(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1971 |
|
SU311850A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| ГРУППОВОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1999 |
|
RU2170698C1 |
| Захват-кантователь к погрузчику | 1987 |
|
SU1504213A2 |
| Захватное устройство для штучных грузов | 1980 |
|
SU906897A1 |
| Захватное устройство "кондок" к погрузчику | 1977 |
|
SU658081A1 |
| Траверса для кантования грузов | 1989 |
|
SU1703601A1 |
| Грузозахватное устройство | 1977 |
|
SU709500A1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Захват-кантователь | 1980 |
|
SU992388A1 |
1
Изобретение относится к области подъемно-транспортной техники, а именно к съемным грузозахватным устройствам и приспособлениям.
По основному авт. св. № 31185О известно грузозахватное устройство в виде параппепограммного механизма с папами, выполненными из отдельных частей, шарнирно соединенных между собой и стягиваемых упругим элементом так,, что лапа имеет криволинейную форму. Однако такое устройство не исключает возможности повреждения захватываемого груза так как изделие захватывается только за счет механического воздействия со стороны захватных лап .
Цель изобретения - исключение повреждения грузов, имеющих небольшую жесткость и прочность и обеспечение захвата грузов сложной конфигурации.
Это достигается тем, что на каждой отдельной составной части захватных лап установлены одна ипи несколько полых эластичных камер, соединенных посредством трубопровода с источником жидкости регулируемого давления, например, гидросистемой авто - или электропогрузчика.
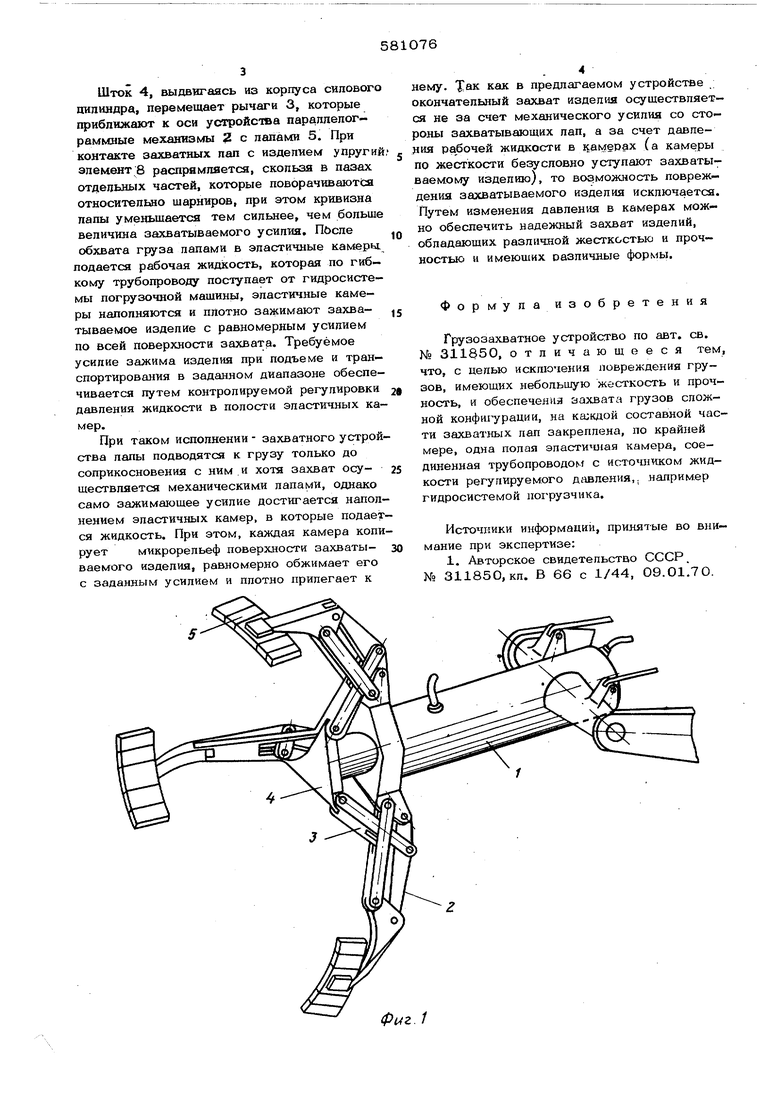
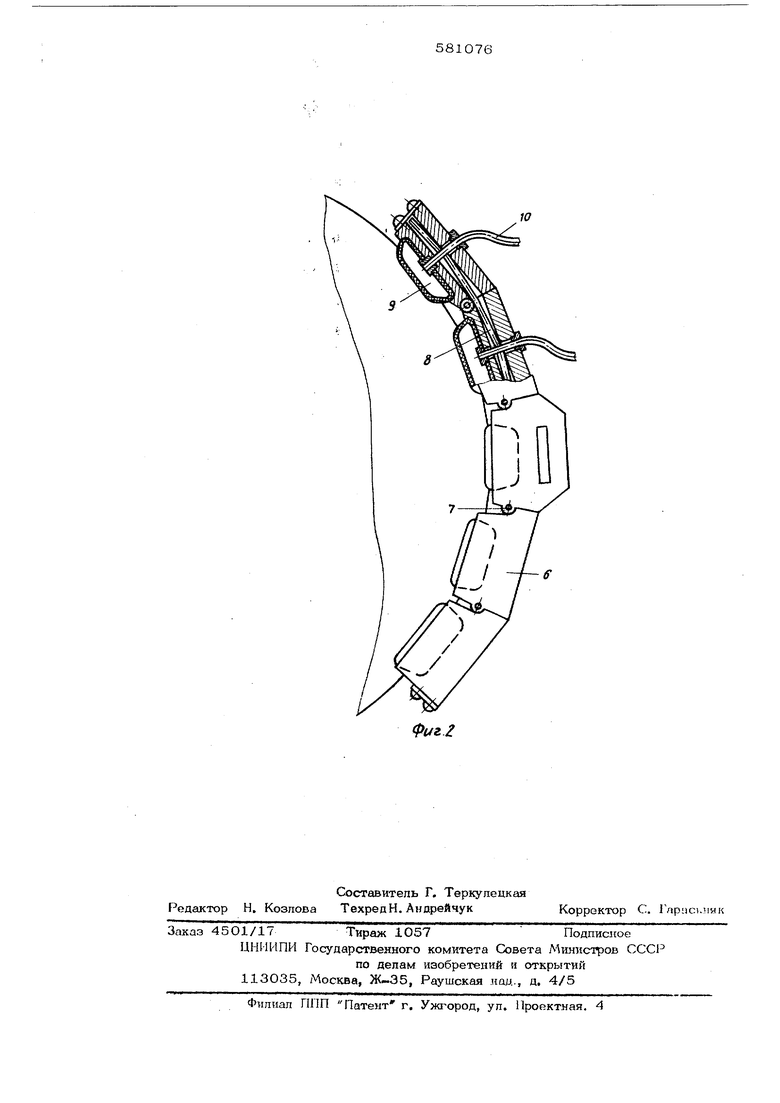
На фиг. 1 показано грузозахватное устройство, общий вид; на фиг, 2 - захватная лапа.
Устройство включает силовой цилиндр 1, на корпусе которрго укреплены рычажные паралаепограммные механизмы 2, соединенные рычагами 3 со штоком 4 циг1индра. На паралпепограммные механизмы навешены захватные лапы 5. Каждая папа состоит из отдельных частей 6, связанных между собой шарнирами 7 и стянутых упругим элементом 8 в виде плоской пружины так, что лапа приобретает криволинейную, форму.
На каждой из отдельных частей 6 папы 5 установлена одна или несколько эпастичных камер 9. Эластичные камеры соедшю- ны между собой посредством гибкого трубопровода 10, причем распредепительный трубопровод соединен с источником давления жидкости, например с гидроситемой авто - или электропогрузчгпса.
