1
Изобретение относится к программным системам управления и может быть использовано, например для управления промышленными работами.
Известны электрогидравлические следяид,ие приводы с шаговым двигателем и гидравлическим усилителем.
Известны также электрогидравлические системы числового программного управления с шаговыми двигателями и гидравлическими усилителями.
Наиболее близким техническим решением к данному является электрогидравлическое многокоординатное управляюшее устройство, содерл аш,ее последовательно включенные программный блок и блок управления, выходы которого подключены к шаговым двигателям, связаппым с соответствуюгцими распределительными золотниками, соединенными с гидроцилиндрами по числу координат управления, связанными между собой рычажной передачей, и узлы обратной связи.
-Известное устройство является сложным и обладает невысоким быстродействием и низкой точностью.
С целью повышения быстродействия и точности работы в предлагаемом устройстве каждый узел обратной связи состоит из поворотного ролика, охваченного несколькими
витками гибкого троса, причем гибкие тросы соединены соо ветственно со шпиком одного из гидроцилиндров и рычажной передачей, а поворотные ролики связаны с распределительными золотниками.
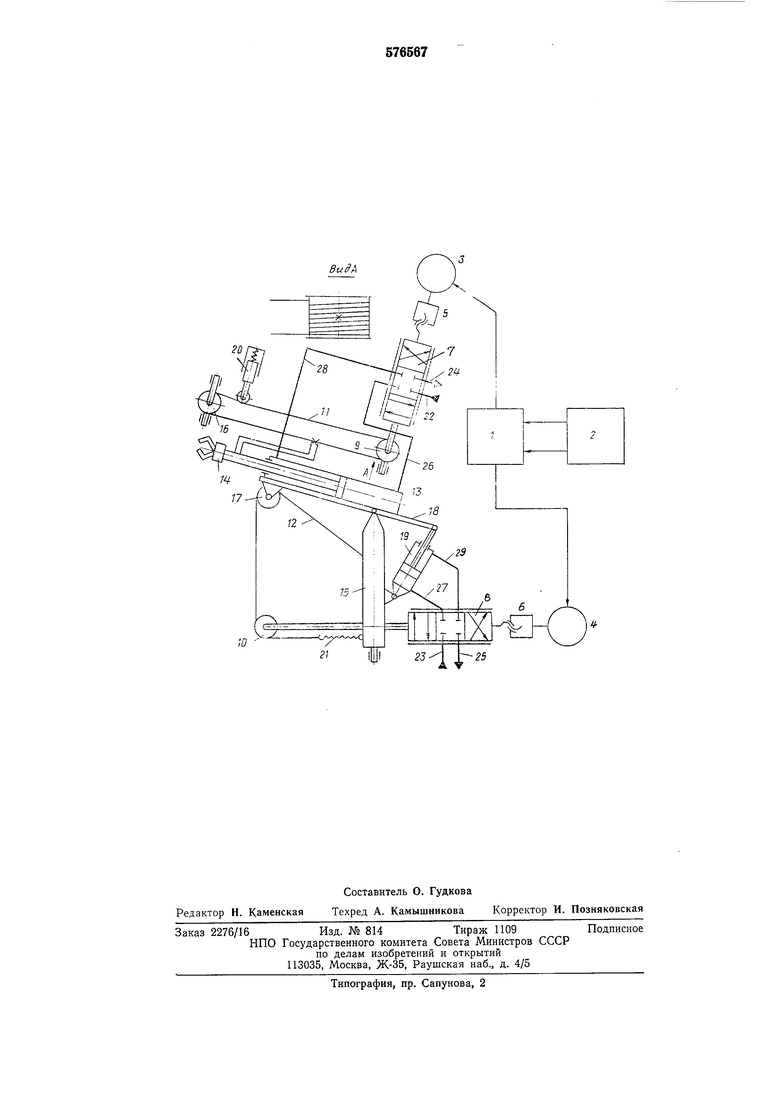
На чертеже показана схема устройства. Выходы блока управления 1, соединенного с нрограммиым блоком 2, соединены с шаговыми двигателями 3 п 4, валы которых жестко связаны с гайками винтовых преобразователей 5 и 6. На выходных валиках распределительиых золотников 7 п 8 иасажены поворотные ролики 9 и 10, связанные надетыми на них гибкими тросами 11 и 12, соответственно,
со штоком гидроцилиндра 13, приводящим в движение рабочий орган 14, и рычажной передачей 15, причем тросы охватывают ролики несколькими витками п закреплены от проскальзывания па поворотных роликах (впд
А). Тросы охватывают роликп 16 и 17, последний укреплен на стреле 18 рычажной передачи 15, приводимой в движение гидроцилипдром 19. Для выбора прослабленпя тросов и создания их предварительного натяжения слулчат натяжные устройства 20 и 21. Трубопроводы 22 п 23 предназначены для подвода рабочей жидкости, а линии 24 и 25- для слива. Норшневые полости гидроцилипдров соединены с распределительными золотниками трубопроводами 26 и 27, штоковые - трубопроводами 28 и 29.
