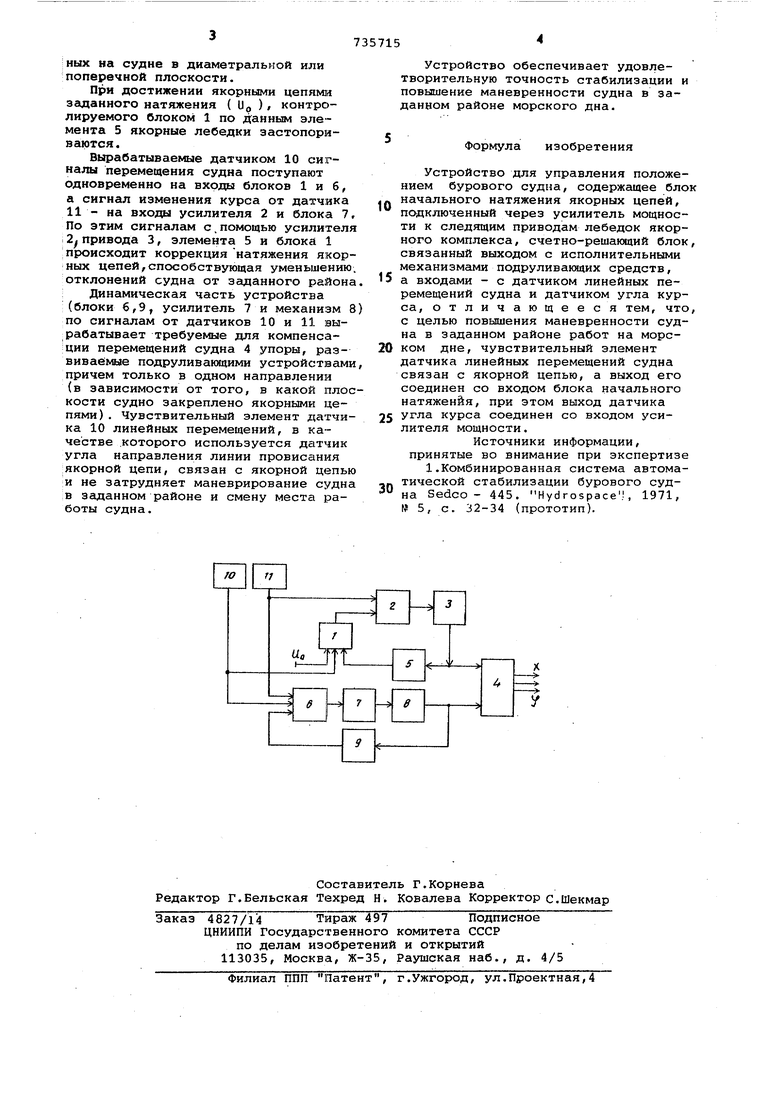
Изобретение относится к буровой автоматике и, в частности используется для управления положением бурового судна в заданном районе морского дна. Известно устройство для управлени положением бурового судна, содержаще блок начального натяжения якорных це пей, подключенный через усилитель мсяцности к следящим приводам лебедок якорного комплекса, счетно-решакиций блок, связанный выходом с исполнительными механизмами подруливающих средств, а входами - с датчиком линейных перемещений судна и датчиком угла курса 1 . Недостатком известного устройства является низкая маневренность судна при работе его в заданном районе морского дна, вызванная большим количеством якорных цепей и гидроакустическим выполнением датчиков переме щения судна. Цель изобретения - повьлшение мане ренности судна в заданном районе ра бот на морском дне. Цель достигается тем, что чувстви тельный элемент датчика линейных перемещений судна связан с якорной . цепью, а выход его соединен со входом блока начального натяжения, при этом выход датчика угла курса соединен со входом усилителя мощности. На чертеже представлена структурная схема устройства. Устройство содержит блок 1 начального натяжения якорных цепей, подключенный через усилитель 2 мощности к следящим приводам 3 лебедок якорного комплекса судна 4 с элементом 5 обратной связи, счетно-решающий блок 6, связанный выходом через усилитель 7 с исполнительными механизмами 8 подруливающих средств , снабженных блоком 8 обратной связи, выход которого подключен к одному из входов блока 6, к двум другим входам которого подключены датчик 10 линейных перемещений судна и датчик 11 угла курса. Выход датчика 10 подключен также к одному из входов блока 1, а выход датчика 11 - ко входу усилителя 2 мощности. Устройство работает следукицим образом. При подходе к заданному району работ судно производит заякоривание с помощью якорных цепей, закреплен;ных на судне в диаметральной или поперечной плоскости.
При достижении якорными цепям1д заданного натяжения ( U ), контролируемого блоком 1 по данным элемента 5 якорные лебедки застопориваются.
Вырабатываемые датчиком 10 сигналы перемещения судна поступают одновременно на входы блоков 1 и б, а сигнал изменения курса от датчика 11 - на входы усилителя 2 и блока 7. По этим сигналам с,помощью усилителя 2у привода 3, элемента 5 и блоке 1 происходит коррекция натяжения якорных цепей,способствующая уменьшению, отклонений судна от заданного района
Динамическая часть устройства (блоки 6,9, усилитель 7 и механизм 8 по сигналам от датчиков 10 и 11 вырабатывает требуемые для компенсации перемещений судна 4 упоры, развиваеладе подруливаницими устройствами причем только в одном направлении (в зависимости от того, в какой плоскости судно закреплено якорными цепями) . Чувствительный элемент датчика 10 линейных перемещений, в качестве которого используется Дс1ТЧИК
угла направления линии провиссшия якорной цепи, связан с якорной цепью и не затрудняет маневрирование судна в заданном районе и смену местс1 работы судна.
Устройство обеспечивает удовлетворительную точность стабилизации и повышение маневренности судна в заданном районе морского дна.
Формула изобретения
Устройство для управления положением бурового судна, содержащее блок
начального натяжения якорных цепей, подключенный через усилитель мощности к следящим приводам лебедок якорного комплекса, счетно-решающий блок, связанный выходом с исполнительными механизмами подруливакидих средств,
а входами - с датчиком линейных перемещений судна и датчиком угла курса, отличающееся тем, что, с целью Повышения маневренности судна в заданном районе работ на морском дне, чувствительный элемент датчика линейных перемещений судна связан с якорной цепью, а выход его соединен со входом блока начального натяжения, при этом выход датчика
угла курса соединен со входом усилителя мощности.
Источники информации, принятые во внимание при экспертизе 1.Комбинированная система автоматической стабилизации бурового судна Sedco - 445. Hydrospace, 1971, № 5, с. 32-34 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации положения бурового судна | 1974 |
|
SU574703A1 |
| СПОСОБ СОЗДАНИЯ ПЛАВУЧЕГО ПОЛУПОГРУЖНОГО БУРОВОГО СУДНА И ЕГО УСТРОЙСТВО | 2013 |
|
RU2524700C1 |
| Регулятор | 1977 |
|
SU648941A1 |
| ПЛАВУЧАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2173280C2 |
| Система автоматической стабилизации судна без хода | 1976 |
|
SU583032A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| СПОСОБ УДЕРЖАНИЯ СПАСАТЕЛЬНОГО СУДНА НАД АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2510350C2 |
| Способ управления судном в режиме без хода | 1978 |
|
SU766958A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
