1
Изобретение относится к измерительной технике, в частности к силоизмерительным устройствам, и может быть использовано для контроля усилия расчленения в процессе сортировки упругих контактных элементов электрических соединений, например при их производстве.
Известно устройство для контроля усилия расчленения элементов электрических соединений, содержащее штырь-калибр, измеритель силы и привод 1. Это устройство имеет низкую производительность.
Наиболее близким к изобретению по технической сущности является устройство для контроля усилия расчленения элементов электрических соединений, содержащее корпус, в котором установлены с возможностью относительного перемещения в горизонтальном и вертикальном направлениях узлы для крепления щтырей-калибров и ответных контролируемых элементов электрических соединений, измеритель СИЛЫ; и приводы 2.
Недостатком этого устройства является низкая производительность процесса контроля.
Для повыщения производительности процесса контроля усилия расчленения элементов электрических соединений в предлагаемом устройстве узлы для крепления щтырей-калибров и ответных контролируемых элементов выполнены в виде размещенных горизонтальНО друг над другом плит, причем плита для крепления калибров связана с корпусом упругими элементами и снабжена вибратором и измерителем амплитуды вибраций, а щтырикалибры размещены со стороны нижней плоскости плиты, против которой в корпусе выполнена полость, сообщающаяся через установленный в корпусе распределитель, например поворотную заслонку с лотком, а в корпусе дополнительно установлены отсекатель с приводом и накопитель, над которым установлен подвижный загружатель с фиксатором, соединенный с дополнительным блоком для подачи контролируемых элементов через подводной канал с ориентатором положения контролируемых элементов.
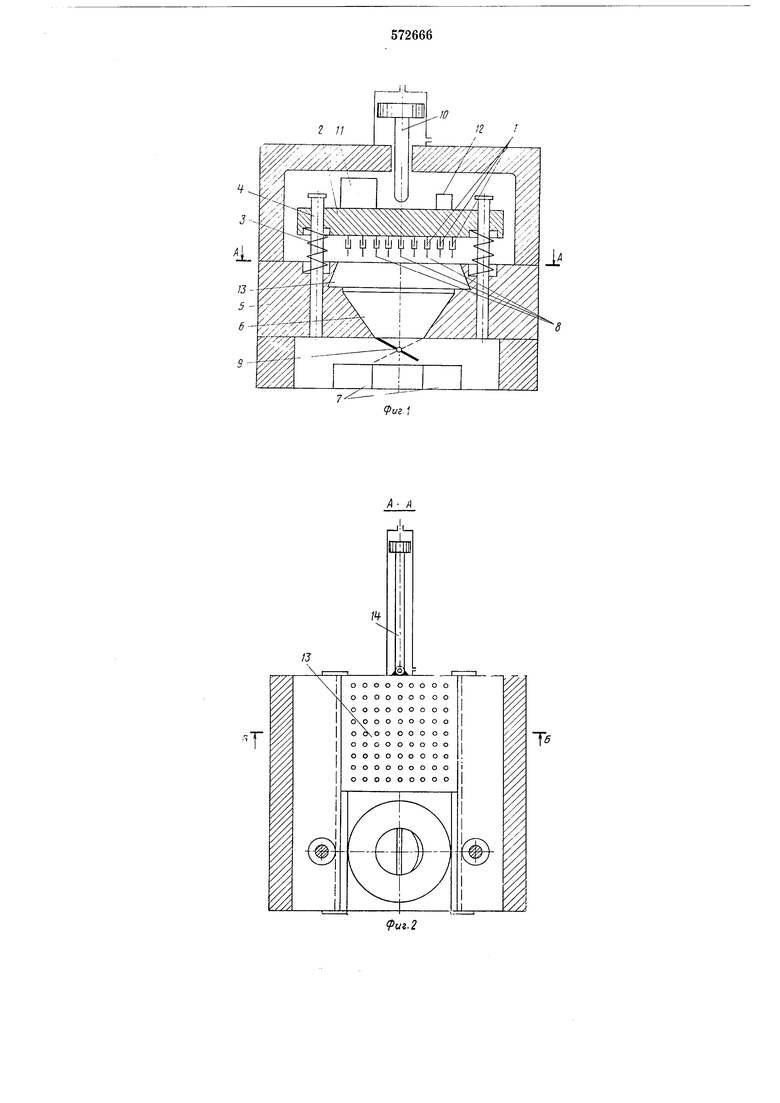
На фиг. 1-3 представлено описываемое устройство с разрезами.
Устройство содержит набор щтырей-калибров 1, установленных на горизонтальной плите 2, которая размещена на пружинах 3 с возможностью перемещения вдоль вертикальной оси по направляющим 4, жестко связанным с корпусом 5. В корпусе 5 выполнена полость (приемный бункер) 6, в части которой расположены лотки 7, в количестве, равном числу групп контролируемых по усилию расчленения элементов 8. Поворотная заслонка 9 служит распределителем для направления каждой группы проконтролированных элементов 8 в соответствующий лоток 7, а привод 10 служит для вертикального перемещения плиты 2.
На плите 2 жестко укреплены вибратор 11, например электромагнитного типа, и датчик
12для измерения амплитуды колебаний плиты 2.
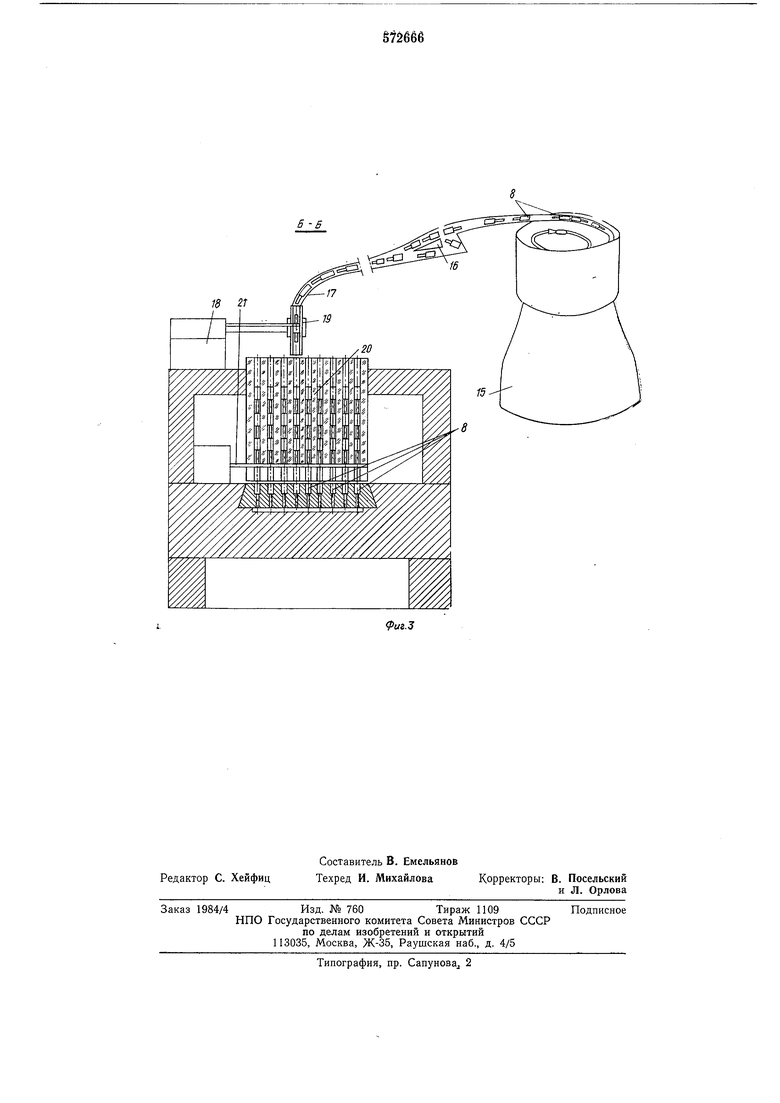
В корпусе 5 выполнены направляющие, по которым движется транспортирующая плита
13(фиг. 2), перемещение которой осуществляется приводом 14. Для установки контролируемых элементов 8 в приемные гнезда транспортирующей плиты 13 служит блок подачи контролируемых элементов (фиг. 3), который состоит из вибробункера 15, ориентатора 16, гибкого полистиролового щланга 17, загрузочного устройства 18 с фиксатором 19, накопителя 20 с отсекателем 21. Циклом работы устройства управляют при помощи программного переключателя.