Устройство работает спедующим образом. Шток 4, выдвигаясь на корпуса силового пипиндра, перемещает рычаги 3, которые приближают к оси устройства параллепограммвые механизмы с папами 5. При контакте захватных пап с изделием упруги элемент 8 распрямляется, скользя в пазах отдельных частей, которые поворачиваются относительно шарниров, при этом кривизна лапы уменьшаетгся тем сильнее, чем больше величина захватываемого усилия. Пбсле обхвата груза лапами в эластичные камеры подается рабочая жидкость, которая по гиб кому трубопроводу поступает от гидросистемы погрузочной машины, эластичные камеры наполняются и плотно зажимают захватываемое изделие с равномерным усилием по всей поверхности захвата. Требуемое усилие зажима изделия при подъеме и транспортирования в заданном диапазоне обеспечивается путем контролируемой регулировки давления жидкости в полости эластичных камер. При таком исполнении - захватного устрой ства лапы подводятся к грузу только до соприкосновения с ним .и хотя захват осу- ществляется механическими лапами, однако само зажимающее усилие достигается наполнением эластичных камер, в которые подает ся жидкость. При этом, каждая камера копи рует микрорельеф поверхности захватываемого изделия, равномерно обжимает его с заданным усилием и плотно прилегает к . нему. как в предлагаемом устройстве окончательный захват изделия осуществляется не за счет механического усилия со стооны захватывающих лап, а за счет давлеия рабочей жидкости в камерах (а камеры по жесткости безусловно уступают захватываемому изделию), то возможность повреждения захватываемого изделия исключается. Путем изменения давления в камерах можно обеспечить надежный захват изделий, обладающих различной жесткостью и прочностью и имеющих различные формы. Формула изобретения Грузозахватное устройство по авт. св. № 311850, отличающееся тем, что, с целью исключения повреждения грузов, имеющих небольагую жесткость и прочность, и обеспечения захвата грузов сложной конфигурации, на ка;кдой составной части захватных лап закреплена, по крайней мере, одна полая эпастишая камера, соединенная тpyбoпpoвoдo f с источником жидкости регулируемого давления,; например гидросистемой погрузчика. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР. № 31185О, кл. В 66 с 1/44, 09.01ЛО. 1
10
фиг 2
