жит логический блок, дешифрующую следящую систему, второй и третий датчики обратной связи и переключатель, входы которого соединены с выходом логического блока и выходом второго датчика обратной связи, а выход подключен к соответствующему входу счетно-решающего блока, выход которого однов;ременно соединен с входом логического блока, другие входы логического блока связаны с выходом третьего датчика обратной связи и усилителя мощности, а выход через дешифрующую следящую систему соединен одновременно с входами второго и третьего датчиков обратной связи.
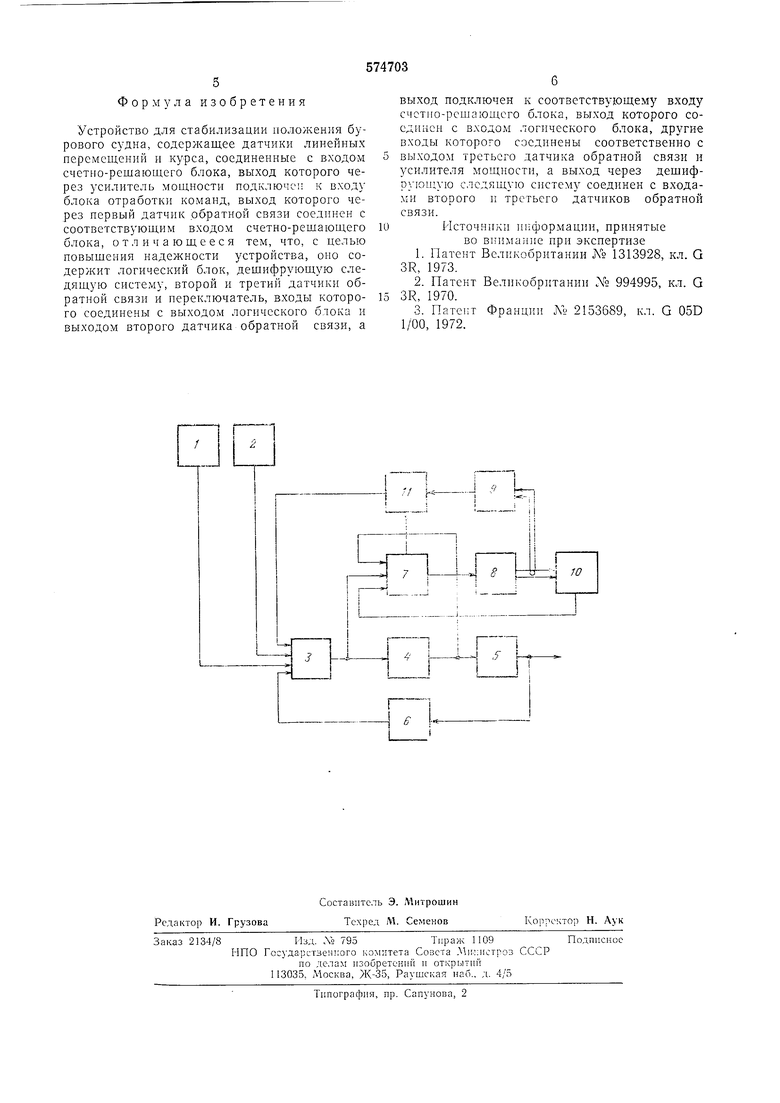
Блок-схема устройства приведена на чертеже.
Устройство содержит датчики линейных перемеще«ий 1 и курса 2, соединенные со счетно-решающим блоком 3, через усилитель 4 мощности подключенным к блоку 5 отработки команд, выход которого через первый датчик 6 обратной связи соединен с соответствующим входом счетно-решающего блока 3.
В устройство также введен логический блок 7, выход которого через дешифрующую следящую систему 8 соединен одвовременно с вторым датчиком 9 обратной свяаи (вращающимся трансформатором) и третьим датчиком 10 обр.атной связи (потенциометром), и переключатель 11, входы которого связаны с выходом логического блока 7, а выход подключен к входу счетно-решающего блока 3.
Работает устройство следующим образом.
При нормальной работе датчиков 1 и 2 измеренные ими сигналы линейных перемещений и по курсу при изменении заданного положения судна относительно точки работ на морском дне поступают на счетно-решающий блок 3,. где преобразуются, масштабируются в соответствии с принятыми законами стабилизации и затем через усилитель 4 мощности перемещаются на блок 5 отработки команд, вырабатывающий требуемые для стабилизации значения продольного и поперечного упоров и моментов, противодействующих внешним силам от ветра, течения и волнения моря.
