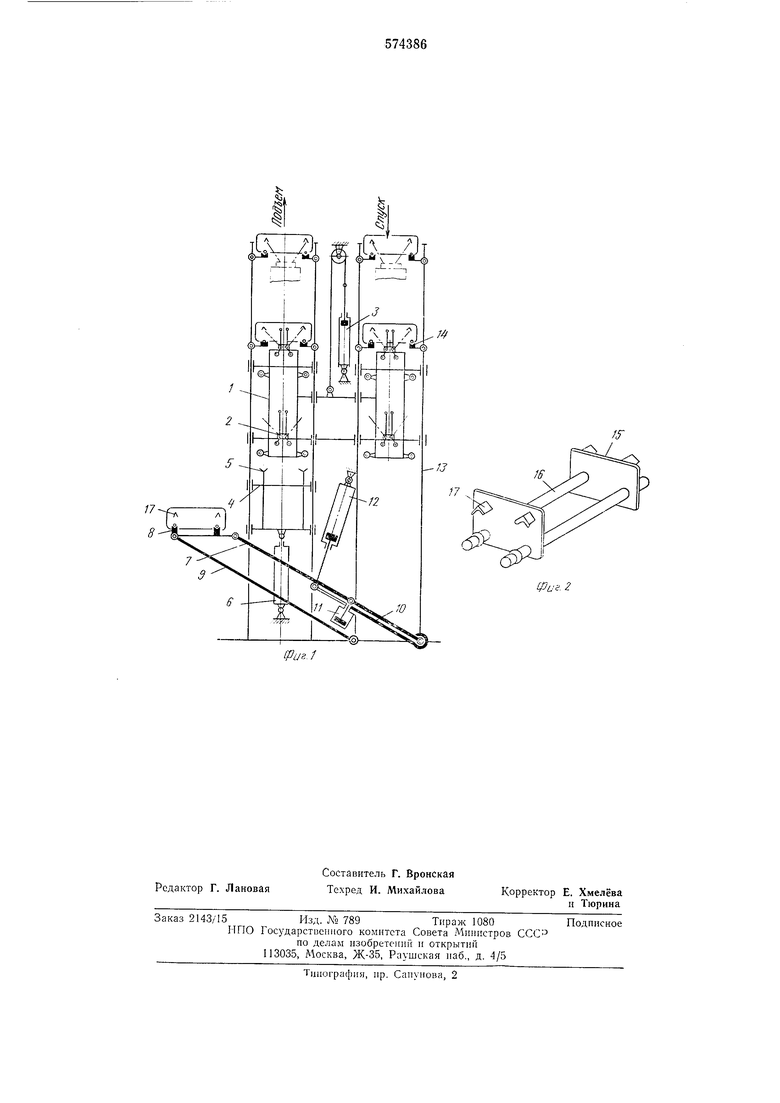
мы 8 механизма 7 навешивания совмещаются с осями грузоприемных ложементов грузовой платформы 1.
Груз с рамой-спутником 15, установленный механизмом 7 навешивания в положение нодачи (при крайнем нижнем положеиии механизма 4 подачи), подается посредством перевода механизма 4 подачи в крайнее верхнее положение в зоиу захвата грузозахватными поворотными упорами 2 грузовой платформы 1, находящейся в крайнем нижнем положении. При перемещении грузовой платформы 1 из крайнего нижнего положения в верхнее положение гидроцнлипдром 3 грузозахватные поворотные упоры 2, управляемые копирами на линии подъема захватывают груз с рамой-спутником 15 за упоры 17 для захвата. Нижняя пара грузозахватных упоров 2 снимает груз с механизма навешивания 7, верхняя пара грузозахватных упоров 2 перемещает груз с нижнего ряда поворотных ложементов 14 на верхний ряд новоротных ло кементов 14, осуществляя, таким образом, перемещение вверх на один шаг.
Освободившийся от груза механизм 7 навешивания занимает положение съема груза гидроцилиндром И.
При перемещении из крайнего положения грузовой платформы 1 в верхнее крайнее положение грузозахватные поворотные упоры 2, управляемые копирами па линии спуска, захватывают груз с рамой-спутником 15. Верхняя пара грузозахватных упоров 2 принимает груз с верхнего ряда ложементов 14, нижняя иара грузозахватных упоров 2 принимает груз с нижнего ряда ложементов 14.
При перемепгении грузовой платформы 1 из крайнего нижнего иоложения в крайнее верхнее грузоприемные ложементы 14 на линии подъема занимают вертикальное положение, не препятствуя перемещению грузовой платформы 1 с грузом, и возвращаются в исходное горизонтальное положение по достижении грузовой платформы 1 крайнего верхнего положения. На линии спуска грузоприемные ложементы 14 занимают вертикальное положение после приема груза грузозахватными поворотными упорами 2 и остаются в таком иоложении до достижения грузовой платформой 1 крайнего верхнего положения.
При перемещении грузовой платформы 1 в исходное (крайнее нижнее) положение па
липии подъема груз с рамой-спутником 15, находивщийся на верхней паре грузозахватпых упоров 2, остается на верхнем ряду поворотных ложементов 14, а груз, находившийся
па нижней паре грузозахватных уноров 2, остается на нижнем ряду поворотных ложементов 14. Груз, находившийся на верхней паре грузозахватных упоров 2, переносится па нижний ряд лолсементов 14, к этому времени занявших горизонтальное положение, а с нижней пары грузозахватных упоров 2 - на механизм 7 навешивания, к этому времени занявший положение съема. Механизм 7 навешивания, приняв грзз, занимает исходное
положение приема при одновременной работе гидроцнлиндров 11 и 12.
Последующая операция совершается в той же последовательности.
Шаговый подъемник позволяет механизировать процессы навешивания и иодъема груза с точной фиксацией последнего в поднятом положении но вертикали и горизонтали, обеепечивая автоматический захват гальвапическим автооператором для межоперациониогп
неремепгения.
Формула и 3 о б р е т е п и я
Шаговый подъемник, содержащий перемещающуюся в направляющих грззовую платформу с гидроцилиндром подъема и поворотные зпоры, отлнчающийея тем, что, с целью повышения производительности, подъемник снабжен механизмом подачи, содержащим смонтированную на направляющих подъемную платформу с дополнительным гидроприводом, и механизмом навешивания, содержащим грузоприемную платформу, а на нанравляющих шарнирно смонтированы приводные качаюпгиеея рычаги, взаимодействующие при подъеме с грузовой платформой через механизм подачи, а при спуске - непосредствепно с грззовой платформой, при этом грузоприемпая платформа установлена на
указанных рычагах.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 464525, кл. В 66F 9/06, 1973.
2.Авторское свидетельство СССР 444726, кл. В 66F 1/08, 1971. lC 2i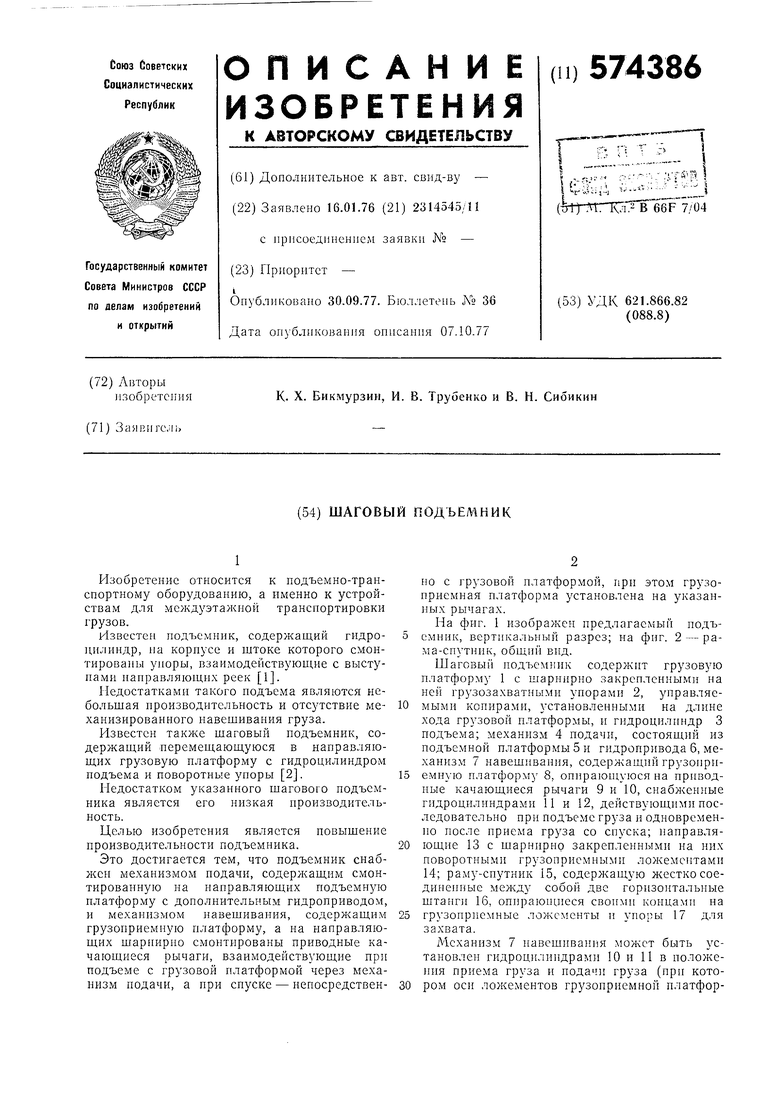
| название | год | авторы | номер документа |
|---|---|---|---|
| Передаточное устройство шагового подъемника для перемещения грузов | 1978 |
|
SU745799A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| ТРАНСПОРТНАЯ СИСТЕМА СКЛАДА ВЫСОКОПЛОТНОГО ЯРУСНОГО ХРАНЕНИЯ ГРУЗА НА ПОДДОНАХ | 2006 |
|
RU2323149C1 |
| ПОДЪЕМНИК ГИДРАВЛИЧЕСКИЙ | 2011 |
|
RU2458849C1 |
| Строительный подъемник | 1978 |
|
SU740677A1 |
| УНИВЕРСАЛЬНЫЙ БОРТОВОЙ ПОДЪЕМНИК ДЛЯ ПАССАЖИРОВ С ОГРАНИЧЕННЫМИ ВОЗМОЖНОСТЯМИ | 2019 |
|
RU2726211C1 |
| Строительный подъемник | 1977 |
|
SU701912A1 |
| ТРАНСПОРТАБЕЛЬНЫЙ БОРТОВОЙ ПОДЪЁМНИК | 2015 |
|
RU2602269C2 |
| АЭРОМОБИЛЬНЫЙ ПЕРЕГРУЗОЧНЫЙ КОМПЛЕКС | 1992 |
|
RU2047552C1 |