1
Изобретение относится к области автоматического управления и может быть использовано в качестве интегрирующих приводов и регуляторов скорости в условиях повышенных требований к точности работы.
Известны устройства автоматики для регулирования скорости, в которых управ ляюший сигнал поступает на вход усилителя, последовательно соединенного с двигателем, передающим вращение через редуктор на нагрузку. Для достижения равномерной с корости вращения вала нагрузки применяются устройства компенсадии, состоящие из датчиков углового положения вала двигателя и нагрузки. Разность угловых
положений после преобразования поступает на дополнительный вход усилителя в виде обратной связи ij.
Наиболее близким по технической сущности к изобретению является интергирующий привод, содержащий первый сумматор, выход клторого через последовательно соединенные первый усилитель и двигатель подключен ко входному валу редуктора, гахогенератор и первый датчик угла, соедине
пые С валом двигателя, второй датчик угла, соединенный с выходным валом редуктора, и задающее устройство. Выходы задающего устройства и тахогенератора подключены ко входам первого сумматора, а выходы первого и второго датчиков углако входам второго сумматора. этих устройствах введение компенсирующих воздействий до редуктора приводит к тому, что компенсация упругих, деформаций и люфтов не эффективна, а скорость вращения вала нагрузки неравномерна.
Целью изобретения является уменьшение неравномерности скорости вращения вала нагрузки.за счет более эффективной компенсации упругих деформаций и люфгов, вызываемых изменениями нагрузки и задающего воздействия в процессе работы интегрирующего привода.
Поставленная цель достигается тем, что в предложенный привод дополнительно введены второй усилитель, электрогидравлический преобразователь и корректирующий двигатель. Выход второго сумматора через последовательно соединенные второй усилитель
1 элокгрогидраплнческнй преобра: О 5агель подсоединен к управляющему входу корректирующего дпнгагеля, включеииогч) между вь-,чодиг м налом редуктора и волом объекта рогулироиания, а также тем, что корректирующий двигатель (ыполиек в виде гндроцилиндра с поворогной лопастью.
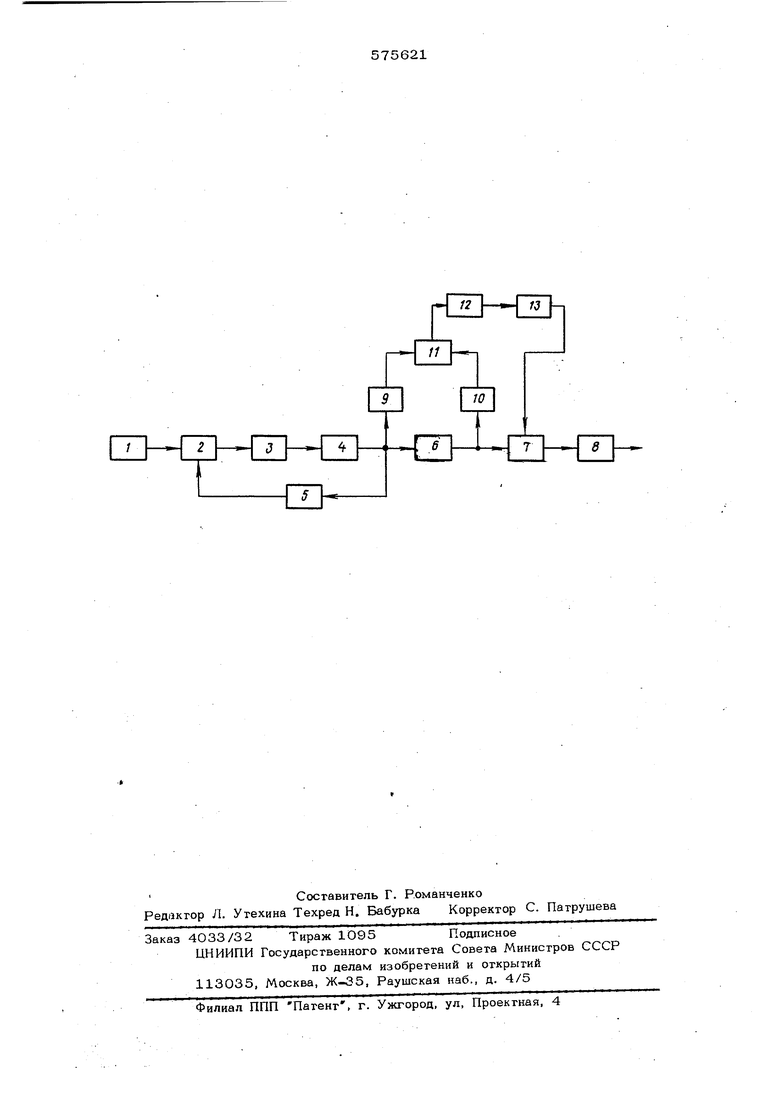
1уикциоиплы1ая схема гфн(еда представлена на чертеже.
