(54) КОПИРУЮЩИЙ МАНИПУЛЯТОР
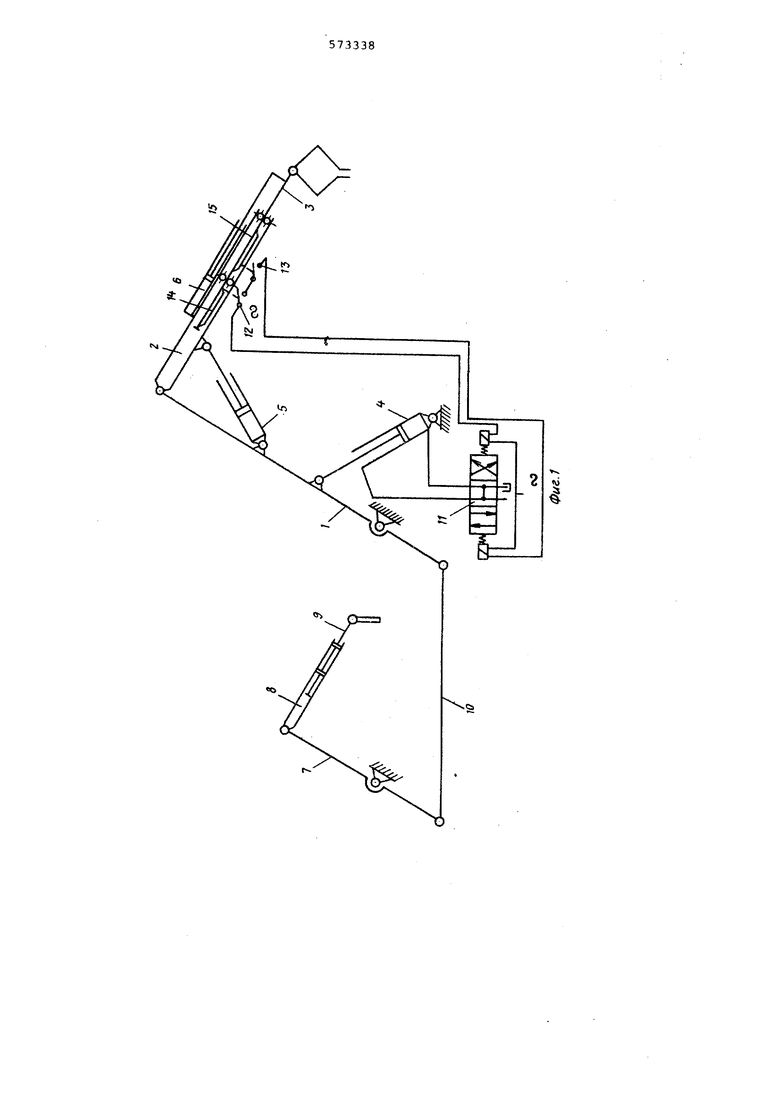
сочлененные плечо 1 и предплечье 2, которое снабжено телескопической рста кой 3. Привод плеча, предплечья и те.лескопической вставки осуществляется соответственно гидроцилинцрами 4,5,6, Управляющий механизм состоит из зве йьеа 7,8,9, аналогичных плечу, предплечью и телескопической встйвке исполнительного механизма. Звено 7 и плечо 1 соединены тягой 10 таким образом, что образуют механизм параЛ лелограмма, т.е. механизм с переда точным отношением, равным единице.
