Изобретение относится к машиностроению, а именно к копирующим манипуляторам для механизации ручных вспомогательных работ, погрузочно- разгрузочных операций, штабелирования грузов, монтажных работ.
Цель изобретения - расширение функциональных возможностей за счет увеличения рабочей зоны,
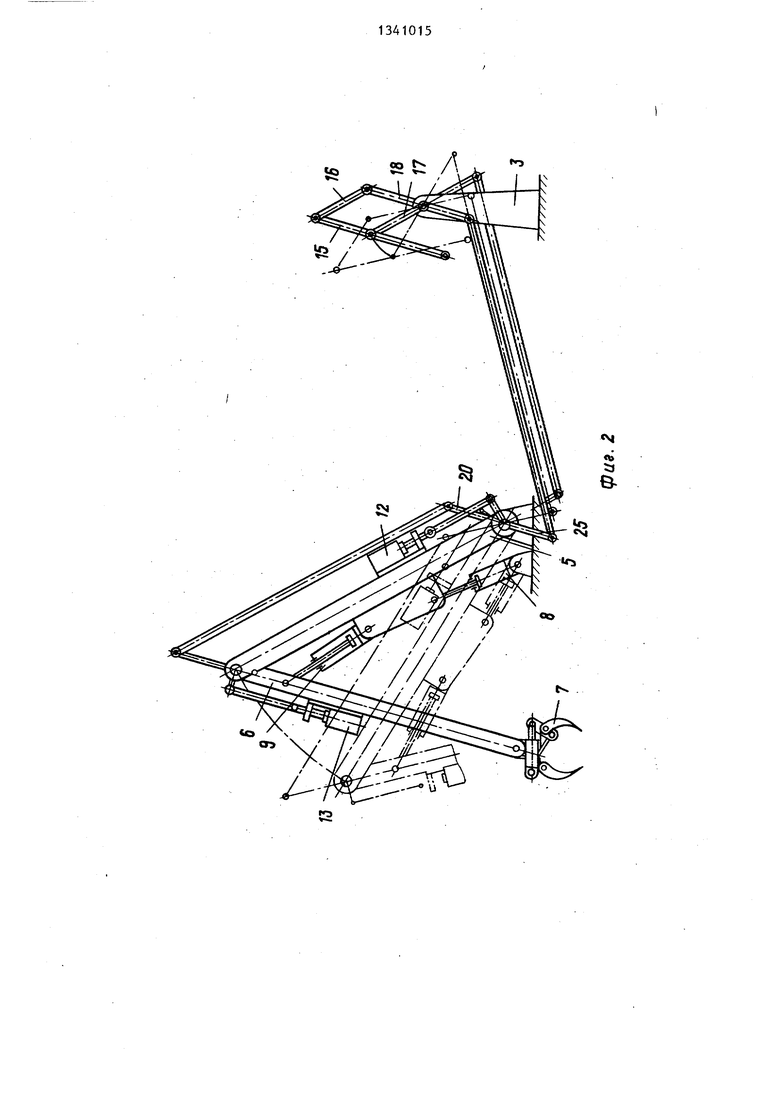
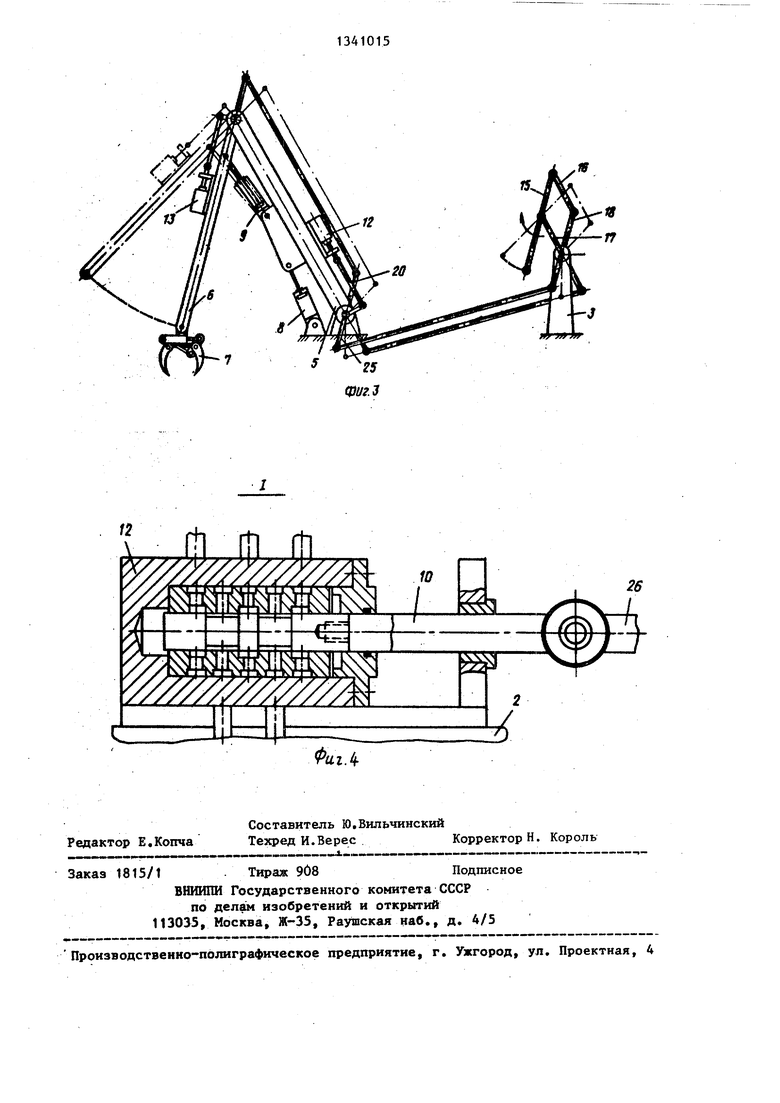
На фиго1 показан манипулятор, общий вид; на фиг«2 - то же и другое положение гшеча стрелы/ на фигоЗ - то же и другое положение предплечья стрелы; на - узел I на фиг,1, разрез.
Манипулятор состоит из смонтированных на основании 1 стрелы 2, узла 3 управления и гидравлического следящего привода 4 Стрела состоит из шарни)но соединенных плеча 5, предплечья 6 и захватного органа 7, Основание 1 и плечо 5 снабжены шар- нирно связанными с ними силовыми цилиндрами 8 и 9, штоки которых также шарнирно связаны соответственно с плечом и предплечьем, а рабочие полости указанных цилиндров магистрали связаны соответственно с золотниками 10 и 11 гидрораспределителей 12 и 13, которые, в свою очередь, магистралями связаны с насосами 14, Узел управления состоит из шарнирно- рычажного параллелограмма со звеньями 15-18, в котором звено 15 является ведущим, при этом звено 17 через тягу 19, двуплечие рычаги 20 и 21 и тяги 22 и 23 шарнирно связано с золотником 11, а звено 18 через тягу 24, двуплечий рычаг 25 и тягу 26 шарнирно связано .с золотником 10
Манипулятор работает следующим образом.
Для поворота плеча 5 оператор за ведущее звено 15 узла 3 управления перемещает параллелограмм 15-18 в положение, показанное на фиг,2 пунктиром При этом перемещается золотник 10 относительно корпуса гидрораспределителя 12 и рабочая жидкость от насоса 14 начинает поступать в соответствующую полость силового цилиндра 8, При этом вторая полость соединяется со сливом и начинается перемещение штока этого хщлиндра и
поворот плеча относительно основания 1 до тех пор, пока золотник 10 и корпус гидрораспределителя не замкнут исходного положения. При этом подача жидкости в силовой цилиндр 8 прекращается и плечо 5 останавливается о В данном случае угол между плечом 5 и предплечьем 6 не меняетQ ся, и они принимают положение, показанное на ,
Для поворота предплечья 6 отйЪси- тельно плеча поворотом звена 15 параллелограмм 15-18 переводится в по5 ложение, показанное на фиг,3 пунктиром При этом аналогично срабатьша- ют гидрораспределитель 13 и силовой цилиндр 9, и предплечье 6 поворачивается относительно- плеча 5, кото
0 рое, в свою очередь, остается неподвижным относительно основания 1,
Для одновременного перемещения плеча 5 и предплечья 6 необходимо осуществить комбинированное из опи5 санных перемещение управляющего звена 15,
Формула изобретения
Q Манипулятор, содержащий основание, шарнирно смонтированную на нем стрелу, состоящую из последовательно расположенных и шарнирно соединенных между собой звеньев и захватного органа, рычажно-шарнирньш узел управления стрелой,, содержащий ведущее и ведомое звенья, размещенные на основании, и тяги, кинематически связьшающие узел управления с управляющими золотниками гидравлического следящего привода, отличающийся тем, что, с целью расширения функциональных возможностей за счет увеличения рабочей зоны, узел управления выполнен в виде шарнирно- рычажного параллелограмма, два смежных ведомых звена которого общим шарниром связаны с основанием и вьшолне- ны в виде двуплечих рычагов, одними концами с помощью з помянутых тяг ки0 нематически связанных с управляющими золотниками гидравлического следящего привода, причем эти тяги вьшолнены жесткими и соединены с указанными рычагами также шарнирно.
5
0
5
S2 t /
M
«to
eZ5
ф1/г.З
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Манипулятор | 1986 |
|
SU1324843A1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Манипулятор | 1975 |
|
SU547195A1 |
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| Транспортное средство для работы на склонах | 1982 |
|
SU1133126A1 |
| Гидрокопировальный многопроходный суппорт | 1977 |
|
SU680857A1 |
| Устройство рычажного управления механизмом | 1981 |
|
SU955001A1 |
Изобретение относится к машиностроению, а именно к копирующим манипуляторам для механизации ручных вспомогательных работ погрузочно-раз- грузочных операций, штабелирования 21 23 грузов и монтажных работ. Цель изобретения - расширение функциональных возможностей за счет увеличения рабочей зоныо При перемещении ведущего звена 15 шарнирно-рьгчажного параллелограмма через тяги и рычаги перемещаются золотники 10 и 11 гидрораспре- делйтелей 12 и 13 следящей системы управленияо При этом рабочая жидкость от насосов 14 поступает в соответст- , вукщие полости силовьк цилиндров 8 и 9, перемещение штоков которых осуществляют повороты плеча 5 относительно основания 1 и предплечья 6 относительно плеча 5о При этом траектории перемещения захватного органа 7 подобна траектории перемещения свободного конца звена 15, 4 Ш1« Ш |СЛ К 1СЛ 19
Фиг Л
Составитель Ю.Вильчинский
Техред И.ВересКорректор Н. Король
Редактор Е.Копча
Заказ 1815/1 Тираж 908Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| МАНИПУЛЯТОР ДЛЯ МОНТАЖНЫХ И ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТB^lBJU'^l.-' | 0 |
|
SU377229A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| . | |||
