Изобретение относится к судовой автоматике и может быть использовано при создании систем для динамической стабилизации по линейным перемещениям и курсу судов или иных объектов, оснащенных активными средствами управления.
Известна система для динамической стабилизации судна, содержащая датчик линейных координат положения, два датчика программных значений линейных координат и датчик программного курса, выходы которых подключены к соответствующим входам блоков сравнения, датчик курса, выход которого через один из дифференцирующих блоков подключен к первым двум входам счетно-решающего блока, а два выхода последнего соединены с двумя входами блока управления, выход которого подключен ко входу датчика обратной связи, а выход последнего соединен с третьим входом счетно-рещающего блока 1.
Недостатком указанной системы является влияние изменения курса судна при рыскании или маневрировании на точность его удержания по линейным координатам, вызываемого отличием систем отсчета истинных и заданных значений этих координат.
Задаваемые вручную.программные значения линейных координат местоположения судна остаются неизмененными в процессе
стабилизации, что соответствует их заданию в неподвижной относительно морского дна системе координат. Измеряемые же гидроакустическим датчиком в связанных с судном осях сотавляющие расстояние до устанавленного на грунте маяка меняются по величине и направлению при рыскании или маневрировании судна по курсу, даже если смещения самого судна относительно
10 заданной точки на грунте и не происходит. Поэтому при цревыщении рыскания судна по курсу на 3° и более в системе возникают значительные ощибки стабилизации по линейным координатам, что может отрица15тельно повлиять на успещное выполнение производимых работ.
Цель изобретения - повышение точности.
Поставленная цель достигается тем, что система снабжена тремя преобразователя20ми координат, первые входы которых подключены к выходу датчика курса, второй и третий входы первого преобразователя соединены с выходами датчика линейных
25 координат положения, а каждый из двух выходов его подключен к соответствующим вторым входам блоков сравнения и ко входам дифференцирующих блоков, второй и третий входы второго преобразователя соединены с соответствующими выходами бло30
мав сравнения, а два ею выхода подключены к четвертому и пятому входам счетнорешающего блока, второй и третий входы третьего преобразователя подключены к соответствующим выходам дифференцирующих блоков, а два его выхода соединены с шестым и седьмым входами счетно-решающего блока.
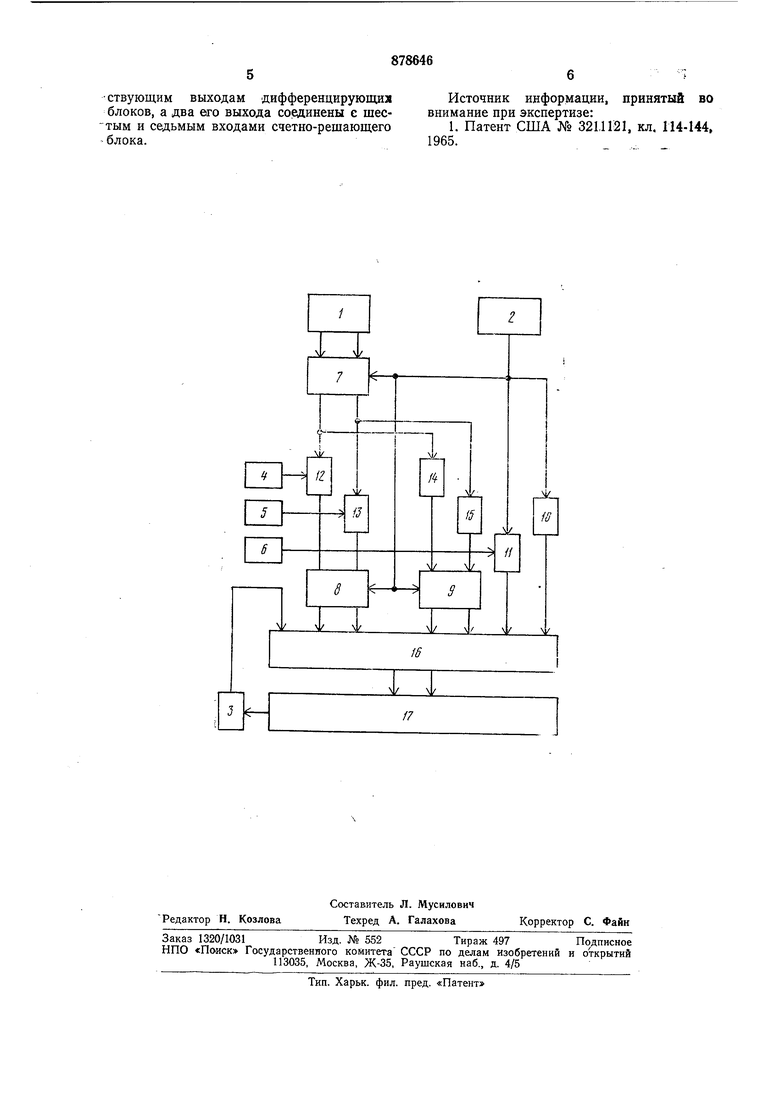
На чертеже представлена блок-схема системы для динамической стабилизации судна.