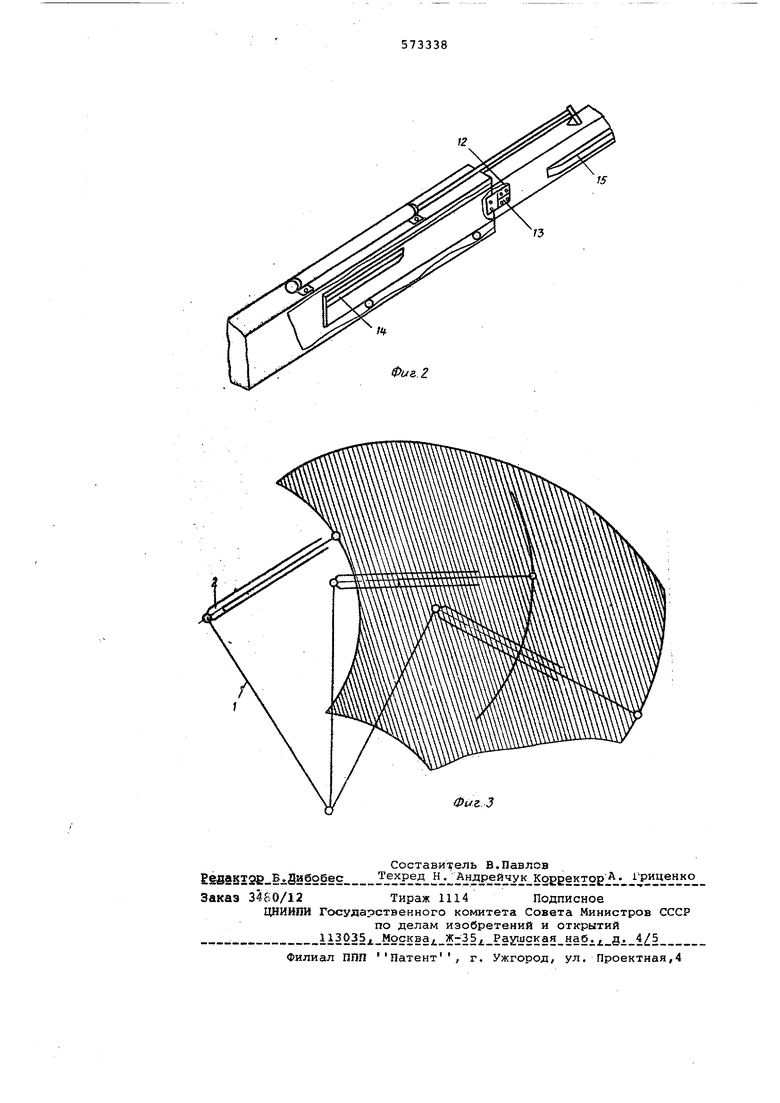
В других вариантах вьтолнения манипулятора возможно применение других передаточных механизмов с передаточнш«и числами, равными единице. Привод плеча манипулятора снабжен электромагнитным трехпозиционным релейным золотником 11, а привод предплечья и телескбпической вставки - гидравлическими следящими системам (на чертежах не. показаны). На предплечье 2 и на одном из аналогичных звеньав заланвдего механизма установлены концевые йыключатели 12 и 13, взаимодействующие с копирами 14 и 15, смонтированными на телескопической вставке 3.
При перемещении оператором рукоятки задающего механизма, если копиры 14 и 15 телескопической вставки 3 не взаимодействуют с концевыми выключателями 12 и 13, исполнительный механизм (плечо 1) манипулятора перемещается с помощью предплечья 2 и телескопической вставки 3, Если же при выполнении рабочей операции копир телескопической вставки 3 войдет в контакт с концевым выключателе, то этот выключатель срабатывает, Вследствие этого смещается релейный золотник 11 в праёое положение при срабатывании концеteoro выключателя 13 или в левое положение при срабатывании выключателя 12, при этом плечо 1 перемещается вправо или влево. Связь плеча 1 со звеном 7
обеспечивает кинематическое подобие управляющего и исполнительного органов.
Формула изобретения
16
Копирующий манипулятор, содержащий исполнительный механизм, состоящий иэ плеча и предплечья переменной длины со следящими гидравлическими привода1, и задающий механизм из аналогичных
звеньев, отличающийся тем что, с целью повышения точности работы и снижения энергозатрат, в цепи привода плеча исполнительного механизма установлен релейный золотник, а на предплечье и одном из аналогичных звеньев задающ.го механизма смонтированы концевые выключатели и связаны с этим золотником.
Источники информации, принятые во
30 внимание при экспертизе
1.Авторское свидетельство № 318537 кл. В 66 С 13/12, 1960.
2,Заявка № 1939064/08,
кл. В 25 Г 3/00, 1973, по которой принято решение о выдаче авторского свидетельства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1341015A1 |
| Гидравлический кран-манипулятор | 1975 |
|
SU865771A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Манипулятор | 1976 |
|
SU566730A1 |
| Манипулятор | 1990 |
|
SU1816262A3 |
| Система управления копирующего манипулятора | 1973 |
|
SU480538A1 |
| МЕХАНИЧЕСКИЙ АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР | 2022 |
|
RU2803482C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| Стенд для динамических испытаний пневматических шин | 1981 |
|
SU993086A1 |