Число гидроцилиндров равно числу координат управления (в данном случае их две). Каждой координате соответствует узел обратной связи, состоящий из ролика 9 (10) и троса И (12).
Работу устройства рассмотрим на примере привода радиального перемещения рабочего органа. Блок управления, в соответствии с программой, содержащейся в программном блоке 2, подает электрические импульсы на вход DjaroBoro двигателя 3, вал которого вместе с гайкой винтового преобразователя 5 поворачивается на угол, пропорциональный числу поданных импульсов. При этом смещается распределительный золотник 7, открывая дросселирующие щели. Рабочая жидкость под давлением по трубопроводам 22 и 26 подводится, например в поршневую полость гидроцилиндра 13. Его штоковая полость при этом линиями 23 и 24 через щели золотникового устройства соединяется со сливом. Благодаря создавшемуся перепаду давления шток вместе с рабочим органом 14 идет вперед и тянет за собой трос И, вращающий ролики 16 и 9 вместе с винтом винтового преобразователя 5. Распределительный золотник 7 возвращается при этом в нейтральное положение. В установившемся режиме золотник смещен от нейтрального положения на постоянную величину. После остановки шагового двигателя 3 шток гидроцилиндра 13, а вместе с ним и распределительный золотник 7, движутся до тех пор, пока не закроются дросселирующие щели. В этот момент поршень останавливается, так как полости гидроцилиндра оказываются запертыми. Расстояние, на которое переместится рабочий орган 14, пропорционально полному числу импульсов, поданных на вход шагового двигателя, а частота импульсов определяет скорость перемещения
рабочего органа. Обратный ход осуществляется аналогично.
Привод перемещения рабочего органа промышленного робота по углу места работает 5 аналогичным образом, причем поступательное движение штока гидроцилиндра 19 преобразуется в угловое перемещение рабочего органа при помощи стрелы 18 рычажной передачи 15, а обратная связь осуществляется путем 0 перемещения связанного со стрелой 18 ролика 17, который изменяет положение троса 12, поворачивающего ролик 10 и связанный с ним БИНТ винтового преобразователя 6.
В соответствии с приведенной схемой могут 5 быть организованы приводы и по другим координатам, например поворот рабочего органа по азимуту. В качестве распределительного золотника может быть использован осевой золотник серийно изготовляемого электрогид0 равлического усилителя.
Предлагаемая система имеет преимущества, заключающиеся в более высокой скорости и точности перемещения рабочего органа.
Формула изобретения
Электрогидравлическое многокоординатное управляющее устройство, содержащее последовательно включенные программный блок и блок управления, выходы которого подключены к шаговым двигателям, связанным с соответствующими распределительными золотниками, соединенными с гидроцилиндрами по числу координат управления, связанными между собой рычажной передачей, и узлы
5 обратной связи, отличающееся тем, что, с целью повышения быстродействия и точности устройства, в нем каждый узел обратной связи состоит из поворотного ролика, охваченного несколькими витками гибкого троса, причем гибкие тросы соединены соответственно со штоком одного из гидроцилиндров и рычажной передачей, а поворотные ролики связаны с распределительными золотниками.
Вид
ЦТ 2J
25
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор скорости вращения | 1983 |
|
SU1116418A1 |
| Система управления манипулятором | 1980 |
|
SU884997A1 |
| Система управления манипулятором | 1981 |
|
SU990503A2 |
| Электрогидравлический шаговый привод | 1971 |
|
SU481712A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Следящий привод | 1978 |
|
SU751620A1 |
| Электрогидравлический следящий привод | 1978 |
|
SU785560A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСКРЕТНЫЙ ПОВОРОТНЫЙ ПРИВОД | 2016 |
|
RU2642010C1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |