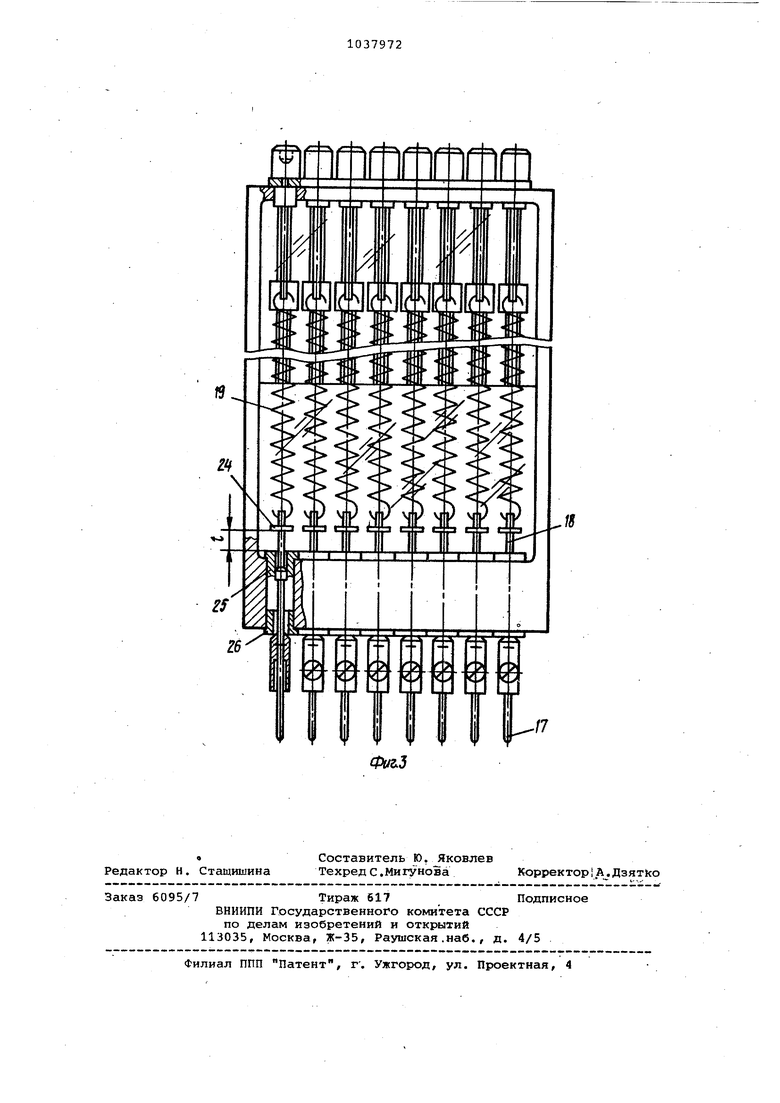
Изобретение относится к машиностроению, в частности к оборудованию для контроля и сортировки гнезд штепсельных разъемов. Известен автомат для контроля и сортировки гнезд штепсельных разъемо содержащий смонтированные на стани-, не загрузочное устройство, поворотный позиционный стол с ячейками для гнезд, приемники для слабых, тугих и годных гнезд, контрольные устройства с датчиками, имекисими измерительный штырь, смонтированный на што ке, тренировочное и доработочное уст ройства, расположенные перед сорти7 ровочным устройством, и систему управления С Недостатком данного устройства является то, что его производительность ограничена. Наиболее близким к предлагаемому является автомат для контроля и сортировки гнезд штепсельные разъемов, содержащий смонтированные на станине загрузочное устройство, транспортное устройство с ячейками для гнезд, при емники для слабых, тугих и годных гнезд, контрольные устройства с датчиками и измерительными штырями, смонтированный на штоках, размещенных на стойках станины, тр енировочное устройство, расположенное перед контрольными и сортировочным устройствами, и систему управления . Недостатком известного устройства является то, что при обеспечении стабильных результатов по качеству контроля его производительность огра ничена. Цель изобретения - повышение производительности . Указанная цель достигается тем, что в автомате для контроля и-сортировки гнезд штепсельных разъемов, содержащем смонтированные на станине загрузочное устройство, транспортное устройство с ячейками для гнезд, при емники для слабых, тугих и годных гнезд, контрольные устройства с датчиками и измерительными штырями, смонтированными на штоках, размещенных на стойках станины, тренировочное устройство, расположеяное перед контрольными и сортировочным уетройствами, и систему управления, он снабжен сорсно смонтированными на общей приводной оси двумя дисками накопителями, размещенным ,под дисками-накопителями групповым ориентато ром , заслонками управления, распо женными между дисками-накопителяма и групповым ориентатором .гнезд, приводными шиберами с отверг стиями, установленными в транспортном устройстве, которое снабжено кассетё1ми-спутниками и средством для перемещения контрольных устройст состоящим из смонтированных на соответствующей стойке станины с возможностью возвратно-поступательного вертикального перемещения подпружиненной колонки с планкой, размещенной на планке центрирующей втулки, приводной подпружиненной тяги, кинематически связанной с системой управления, и кронштейна, на котором смонтирован датчик контрольного устройства. Кроме того, нижний диск-накопитель кинематически связан с системой управления посредством мальтийского креста и зубчатой пары. Кроме того,каждый из датчиков контрольных устройств выполнен однопредельным с количеством измерительных штырей, равным количеству ячеек соответствующей кассеты-спутника транспортного устройства, кроме последнего датчика, при этом измерительные штыри датчика связаны с упругими регулируемыми элементами, настроенными по нижнему пределу усилия расчленения, а штоки последнего датчика связаны с упругими регулируемыми элементами,настроенными по верхнему, пределу усилия расчленения,причем ход штбков равен глуоине ввода измерительного штыря в гнездо. На фиг. 1 изображена кинематическая схема автомата; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - датчик. Автомат для контроля и сортировки гнезд штепсельных разъемов сос.тоит из станины 1, на которой установлено загрузочное устройство с механизмом групповой подачи гнезд и с вибробункером 2, соосно расположенные приемные диск-накопитель 3 и второй диск-накопитель 4, с размещенным под ними групповым ориентатором 5 гнезд, заслонками 6-8 управления, расположенными между дисками-накопителями 3 и 4. На станине 1 также установлено спутниковое транспортное устройство с кассетами-спутниками 9, выполненными с ячейками для размещения контролируемых деталей, имеются пневмоцилйндры 10-13, тренировочное устройство 14, датчики 15 и Ife контроля, снабженные измерительными штьфями 17, размещенными на штоках 18, взаимодействующих с упругими регулируемыми элементами 19 типа пружин. Имеются приемники для слабых, тугих и годных гнезд 20 и система управления с командоаппаратом 21. На каждой позиции датчиков 15 и 16 установлены приводные шибера 22 с отверстиягли,вмонтированные в направ ляющие 23 транспортного спутникового устройства. Отверстия в шиберах 22 расположены соосно измерительным штыг рям 17 датчикое 15 и 16. Датчик 16 установлен последним на станине 1.
Датчики 15 и 16 выполнены однопредельными с числом измерительных штнрей 17, равным числу ячеек в транспортном спутниковом устройстве, при этом штоки 18 датчиков 15 связаны с упругими регулируекими элементами 19, настЕренными по нижнему пределу усилия расчленения а штоки 18 датчика 16 связаны с другими упругими регулируемыми элементами 19, настроенными по верхнему пределу,усилия расчленения.
Штоки 18 датчиков 15 и 16 содержат опорные буртики 24 и центрируются в верхнем положении под действием элементов 19 во втулках 25 и iJ6. Буртик 24 штока 18 имеет зазор Е относительно торца верхней втулки 25. Величина зазора t равна глубине ввода штыря 17 .в контролируемое гнездо.
Автомат содержит также средство для перемещения контрольных устройств выполненное в виде неподвижной стойки 27, на колонках 28 которой с пружинами 29 и 30 установлены с возможностью возвратно-поступательного вертикального -перемещения кронштейны 31, присоединенные,посредством тяг Зг, рычагов 33 и кулачков 34 и 35 к командоаппарату 21 системы управления, которая связана с шиберами 22 поаоедством вспомогательных тяг 36 и рычагов 37.
Командоаппарат 21 системы управления также связан с нижним диском-накопителем 4 посредством конических шес терен 38 и 39, мальтийского креста 40 и зубчатой пары шестерен 41 и 42.
На каждой позиции датчиков 15 и тренировочного устройства 14 расположены планки 43, установленные на подпружиненных колонках 28 и имеющие на свободном конце соосно измерительным штырям 17 центрирующую втулку 44.
Устройство работает следукяцим образом.
Контролируемые гнезда из вибробункера 2 поступают в верхний дискнакопитель 3, затем после набора заданного числа деталей 48 (шт) вйбробункер 2 отключается, срабатывает заслонка 6 управления и все гнезда попадают в нижний диск-накопитель 4, из которого при срабатывании от системы управления 21 следующей заслонки 7 гнезда поступают группами по 8 шт в групповой ориентатор 5 и далее в кассету-спутник 9. За один цикл командоаппарата 21 системы управления диск-накопитель 4 через конические шестерни 38 и 39, мальтцйский крест 40 и зубчатую пару терен 41 и 42 поворачивается на расстояние, равное восьми гнездам.
После, попадания гнезд в кассетуспутник 9 и возврата заслонки 8 управления в исходное положение гориIзонтальный пневмоцилиндр 10 переме- ;
щает все кассе.ты- спутники 9 по- направляющей 23 на один шаг транспортного устройства. При выстое касс етспутников 9 происходит одновременно срабатывание датчиков 15 и 16, тренировочного устройства 14.
При переходе кассет-спутников 9 на позицию одного из датчиков 15 ил 16 гнезда переходят с опорной поверности направляющей 23 на плоскость приводных шиберов 22-И после остановки кассет-спутников 9 от кулачков 34 через рычаги 33, тяги 32 передается движение на кронштейны 31, а вместе с ними и датчикам 15 и 16
В начале движения колонки 28 находятся под действием пружины 29 в верхнем положений, а так как пружина 30 больше по усилию, чем пружина 29, то под действием кронштейна 31 вначале сжимается пружина 29 и плаика 43 перемещается до упора в стойку 27, при этом втулки 44 своими конусами центрируют гнезда.
При дальнейшем опускании кронштенов 31 сжимаются пружины 30 и измерктельные штыри 1/ входят во втулки 44, а затем и в контролируемые гнезд
При выходе измерительных штырей IV одновременно срабатывают шибера 22 через рычаги тяги 36 до совмещения их отверстий с ячейками-отверстиями в кассете-спутнике 9.
Измерительные штыри 17 могут находиться в двух положениях. В первом положении усилие расчленения больше усилия упругого элемента (пружины 19), шток 18 буртиком 24 упирается во втулку :rd5. а таком случае контролируемое гнездо осталось на измерительном штыре 17.
Во вторе положении усилия, расчленения меньше усилия упругого элемента (пружины 19 ), штырь 17 находится в верхнем положении и упирается конусом во втулку 26. В этом случае измерительный штырь 17 свободно выходит из гнезда и так как под гнездом нет опоры,- оно выпадает в приёмник 20.
После некоторой выдержки по времени, достаточной для пролета снявшихся гнезд, шибер 22 возвращается в исходное положение и кронштейн 31 отводится.
При этом измерительные штъфи 17 сначала принудительно выводятся из гнезд, которые упираются во втулки 44, а зат планка 43 возвращается в исходное положение.
Оставшиеся в кассете-спутнике 9 гнезда при повторном цикле будут приведены на следующие позиции. В зависимости от того, на какой позиции выпали гнезда, они попадут в соответствукяцие группы слабые, годные , тугие.
Кассеты-спутники 9 посредством пневмоцилинлров 31-13 возвращаются на позицию загрузки.
Нижний диск-накопитель кинематически связан с командоаппацатом системы управления через мальтийский крест и зубчатую пару, .что обеспечивает групповую загрузку гнезд в кассеты-спутники. Число гнезд в группе может быть выбрано оптимальным, при этом учитывается производительность вибробункера и необходимый цикл при контрольных операциях.
При устойчивой работе вибробункера со скоростью 3 гнезда/с и.цикле работы командооппарата системы управления, равном 3-4 с, необходимое
число отверстий в кассете-спутнике будет 9-12 шт.
В предлагаемом автомате с учетом небэльшого запаса по производительности вибробункера принято по В отверстий-ячеек в кассетах спутниках. Такая конструкция автомата обеспечивает снижение потерь времени, так как основной диск-накопитель работае на число контактов в б раз больше и время для отключения вибробункера и пересыпки гнезд штепсельных разъемов требуется в б раз меньше.
Производительность автомата повышена в 4-5 раз по сравнению с базо,вым объектом.


| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1986 |
|
SU1342537A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1989 |
|
SU1743654A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1976 |
|
SU698684A1 |
| Автомат для контроля и сортировкигНЕзд шТЕпСЕльНыХ РАз'ЕМОВ | 1979 |
|
SU820912A1 |
| Многопозиционный автомат | 1983 |
|
SU1202778A1 |
| Загрузочное устройство | 1981 |
|
SU986719A1 |
| Автоматизированная сборочная линия | 1985 |
|
SU1306691A1 |
| АВТОМАТ ДЛЯ РАЗМЕРНОЙ СОРТИРОВКИ ДЕТАЛЕЙ | 2017 |
|
RU2670732C9 |
| АВТОМАТ ДЛЯ СОРТИРОВКИ ГНЕЗД ШТЕПСЕЛЬНЫХРАЗЪЕМОВ | 1972 |
|
SU327950A1 |
| Устройство для ориентации деталей | 1979 |
|
SU874308A2 |

1. АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ГНЕЗД ШТЕПСЕЛЬНЫХ РАЗЪЕМОВ, содержащий смонтированные на станине загрузочное устройство, транспортное устройство с ячейками для гнезд, приемники для слабых, тугих и годных гнезд, контрольные устройства с датчиками и измерительными штыря ми, смонтированными на штоках, paaV мещенных на стойках станины, трени ровочное устройство, расположенное перед контрольными и сортировочными устройствами,и систему управления, отличающийся тем, что, . с целью повышения производительности, он снабжен соосно смонтированными на общей приводной оси двумя дисками-накопителями, размещенным: под дисками-накопителями групповым ориентатором гнезд, заслонками управления, расположенными между дискгав накопителями и групповым. ориентатором гнезд, приводными шиберами с отверстиями, установленными в транспортном устройстве, jcoTopoe снабже.но кассетами - спутниками и средством для перемещения контрольных устройств, состоящим из смонтированных на соответствующей стойке станины с возможностью возвратно: -поступательного вертикального перемещения подпружиненной колонки с планкой, размещен ной на планке центрирующей втулки, приводной подпружиненной тяги, кинематически связанной с системойyrtpaB1ления, и кронштейна, на котором смонтирован датчик контрольного устрой ства. 2.Автомат по п. 1, отличающийся тем, что нижний дискнакопитель кинематически связан с системой управления посредством мальтийского креста и зубчатой пары. 3.Автомат по п. 1, о т л и ч а ю щ и и с я- тем, что каждый из датчиков контрольных устройств выполнен однопредельным с количество / измерительных штырей, равным количеству ячеек соответствующей кассеты-спутника тран-спортного устройства, кроме последнего датчика, при этом измерительные штыри датчика свяОО заны с упругими регулируемыми эле ментами, настроенными по нижнему СО пределу усилия расчленения, а што ки последнего датчика связаны с М Ю упругими регулируемыми элементами, настроенными по верхнему пределу уси ЛИЯ расчленения, причем ход; штоков равен глубине ввода измерительного штыря в гнездо.
с 15 15 15 16 UUUU II II Л Т J I I 11 1| I II I 1 h II I I i I I I I I И I ll -lliL. . .ТТЛ П ГТ . « 38 У1 35 3f 5« / «/ «, Фиг.1
Y//7//y /////////////
Фиъ.2.
«
.IS
n
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № , кл | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