Устройство работает следующим образом.
Контролируемые элементы 8 засыпают в вибробункер 15, откуда по желобу они направляются в ориентатор 16. Ориентированные контролируемые элементы 8 по полистироловому шлангу 17 поступают к фиксатору 19 загрузочного устройства 18, а затем в накопитель 20. По команде с программного переключателя отсекатель 21 пропускает партию контролируемых элементов 8 по числу приемных отверстий в транспортирующей плите 13. По окончании загрузки контролируемыми элементами гнезд транспортирующей плиты 13 с программного переключателя на привод 14 поступает сигнал, и привод 14 производит подачу транспортирующей плиты 13 под плиту 2, на которой расположены щтыри-калибры 1. Затем по сигналу с программного переключателя включается привод 10, осуществляющий перемещение плиты 2 вниз и сочленение контролируемых элементов 8 со щтырями-калибрами 1.
После окончания сочленения привод 10 возвращают в первоначальное положение, а плита 2 под воздействием пружин 3 также возвращается в исходное положение.
Привод 14 по сигналу с программного переключателя возвращает транспортирующую плиту 13 в исходное положение для очередной загрузки, после чего включают вибратор 11. Плита 2, на которой установлен вибратор И, совершает вынужденные колебания с амплитудой, соответствующей заданному значению усилия расчленения контролируемых элементов со щтырями-калибрами 1 в течение промежутка времени, достаточного для отбора отделившихся от щтырей-калибров контролируемых элементов 8 из приемного бункера 6 в лоток 7. Переводят поворотную заслонку 9 в соответствующее положение и изменяют амплитуду колебаний плиты 2 до значения, соответствующего следующему пределу усиЛИЯ расчленения и т. д. Усилие расчленения определяют по показаниям датчика 12, снабженного щкалой, проградуированной в единицах усилия расчленения. После расчленения всех контролируемых элементов со штырямикалибрами вибратор И выключают. Затем цикл работы устройства повторяют.
Устранение визуального контроля усилия расчленения каждого элемента в отдельности, а также автоматические операции по загрузке, сочленению, расчленению и селективной сборке контролируемых элементов, позволяет производить одновременный контроль и сортировку большого числа контролируемых элементов, что значительно повышает производительность устройства.
Формула изобретения
Устройство для контроля усилия расчленения элементов электрических соединений, содержащее корпус, в котором установлены с возможностью относительного перемещения в горизонтальном и вертикальном направлениях узлы для крепления штырей-калибров и ответных контролируемых элементов электрических соединений, измеритель силы и приводы, отличающееся тем, что, с целью повыщения производительности процесса контроля, узлы для крепления щтырей-калибров и ответных контролируемых элементов выполнены в виде размещенных горизонтально друг над другом плит, причем плита для крепления калибров связана с корпусом упругими элементами и снабжена вибратором и измерителем
амплитуды вибраций, а штыри-калибры размещены со стороны нижней плоскости плиты, против которой в корпусе выполнена полость, сообшающаяся через установленный в корпусе распределитель, например поворотную заслонку с лотком, а в корпусе дополнительно установлены отсекатель с приводом и накопитель, над которым установлен подвижный загружатель с фиксатором, соединенный с дополнительным блоком для подачи контролируемых элементов через подводной канал с ориентатором положения контролируемых элементов.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР ч№ 354294, кл. G OIL 1/04, 1972.
2. Заявка № 1905204/10, кл. G OIL 1/08, 1975.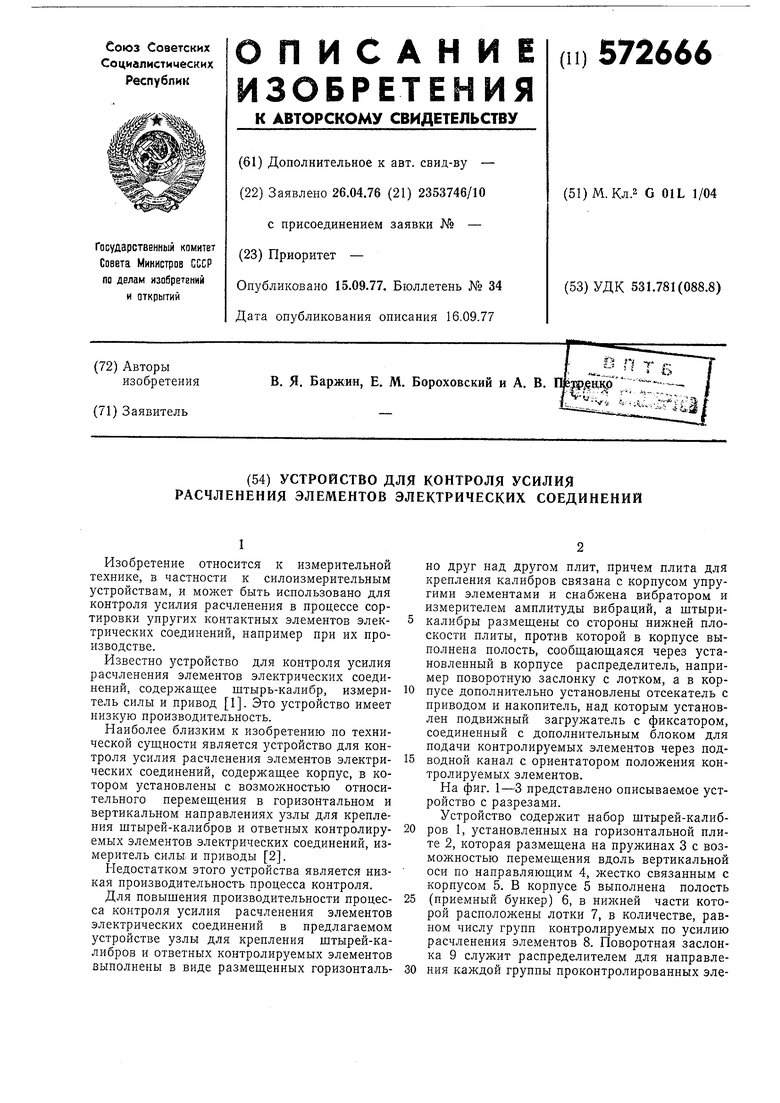

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля усилия расчленения элементов электрических соединений | 1980 |
|
SU932302A2 |
| Устройство для контроля усилия, расчленения штепсельных разъемов | 1976 |
|
SU576517A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1986 |
|
SU1342537A1 |
| Способ заполнения диафрагмы массажной щетки штырями со шляпками | 1985 |
|
SU1308312A1 |
| Устройство для контроля усилия фрикционного сцепления штепсельных разъемов | 1976 |
|
SU623117A1 |
| Устройство для контроля усилия фрикционного сцепления | 1975 |
|
SU539230A1 |
| Устройство для контроля усилия расчленения элементов штепсельных разъемов | 1972 |
|
SU480931A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1982 |
|
SU1037972A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1989 |
|
SU1743654A1 |
| Автомат для сборки сердечников магнитопроводов электрических машин | 1980 |
|
SU959220A1 |