Информация о значениях сформированных блоком 5 отработки команд сигналов подается через датчик 6 обратной связи на соответствующий вход счетно-решающего блока 3 для реализации принятых законов стабилизации судн.а. Одновременно с этим сигналы с выходов счетно-решающего блока 3 и усилителя , 4 мощности поступают на логический блок 7, где сравниваются, преобразуются в средние значения напряжений, пропорциональные текущим упорам и моментам при данных внешних воздействиях. Сигналы, пропорциональные средним значениям, попадают на вход дешифруюшей следящей системы 8, которая отрабатывает их в виде углов разворота датчиков 9 и 10 обратной связи.
С выхода датчика 10 обратной связи электрический сигнал постзпает на вход логического блока 7 для обеспечения нормальной работы дешифрЗ ющей следящей системы 8, а с выхода датчика 9 обратной связи- на вход переключателя И. Переключатель при нормальной работе датчиков линейных перемещений 1 и кзфса 2 не срабатывает, так как на второй его вход не поступает электрический сигнал с первого выхода логического блока 7. Электрический сигнал на этом выходе равен нулю, если при выполнении на его входе сравнения одновременно существуют сигналы от счетно-решающего блока 3 и усилителя 4
мощности, что является критерием нормальной работы датчиков линейных перемещений 1 и курса 2.
При отказе датчиков линейных перемещений 1 и курса 2 на первом выходе логического блока 7 имеет место сигнал, который, поступая на переключатель II, осуществляет подключение его к дополнительному входу счетно-решающего блока 3 и тем самым переводит устройство в режим работы по сигналам от датчика 9 обратной связи. Такое управление по «запомненным упорам и моментам продолжается до тех пор, пока не восстановится работоспособность отказавших датчиков 1, 2, либо до такого момента времени, когда удержание судна при изменившихся внешних воздействиях станет практически нецелесообразным.
Таким образом, управление по средним
упорам и моментам через логический блок 7, дешифрующую следящую систему 8, датчики 9 и 10 обратной связи и переключатель И и далее через счетно-решающий блок 3 обеспечивает режим автоматической стабилизации
еудна над точкой работ в случае возникновения аварийной ситуации, связанной с выходом из строя датчиков линейных перемещений и курса..
Обеспечение указанного режима стабилиза-ции с помощью предложенного устройства, вотличие от известных систем и устройств, позволяет проводить в районе работ автоматическое удержание судна с одновременным проведением восстановительных работ но работоспособности отказавших датчиков в течение необходимого времени. При этом исключаетсявозможность поломки и потери дорогостоящего подводного оборздования, не прерывается режим ста.билизаздии параметров, судна,
что повышает надежность работы и техникоэкономические показатели эксплуатации .судна в реальных условиях.
Техническая реализация операционного усилителя, дешифрующей следящей системы, вра-шающегося трансформатора, потенциометра и переключателя требует по сравнению со стоимостью устройства стабилизации в целом, сравнительно малых затрат (менее 1%) и мо-. жет быть осуществлена на элементах автоматики, широко освоенных промышленностью.
Формула изобретения
Устройство для стабилизации положения бурового судна, содержащее датчики линейных перемещений и курса, соединенные с входом счетно-решающего блока, выход которого через усилитель мощности подключен к ВХОД}
блока отработки команд, выход которого через первый датчик обратной связи соединен с соответствугоишм входом счетно-рещающего блока, отличающееся тем, что, е целью повышения иадежности устройства, оио содержит логичеекий блок, дешифрующую следящую систему, второй и третий датчики обратной связи и переключатель, входы которого соедииены с выходом логического блока и выходом второго датчика обратной связи, а
выход подключен к соответствующему входу счетно-решающего блока, выход которого соеднисн с входом логического блока, другие входы которого соединены соответственно с выходом третьего датчика обратной связи и усилителя мощности, а выход через дешифрующую следящую систему соединен с входами второго и третьего датчиков обратной связи.
Источники информации, принятые во В П1ма}1ие при экспертизе
1.Патент Великобритании Ло 1313928, кл G 3R, 1973.
2.Патент Великобритании .Yg 994995, кл. G 3R, 1970.
3.Патент Франции До 2153689, кл. G 05D 1/00, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления положением бурового судна | 1976 |
|
SU753715A1 |
| Система для динамической стабилизации судна | 1980 |
|
SU878646A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| Система автоматической стабилизации судна без хода | 1976 |
|
SU583032A1 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
| Система автоматического управления скоростью вращения ротора турбины | 1980 |
|
SU866247A2 |
| Система регулирования | 1977 |
|
SU732824A1 |
| Регулятор | 1977 |
|
SU648941A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СУДОВОЕ АВТОМАТИЧЕСКОЕ РУЛЕВОЕ УСТРОЙСТВО | 1966 |
|
SU180974A1 |