Система содержит датчики: 1 - линейных координат положения, 2 - курса, 3 - обратной связи, 4 и 5 - программных значений линейных координат, 6 - программного значения курса.
Два выхода датчика 1 линейных координат положения подключены ко второму и третьему входам преобразователя координат 7. Выход датчика 2 курса подключен к первым входам преобразователей координат 7, 8, 9, входу дифференцирующего блока 10 и к блоку сравнения 11.
Датчики 4, 5 программных значений линейных координат подключены соответственно к блокам сравнения Ш, 13. Датчик 6 программного значения курса подключен к блоку сравнения 11.
Два выхода преобразователя координат 7 подключены к блокам сравнения 12, 13 и одновременно к дифференцирующим блокам 14, 15.
Выходы блоков сравнения 12, 13 подключены ко второму и третьему входам преобразователя координат 8. Выходы дифференцирующих блоков 14, 15 подключены ко второму и третьему входам преобразователя координат 9.
Выходы датчика 3 обратной связи, преобразователей координат 8, 9, дифференцирующего блока 10 и блока сравнения 1.1 подключены ко входам счетно-решающего блока 16,
Входы блока управления 17 связаны с выходами блока 16, а выход их подключен ко входу датчика 3 обратной связи.
Система работает следующим образом.
Поступающие от датчика 1 сигналы линейных координат положения судна, изменяемые в связанных с ним осях, преобразуются преобразователем координат 7 в сигналы в неподвижных осях, фиксированных относительно морского дна (например, север - юг, восток - запад), свободные от влияния изменения курса.
В блоках 12, 13 они сравниваются с программными значениями координат пО ложения, поступающими с датчиков 4, 5 для получения составляющих линейного отклонения судна от заданного, и в блоках 14, 15 дифференцируются для получения составляющих линейной скорости его перемещения.
Поступающие от датчика 2 курса сигналы курса дифференцируются в блоке 10
для получения угловой скорости судна и сравниваются в блоке 11 с программными значениями курса, поступающими с датчика 6, для получения величины углового от5 клонеиия по курсу.
Полученные в неподвижных осях сигналы линейных отклонений и скоростей судна преобразуются преобразователями координат 8, 9 в связанные оси и поступают
10 наряду с сигналами угловых отклонений и скорости и сигналами обратной связи с датчика 3 на входы счетно-рещающего блока 16, где по ним формируются сигналы управления перемещениями судна в про5 дольном, боковом направлениях и по курсу. В соответствии с выработанными в блоке 16 сигналами управления блок управления 17 развивает упоры и момент, возвращающие судно в заданное положение.
0 Таким образом, введение в систему преобразователей координат существенно повышает точность динамической стабилизации, так как позволяет исключить влияние рыскания или маневрирования судна на
25 точность вычисления составляющих его линейного отклонения и скорости и обеспечивает возможность автономного управления судном в продольном, боковом направлениях и по курсу.
Формула изобретения
Система для динамической стабилизации судна, содержащая датчик линейны координат положения, два датчика программных значений линейных координат и датчик программного курса, выходы которых подключены к соответствующим входам блоков сравнения, датчик курса, выход которого через один из блоков сравнения и один из дифференцирующих блоков подключен к первым двум входам счетнорешающего блока, а два выхода последнего соединены с двумя входами блока управления, выход которого подключен ко входу датчика обратной связи, а выход последнего соединен с третьим входом счетно-рещающего блока, отличающаяся тем,
0 что, с целью повыщения точности, система снабжена тремя преобразователями координат, первые входы которых подключены к выходу датчика курса, второй и третий входы первого преобразователя соединены с
5 выходами датчика линейных координат положения, а каждый из двух выходов его подключен к соответствующим вторым входам блоков сравнения и ко входам дифференцирующих блоков, второй и третий входы второго преобразователя соединены с соответствующими выходами блоков сравнения, а два его в.ыхода подключены к четвертому и пятому входам счетно-решающего блока, второй и третий входы третьего преобразователя подключены к соответствующим выходам дифференцирующих блоков, а два его выхода соединены с и седьмым входами счетно-решающего блока.
Источник информации, принятый во внимание при экспертизе:
1. Патент США № 3211121, кл. 114-144, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической стабилизации судна без хода | 1976 |
|
SU583032A1 |
| Устройство для стабилизации положения бурового судна | 1974 |
|
SU574703A1 |
| Система автоматического удержания судна над заданной точкой морского дна | 1977 |
|
SU944988A1 |
| Система управления движением судна | 1978 |
|
SU717730A1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| Система динамической стабилизации судна | 1985 |
|
SU1308040A1 |
| Измеритель местоположения бурового судна | 1983 |
|
SU1134928A1 |
| Устройство для управления положением бурового судна | 1976 |
|
SU753715A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Авторулевой | 1979 |
|
SU842725A1 |
