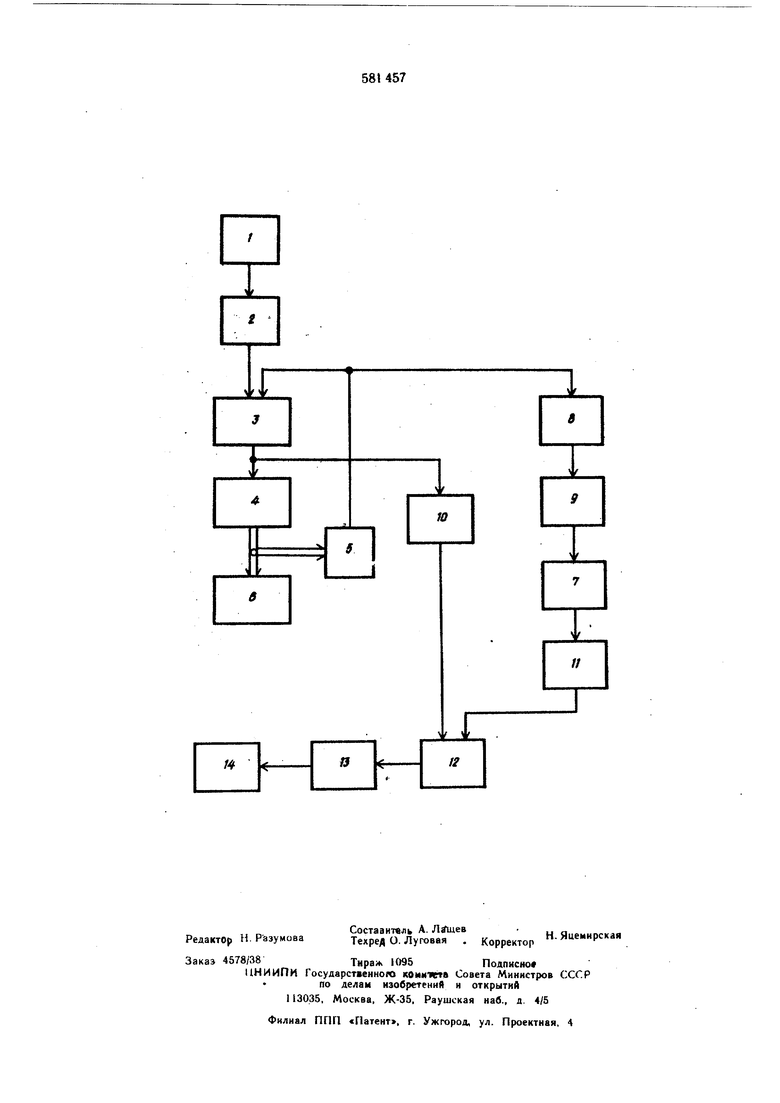
Изобретение относится к области автоматнки и может быть использовано в системах управления судовыми подвижными объектами. Известны устройстве, реагирующие на прешшенне объектом углов крена, дифферента нт д. I, 12 н 31. Из известных устройств для контроля исправности органа управления наиболее близким по технической сущиости является устройство, содержащее пороговые элементы, датчик сигнала управления, выход которого через первый формирователь сигнала подключен к первому входу суммирующего усилителя, второй вход которого соедннен с датчиком обратной связи, выход суммирующего усилителя подключен ко входу привода, который механически соедииен с датчиком обратной связи и органом управления, коммутирующий элемент, к выходу которого подключен индикатор отказа 3. Недостаток данного устройства заключается в его иизкой надежности. Цель изобретения - повышение надежиости устройства. Эта цель достигается благодаря тому, что известное устройство для контроля исправности органа управле1у1Я дополнительно содержит дифференцирующий элемент, элемент НЕ, второй формирователь сигнала и элемент И, к первому входу которого через последовательно соединенные элемент НЕ, пороговый элемент, второй формнрователь снгнала и дифференцирующий элемент подключен второй вход суммирующего усилителя, выход которого через второй пороговый элемент соединен со вторым входом элемента И, выход которого подключен ко входу коммутирующего элементаНа чертеже представлена структурная схема устройства для контроля исправности органа управления. Устройство содержит датчик сигнала управления 1, первый формирователь сигнала 2, суммирующий усилитель 3, привод 4, датчик с братиой связи 5, орган управления 6, пороговый элемент 7, дифференцирующий элемент 8, второй формирователь сигнала 9, второй пороговый элемент 10, элемент НЕ И, элемент И 12, коммутирующий элемент 13 и иидикатор отказа 14. Устройство работает следующим образом. Сигнал с датчика снгнала управления I через первый формирователь сигнала 2 поступает иа один из входов суммирующего усилителя 3, где сравнивается с сигналом датчика обратной связи 5, пропорциональным углу отклонения органа управления 6 со скоростью, пропорциональной разности между управляющим сигналом и сигналом обратной связи. Таким образом, при наличии сигнала на выходе суммирующего усилителя 3 орган управления 6 должен начать движение и, следовательно, должен существовать сигнал на выходе дифференцирующего элемента 8, так как сигнал на его выходе пропорционален скорости движения органа управления. Отсутствие сигнала на выходе дифференцирующего элемента 8 при наличии сигнала на выходе суммирующего усилителя 3 свидетельствует об отказе органа управления или его привода 4. Сигнал с выхода суммирующего усилителя 3 поступает на вход второго порогового элемента 10. Если сигнал на выходе суммирующего усилителя 3 отличен от нуля, то на выходе второго порогового элемента 10 появляется сигнал, поступающий на вход элемента И 12. Если орган управления 6 неподвижен, то на выходе дифференцирующего элемента 8, а следовательно, и порогового элемента 7, где входной сигнал сравнивается с нулем, сигнал, не появляется, но он появляется на выходе элемента НЕ }I и, следовательно, на втором входе элемента И 12. При наличии управляющего сигнала на выходе суммирующего усилителя 3 и отсутствии движения органа управления 6 на оба входа элемента И 12 поступят сигналы, и сигнал с его выхода поступит на коммутирующий элемент 13, который подключит индикатор отказа 14. Использование изобретения позволит контролировать соу-тояние органов управления с больщей надежностью. Формула изобретения Устройство для контроля исправности органа управления, содержащее пороговые элементы, датчик сигнала управления, выход которого через первый формирователь сигнала подключен к первому входу суммирующего усилителя, второй вход которого соединен с датчиком обратной связи, выход суммирующего усилителя подключен ко входу привода, который механически соединен с датчиком обратной связи и органом управления, коммутирующий элемент, к выходу которого подключен индикатор отказа, отличающееся тем, что, с целью повышения надежности устройства, оно содержит дифференцирующий элемент, элемент НЕ, второй формирователь сигнала и элемент И, к первому входу которого через последовательно соединенные элемент НЕ, пороговый элемент, второй формирователь сигнала и дифференцирующий .элемент подключен второй вход суммирующегоусилителя,, выход которого через второй пороговый элемент соединен со вторым входом элемента И, выход которого подключен ко входу коммутирующего элемента. , Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР № 403602, кл. В 63 В 1/28, 27.07.70. 2.Патент США № 3812806, кл. 114-66.5 Н, 16.08.72. 3.Патент США № 3739738, кл. 114-144 R, 16.10.70.
а
f4
12
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля исправностиОРгАНА упРАВлЕНия | 1979 |
|
SU838666A2 |
| Устройство для контроля исправности органа управления | 1983 |
|
SU1173394A2 |
| Устройство контроля | 1984 |
|
SU1229731A1 |
| Устройство для контроля исправности объекта | 1981 |
|
SU987581A1 |
| Система управления регулирующим органом | 1981 |
|
SU1004963A1 |
| Система автоматического управления скоростью вращения ротора турбины | 1980 |
|
SU866247A2 |
| Устройство для измерения механических параметров коммутирующих элементов | 1984 |
|
SU1215094A1 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
| Аналого-цифровой интегратор | 1979 |
|
SU813456A2 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |