЛкв 25f а задающая - столу 24. Управление без коррекции производится ори неподвижном сардечнике 12 датчика 9, при атом щуп 6 получает осевое перемещение в соответствии с изменением профиля копира 7. Пря питании от источника 3 обмот ж 2 и 1О в двух ceKOitfHX кеакдой из обмотсас 4 и 11 индуктируются проткв(И10ложво налравлавные ЭДС. Фаза н величина ра ш твруюшай ЭДС вКаждом датчике сяфадвляется напрсфлениам и валичинсЯ смешания аго сердечника от срадвагЬ лопйясевив, при котором рваутлщ уутея:- iSiC. нулю, При неподвижиом , 12 среднаа по ложевие сердечника .0 :в;ёиг1мавв 1М и система улравда|гия: по| и|бржив в1г с некоторой погрещнрстью Ьастроёниоё расстояние между кшироваьпьным роликом 6 и фрезой 23... - ; . , Ивдуктированный в обмотках 4 и 11 ток чарез усилитель 14 витает (электродвигатель 15, ваправление вращевия которого определяется фазой результирующей | ЭДС., т.е. направлением смещения сердечника 5 от его среднего положения. Создаваемое при этом на выходе преобразователя 16 напряжение непосредственно и через контакты реле 19 подается на вход блока управления 17. Тсж, ивдуктированньй в обмотках 4 и И через усилитель 14 и выпрямитель 18 питает также реле 19, контакты которого переключаются при изменении полйрности напряжения на выходе выпрямителя 18, определяемоЗ направлением смещения сердечни-г ка 5. Реле 19 включено в электрическую цепь так, что при согласованных направле- ниях следящей подачи шпиндельной бабки 25 н смещения сердечника 5jH его среднем .положении замкнут нормально открытый контакт реле 19. При рассогласовании направлений следящей подачи и смещения сердечника 5 замыкается нормально открытый кодтакт реле 19, .следящая подача автоматически выключается и напряжение на выходе блока 17 становится равным нулю, В результате двигкения копира 7 восстанавливается соответствие наоравлен й: смещения сердечввка 5 н следящей подачи шпинаельной бабки 25, размыкается нормально Открытый контакт реле 19, авт жатаческв включается следящая аоаача, н двигатель 15 устанавли-., вает преобразователь 16 в положение требуемой величины следящей подачи. Таким образом, обеспечивается с определенной погрещностью соответствие тра&ктс вЬ .фреаы 23 и копировального ролика 6. При управлении с коррекцией программы, заданной копиром 7, при движении щпиндельной бабки 25 от коррек71хрующего кспкра 13 сообщается осевое перемещение сердечвику датчика 9. Так как обмотки-4 и 11 датчиков 1 и 9 соединены последовательно, то смещение сердечника 12 вызывает изменение резу льтирующей ЭДС подаваемой ва вход убклителя 14, что равносильно сдвигу ср д сегрй дожения сердечника 5. Offfii Be fpiep j ii -iii eiiie. 12 iiSMe siii ifyt:p f. щупом 6 н фрав1г -;Й;з ;; а(свг:рр«й их. движанвд рйзли П{Ы,ок-фс 1у1(:.|рбра отдиной поверхноств изделия 8 отлкга $01ч::я от. формы копира . 7. .Таким t)6pia3o аЬ одному копиру 7 можно обрабатывать поверхности с заданными отклонениями от его рабочей поверхности. Использование данного устройства управ лвния позволяет компенсировать погрешнооти изготовления программозадающего копира и обрабатываемых заготов ж. При этом обеспечивается возможность, например, из искаженной по щагу винтовой поверхности заготовки грюбного винта обработать годное изделие с допускаемыми отклонениями в шаге от номинала, уменьшить величину припуска и вес заготовок. Kpcnvie того, устройство позволяет производить программную обрабсгрку фасонных поверхностей на обычных расточных станках и при небольшом объеме производства эффективно использовать их вместо дорогостоящих специальных станков,
Форму Л а изобретения
Устройство для программного управления станксж, содержащее послед(жательно соедн|- IQ иевные программозодаюший копир, датчик копировального привела, усилитель, подключенный через фазочувствительный выпрямиг таль к поляризсжанному рэле, реверсивный двигатель и преобразователь перемещения J5 в напряжение, соединенный непосредственно
и через поляризованное реле с блоком управления исполнительным органом, о т л ичающееся тем, что, с целью расширения области применения устройства, оно содержит корректирующий копир и подключен иьй к нему индуктивный датчик, соединенный с да-тчикО1 1 копировального прибора и усилителем.
Источники информации, принятые во внимание при экспертизе;,
1.Авторское свидетельство СССР
№ 231299, Мкл. 2 В 23 Q 35/04, 1969.
2.Авторское свидетельство СССР
NO 222848/Мкл. 2 В23 Q 35/04, 1967.
3.Авторское свидетельство СССР
№ 285456, Мкл. 2 G 05 В 13/02, 1962.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСТОЧНЫЙ СТАНОК | 1968 |
|
SU231299A1 |
| Копирное устройство к давильномуСТАНКу | 1976 |
|
SU816620A1 |
| Электроследящее устройство для двухмерного копирования к копировально-фрезерным станкам | 1950 |
|
SU93332A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПРИВОДАМИ КОПИРОВАЛЬНОГО СТАНКА | 1970 |
|
SU278361A1 |
| Копировальное следящее устройство для станков с программным управлением | 1981 |
|
SU960732A1 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
| Станок для копировальной обработки | 1985 |
|
SU1255391A2 |
| СХЕМА ОГРАНИЧЕНИЯ ВЕЛИЧИНЫ ДИНАМИЧЕСКОЙ ОШИБКИ КОНИРОВАНИЯ | 1968 |
|
SU219992A1 |
| Копировальное устройство для металлорежущихСТАНКОВ | 1979 |
|
SU837767A1 |
| Станок для копировальной обработки | 1985 |
|
SU1288021A1 |
