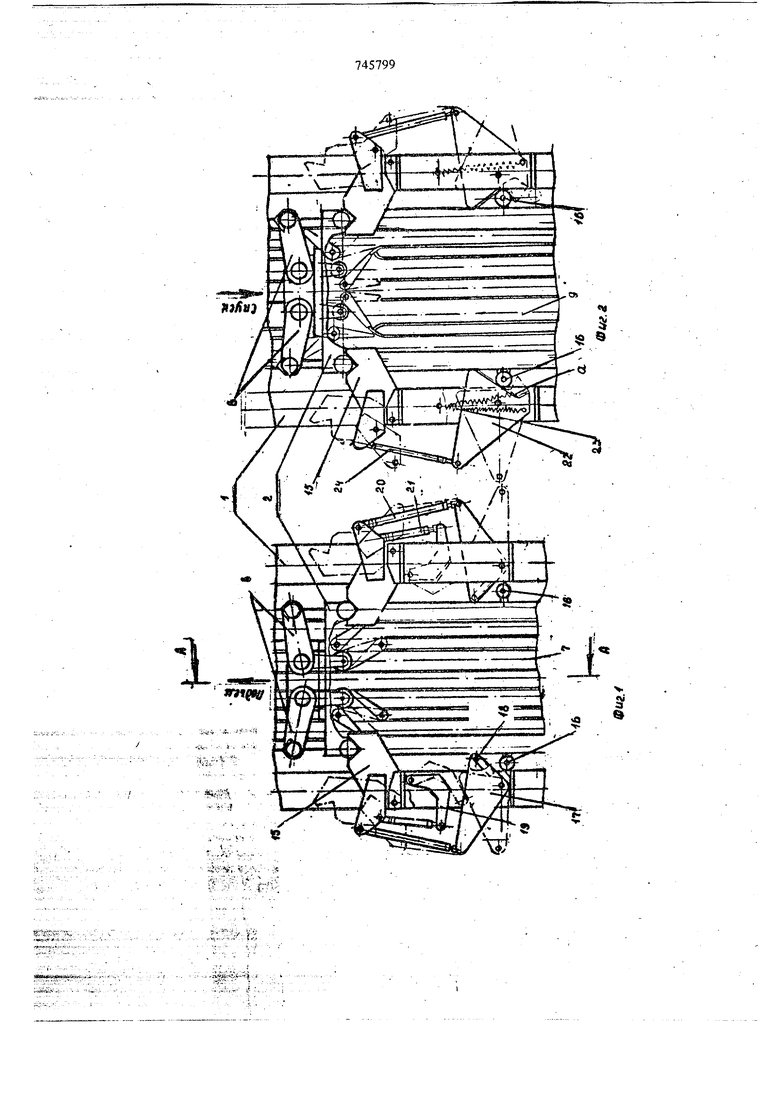
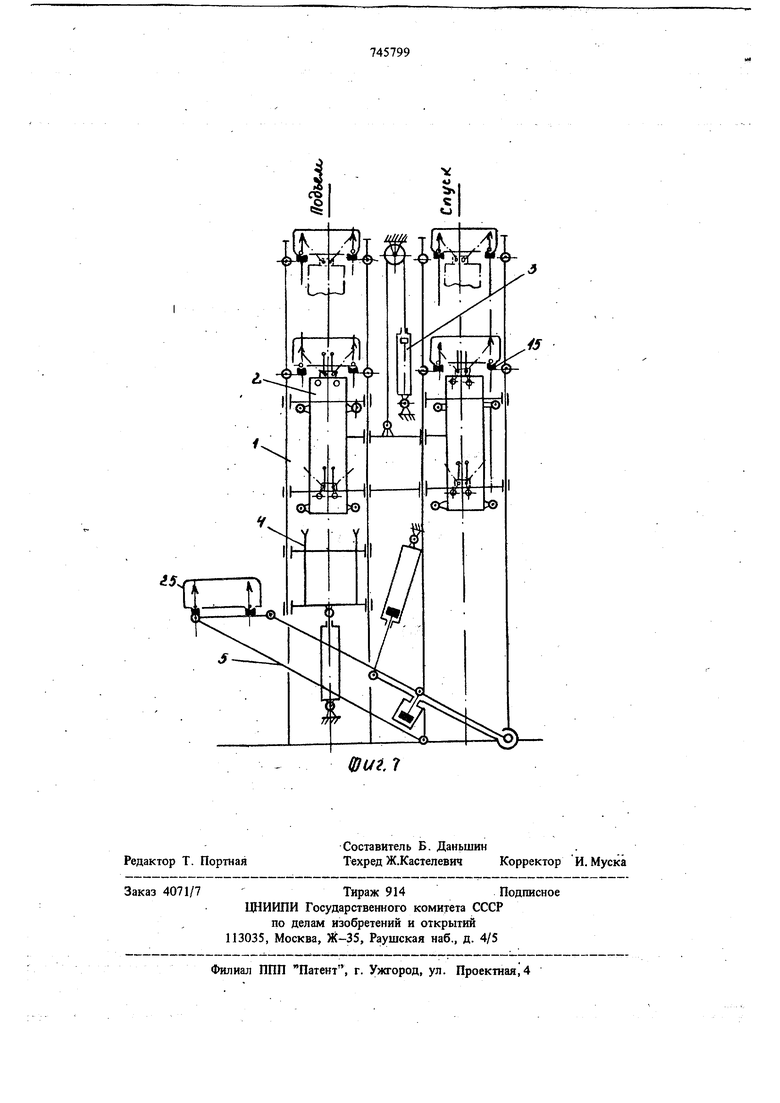
(54) ПЕРЕДАТОЧНОЕ УСТРОЙСТВО ШАГОВОГО ПОДЪЕМНИКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ Изобретение относится к непрерывному тран порту и касается конструирования передаточных устройств шагового подъемника для перемещения грузов. Известно передаточное устройство шагового подъемника для перемещения грузов, содержащее грузовую подъемную платформу с нажимными роликами, перемещающуюся в непод вижных направляющих по линиях подъема и спуска, с установленными на ней поворотными грузозахватными упорами, управляемыми копи рами, установленными по длине хо)о(а грузовой йодъемной платформы и оснащенньпии подпружиненными стрелочными переводами, механизмы подъема подачи и навешивания рамы-спут.ника с грузом 1. Недостаток указанного устройства заклюздется в низкой точности фиксации положения рамы-спутника с грузом по вертакали и горизонтали при перемещении их грузовой -подъемной платформой. Цель изобретения - более точная: фиксащш положения рамы-спутника с грузом по вертикали и горизонтали при перемещении их гру-1 зовой подъемной платформой. Для этого оно снабжено грузоприемньпии ложементами, смонтированными на неподвижных направляющих с возможностью их поворота посредством наидамных роликов упомянутой платформы и системой поворотных рычагов с тягами, при этом поворотные рычаги установлены на неподвижных направляющих со смещением друг относительно друга по вертикали, а наружные концы рычагов связаны тягами. Кроме того, грузоприемный ложемент на линии подъема снабжен поворотными рычагами, один из которых вьщолнен треугольной формы с подпружиненной рабочей поверхностью в виде флажка, а другой рычаг вьшолнен в виде скобы. Поворотный рьпиг грузоприемного ложемента на линии спуска вьшолнен с уступом на ipro рабочей поверхности. На фиг. 1 схематически изображено описы- . ваемре устройство на линии подъема; на фиг. 2 - то же, на линии спуска; на фиг. 3 -расположение копиров на лт1ии подъема; на фиг; 4 - то же, на линии спуска; на фиг. 5 разрез А-А на фиг. 1; на фиг. 6 - рама-спутник; на фиг. 7 - вертикальный разрез шаго §бг|6ГТГ6д геИНйка с передаточным устройством. ПередаЮчНое устройство Содержит неподвижные направляющие 1, грузовую платформу 2, гидрощшиндр 3 подъема платформы, механизм 4 подачи и механизм 5 навепшвания. На груз вой платформе закреплены поворотные грузозЗхвашые упоры 6, управляемые копирами 7 тгйНйи по.дъема, оснащенными стрелочными переводами 8, копирами линии спуска 9, осна тцённымй подпружиненными стрелочными пере водами 10, И и 12. На одной оси с упорами .расположен рычаг 13, на котором закреплены ролики 14, контактирующие с копи рами 7 и 9.. На неподвижных направ;1яющих 1 шарнирно закреплены грузоприемные ложементы 15, управляемые Нажимными роликами 16, смонтированными на грузовой платформе 2и воздействующими на поворотный рычаг 17 треугольной формы системы поворотных рычагов, оснащенной подпружиненным флаяосОм 18 для беспрепятстве1шого перемещения ропика 14 При движении грузовой платформы из верхнего крайнего положения в нижнее. Рычаг 19 с1Ьтемы noBopOTFfbuc рычагов выполнен в виде скобы, тяги 20, 21 на линии подъема соединяют соответственно ложементы 15 с рычагами 19 и рычагами 17. Рычаг 22 системы вьшолнен с уступом а, подпружинен пружиной 23 и соединен о ложементом 15 посредством тяги 24 на лини Рама-спутник 25 содержит жестко соединен ные между собой две горизонтальные штанги 26, опирающие:ся своими конвдми на грузоприемные ложементы 15 и упоры 27 для захвата рамы-спутника 25. Передаточное устройство шагбвого подъемника pa6ofaeT следующим образом. На линии подъема груз с рамой-спутником 25, установленный механизмом 5 навешивания в положение подата (при крайнем нижнем положении механюма 4 подачи), подается посредством перевода механизма 4 поДачи в, крайнее верхнее п6лож«я1И(г в зййу захвата тфузозахватными пово1ротными упорами 6 гру зовой платформы 2, находящейся в крайнем нижнем положении. При перемещении грузовой платформы 2 из крайнего нижнего положения в крайнее верхнее попожение гидроцилиндром 3 грузозахватные поворотные упоры 6, уЛраВляемь11е 1СО1Вфами йа линии подъе ма, захватывают груз с рамой-спутником 25 за упоры 27 для захвата. 7 4 Нижняя пара грузозахватных упоров 6 снимает раму-спулжк 25 с грузом с механизма навешивания 5, верхняя пара грузозахватных упоров 6 захватывает раму-спутник с грузом с нижнего ряда грузоприемных ложементов 15 и грузовая платформа с грузами достигает крайнего верхнего положения. Из крайнего верхнего по.пожения платформа начинает движение в крайнее нижнее, при этом рама-спутник с грузом, находящаяся на верхнем ряду грузозахватных упоров 6, устанавливается на верхний ряд грузоприемных ложементов 15 концами горизонтальных щтанг 26, а находящаяся на нижнем ряду грузозахватных упоров 6 рама-спутник с грузом устанавливается на нижний ряд грузоприемных ложементов 15, таким образом осуществляя перемещение на один шаг за один двойной ход грузовой платформы. При перемещении грузовой платформы 2 из нижнего крайнего положения в крайнее верхнее рама-спутник 25 с грузом, установленная на грузоприемных ложементах 15 опорными концами горизонтальных щтанг 26, захватывается грузозахватными упорами 6 за упоры 27 для захвата. Перевод грузозахватных упоров 6 в положение для захвата осуществляется рычагами 13 при переходе роликов 14 с В1гешних дорожек копиров 7 на внутренние при помощи стрелочных переводов 8; нажимные ролики 16, набегая на поворотные рычаги 17, устанавливают грузоприемные ложементы 15 в вертикально положение с помощью тяги 20, пропуская раму-спутник 25 с закрепленным на ней грузом. В этом положении грузоприемные ложементы 15 через тягу 21 приводят в рабочее положение поворотный рычаг 17; нажимной ролик 16 при дальнейшем движении грузовой платформы в крайнее верхнее положение, воздействуя на поворотный рычаг 17 через тягу 21, возвращает грузоприемный ложемент 15 в исходное (горизонтальное) положение до достижения грузоподъемной платформой крайнего верхнего положения. По достижении крайнего верхнего положения грузовая платформа начинает двигаться вниз, при этом рама-спутник 25, установленная на верхней паре поворотных грузозахватных упоров 6, опорными концами горизонтальных штанг 26 устанавливается на грузоприемные ложементы 15, установленные горизонтально. . При дальнейшем перемещении грузозахватные упоры 6 выходят из зацепления с захватными упорами 27 поворотом рычагов 13 при переходе роликов 14 с внутренних дорожек на внешние при помощи стрелочных переводов 8. 57 На линии спуска при движении грузоподъем ной платформы из крайнего нижнего положения в крайнее верхнее рама-спутник 25 с грузом, установленная на грузоприемных ложе ментах 15 опорными концами горизонтальных штанг 26, захватывается грузозахватными упо рами 6 за упоры 27 для захвата рамы-спутника. Перевод грузозахватных упоров в положение для захвата осуществляется рычагами 13 при переходе роликов 14 с внешней дорожки копиров 9 на внутренние при помощи стрелочных переводов 11 и 12; нажимные ролики 16, набегая на поворотные рьмаги 17 устанавливают грузоприемные ложементы 15 после захвата упорами 6 рамы-спутника 25 за упоры 27 в вертикалыюе положение, кото рое они сохраняют с помошью пружины 23 д достижения грузовой платформой вместе с грузами крайнего верхнего полбженкл. По достижении крайнего верхнего положения грузовая платформа вместе с грузами начинает двигаться вниз.. Рама-спутник 25 с грузом, установленная на поворотных грузозахватных упорах 6, упорами 27 для захвата опускается, так как грузоприемные ложементы 15 находятся в вертикальном положении, удерживаемые поворотными рычагами 22 с помощью пружины 23; упоры 6 под действием веса рамы-спутинка с закрепленным на ней грузом остаются в положении приема груза и, так как вес груза значительно больше усилия пружины стрелочного перевода 10, ролик 14 перемещается по внутренним дорожкам копира, преодолевая усилие пружины, после чего нажимной ролик 16, набегая на выступ поворотного рычага 22, возвращает грузоприемные ложементы 15 в горизонтальное положение. Приня тая на верхний ряд грузозахватных упоров 6 рама-спутник с закрепленным на ней грузо устанавливается на нижний ряд грузоприемных ложементов 15, а принятые на нижний ряд грузозахватных упоров 6 рама-спутник с грузом устанавливаются на нижний ряд грузоприемных ложементов 15, осуществляя таким образом перемещение рамы-спутника с грузом на один щаг вниз.. Грузозахватные упоры 6 выходят из зацепления с упорами для захвата .27 поворотом рычагов 13 при переходе роликов 14 с внутренних дорожек копира 9 на внеишие с помощью стрелочных переводов II и 12; V-образный стрелочный перевод II служит для вывода контактньа роликов 14 с внешних дорожек копиров 9 на внутренние следующей пары грузозахватных упоров 6 при числе их два и более. Таким образом, за один двойной ход грузовой платформы совершается одновременное перемещение груза на один шаг вверх - на линии подъема и на один шаг вниз - на линии спуска. Последуюшая операция совершается в той же последовательности. Формула изобретения 1.Передаточное устройство шагового подъемника для перемещения грузов, содержащее грузовую подъемную платформу с нажимньгми роликами, перемещающуюся в неподвижных направляющих по линиям подъема и спуска, с установленными на ней поворотными грузозахватными упорами, управляемыми копирами, установленными по длине хода грузовой подъемной платформы и оснащенными подпружиненными стрелочными переводами, механизмы подъема подачи и навешивания рамы-спутника с грузом, отличающееся тем, что, с целью более точной фиксации положения рамы-спутника с грузом по вертикали и горизонтали при перемещении их грузовой подъемной платх ормой, оно снабжено грузоприемными ложементаг ми, смонтированными на неподвижных, направляющих с возможностью их поборота посредством нажимных роликов упомянутой платформы и системой поворотных рычагов с тягами, при зтом поворотные рьмаги установлены на неподвижных направляющих со смещением друг относительно друга по вертикали, а наружные концы рьиагов связаны тягами. 2.Устройство по п. 1, о-т л и ч а ю щ е ес я тем, что грузоприемный ло5кемент на линии подъема снабжен поворотными рычагами, один из. которых выполнен т ольной формы с подпружиненной ра чеи псверх гостыр в виде флажка, а другой рычаг выголнен в виде скобы. 3.Устройст)& , отличающееся тем, что поворо-ный рычаг грузоприемного ложемента на j l f CTyMa выполнен с уступом на его пой1ф5с11дсти. ИсточЯЯКТГ информации, - ti№-i-u iiar принятые всГвниШИиГпри экспертизе 1. Авторское свидетйЯКтво СССР № 419446, кл. В 65 G П/бо, 1976 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый подъемник | 1976 |
|
SU574386A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Окрасочно-сушильный агрегат | 1987 |
|
SU1520808A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| СПОСОБ СУХОГО ХРАНЕНИЯ ОТРАБОТАВШЕГО ЯДЕРНОГО ТОПЛИВА И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2519248C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Склад для хранения цилиндрических изделий | 1982 |
|
SU1036628A1 |
| Пространственная транспортная система | 1981 |
|
SU982991A1 |
| Транспортная тележка | 1987 |
|
SU1459962A1 |


StiSK iSt Mfff f f - - -:
Фиг. 5
Шиг.Ь
/f
(Du.f