Привод содержит задающее устройство 1 первый сумматор 2, первый .усилитель 3, двигатель Л с тахогеиератором 5, редуктор G, корректируюишй двигатель 7., выполненный 13 видегпдроцилиндра с -йоворотпой лоштстью, и объект 8 регулироаания . Лля Етгмерения погрешности в угловом положении входного и «ыхопиого валов редуктора установлены первый О и второй 10 датчики угла и второй сумматор 11. Ошибка рассогласования подается через второй усилитель 12 на электрогидравлический преобразователь 13.
Устройство работает следующим образом
При подаче управляющего сигнала с усгройстьа 1 на вход сумматора 2 на выходе двигателя 4 устанавливается некоторое постоянное значение скорости. Е;сли угловые положения входного и вьгход}1ого валов редуктора совпадают, то сигнал управления каналом компенсации, формируемый датчиками угла 9 и 10 и сумматором 11, равен нулю.
При появлении углового рассогласовании из-за наличия люфтов, упругих деформаций в редукторе и возмущений, связанных с нагрузкой, сигнал рассогласованияканала компенсации поступает через усилитель 12 на преобразователь 13, управляющий корректирующим двигателем,который обеспе чивает пропорциональное управление. Таким образом, выходной сигнал интегрирующего привода суммируется с компенсирующей добавкой. Путем изменения коэффициентов npeo6pa3OBatui5i капала компенсации компен- сируЬщая добавка устанавливается равной по величине и знаку угловому рассогласованию. В результате сложе)1ия текущего
углового положения выходного вала редуктора с компенсирующей добавкой, вводимой корректирующим двигателем (с помощью поворотной лопасти гидроцилирщра), влияние люфтов, упругих деформаций и возмущений, связанны.х с нагрузкой, устраняется, и существенно уменьшается неравномерность скорости вращения вала нагрузки.
Ф
ормула изобретения
1.Интегрирующий привод, содержащий 5 первый сумматор, выход которога через
пос/ едовательно соединенные первьгй усили-тель и двигатель подключен к входному валу редуктора, тахогенеыератор и первый датчик угла, соединенные с валом днигаге-
20 ля, второй датчик угла, соедине}11Г1.1й с выходным Вг.лом редуктора, и задающее устройство, выходы которого и выходы гахо- генератора подключены ко входам первого сумматора, а выходы первого и второго
25 датчиков угла - ко входам второго сумматора,, отличающийся тем, что, с целью уменьшения неравномерности вращени вала объекта регулирования, он содержит второй усилитель, электрогидравлический
30 преобразователь и корректируюишй двш-ать-ль выход второго сумматора через последовательно соединенные второй усилитель и электрогидравлический преобразователь подсоединен к управляющему входу корректирующего двигателя, включенного между выходньгм валом редуктора и валом объекта регулирования.
2.Привод по п. 1, отличающийся тем, что корректирующий двига-
40 тель выполнен L виде гидроцилиндра с иов(ротной лопастью.
Источники информации, принятые во внимание при экспертизе;
1.Авторское с)1ИДетельст15О СС(.1
45 № 302U91, кл. ( ОГ) В 11/(Л, 3(J.O-1.7U.
2.Авторское свидетельство C(Ci
№ 33455(J, кл. С 05 l.i 13/О2, 04.О.}.71.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1980 |
|
SU885970A1 |
| Следящая система | 1981 |
|
SU1012197A1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |