1
Изобретение относится к вспомогательному оборудованию кузпечно-штамповочного производства.
Известна система управления копирующим манипулятором, содержащая рукоятку, связанную одним концом троса через систему блоков со следящим золотником, смонтированным на корпусе манипулятора и гидравлически соединенным с его исполнительным гидроцилиндром.
Однако данная система не обеапечивает необходимой точности управления, так как при работе меняются усилия растяжения и величина удлинения троса.
В предложенной системе указанный недостаток устранен благодаря тому, что она снабжена связанным с другим концом троса устройством постоянного натяжения, а также пружиной, через которую следящий золотник закреплен на корпусе манипулятора.
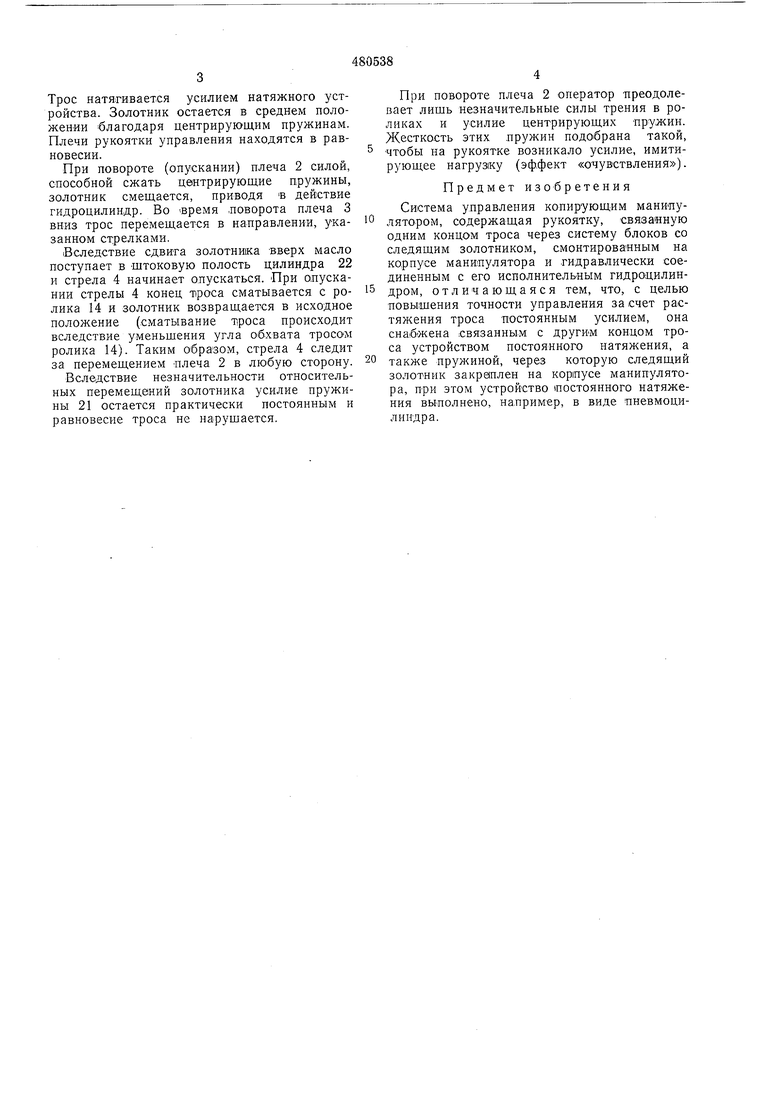
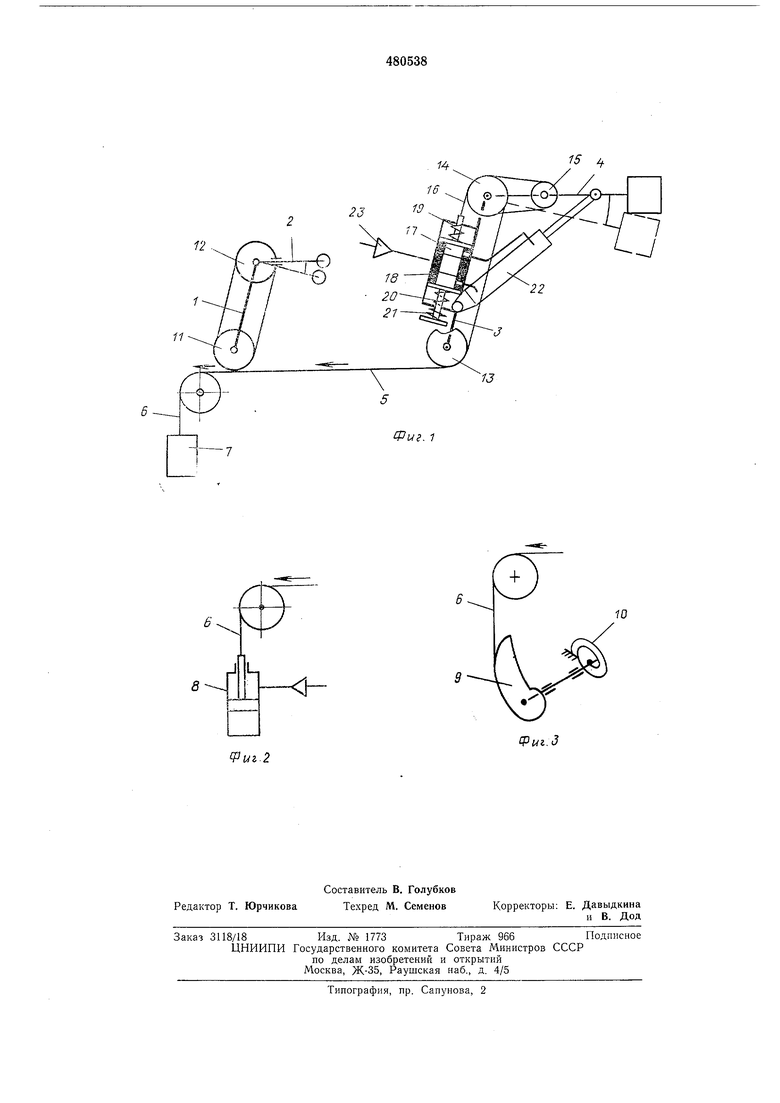
На фиг. 1 схематично показана система управления копирующим манипулятором; на фиг. 2 и 3 изображено натяжное устройство, варианты.
Рукоят1ка управления системой содержит плечи 1 и 2, манипулятор - стрелы 3 и 4.
На фиг. 1 показана система управления только для второй стрелы. Система управления для первой стрелы выполнена аналогично.
Трос 5 кондом 6 соединен с натяжным устройством, которое может быть выполнено J5 виде противовеса 7, пневмодилиндра 8, соединенпого с ресивером постоянного давления (см. фиг. 2), или пружинного механизма с нулевой жесткостью, состоящего из профилированного кулачка 9 и пружины 10 (см. фиг. 3). От натяжного .устройства трос обхватывает свободно насаженный на оси ролик 11, жестко связанный с плечом 2 ролик 12 и, огибая вторично ролик И, направляется к исполнительному механизму манип лятора. С роликом 1-2 трос связан жестко.
Далее трос огибает свободносидящие ролики 13, 14 и 15 и концом 16 соединяется со следящим золотником 17. Корпус 18 золотпика соединен со стрелой Э. На торцы золотпика действуют предварительно сжатые центрирующие пружины 19 и 20, а хвостовая часть золотника опирается на пружину 21. Kopinyc золотника соединен гидравлически с гидродилиндром 22 и с источником давления 23.
Описанная система работает следующи.м образом.
Усилие сжатия пружины 21 устанавливается равным усилию натяжного устройства.
Трос натягивается усилием натяжного устройства. Золотник остается в среднем положении благодаря центрирующим пружинам. Плечи рукоятки управления находятся в равновесии.
При повороте (опускании) нлеча 2 силой, способной сжать центрирующие цружины, золотник смещается, приводя в действие гидроцилиндр. Во .время ловорота плеча 3 вниз трос перемещается в направлении, указанном стрелками.
Вследствие сдвига золотника -вверх масло поступает в штоковую полость цилиндра 22 и стрела 4 начинает олускаться. При олускании стрелы 4 конец троса сматывается с ролика 14 и золотник возвращается в исходное положение (сматывание проса происходит вследствие уменьшения угла обхвата тросом ролика 14). Таким образом, стрела 4 следит за перемещением -плеча 2 в любую сторону.
Вследствие незначительности относительных перемеще1ний золотника усилие пружины 21 остается практически постоянным и равновесие троса не нарушается.
При повороте плеча 2 оператор преодолевает лишь незначительные силы трения в роликах и усилие центрирующих -пружин. Жесткость этих лружин подобрана такой, Чтобы на рукоятке возникало усилие, имитирующее нагрузку (эффект «о-чувствления).
Предмет изобретения
Система управления копирующим манипулятором, содержащая рукоятку, связанную одним концом троса через систему блоков со следящим золотником, смонтированным на корпусе манипулятора и гидравлически соединенным с его исполнительным гидроцилиндром, отличающаяся тем, что, с целью повышения точности управления за счет растяжения троса постоянным усилием, она снабжена связанным с другим концом троса устройством постоянного натяжения, а также пружиной, через которую следящий золотник закреплен на корпусе манипулятора, п-ри этом устройство постоянного натяжения выполнено, на.пример, в виде пневмоцилиндра. 15 Фиг. 1 4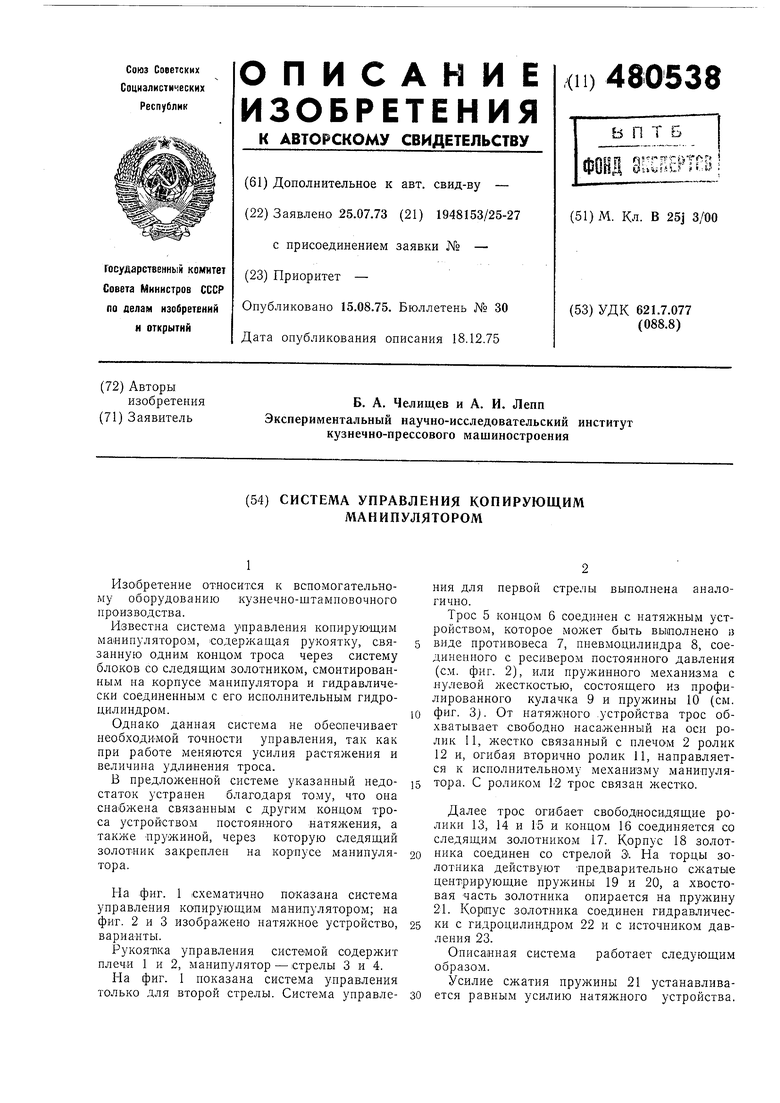
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1986 |
|
SU1380932A1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Гидравлический привод механизма копания | 1973 |
|
SU653356A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Стреловидный исполнительный орган проходческого комбайна | 1973 |
|
SU471446A1 |
| Устройство управления машиной манипуляторного типа | 1978 |
|
SU701792A1 |
| Гидравлический кран-манипулятор | 1975 |
|
SU865771A1 |
| Следящая система автоматического управления | 1956 |
|
SU118342A1 |
| Рабочее оборудование одноковшового экскаватора | 1979 |
|
SU777164A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНТАКТНОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННЫХ ЖЕЛЕЗНЫХ ДОРОГ | 2001 |
|
RU2223184C2 |
Фиг,ч
