(54) МИКРОМАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМАНИПУЛЯТОР | 1970 |
|
SU260077A1 |
| Микроманипулятор для введения микроэлектрода в нервные клетки | 1972 |
|
SU442790A1 |
| ОТРАЖАТЕЛЬНЫЙ УГЛОМЕРНЫЙ ИНСТРУМЕНТ | 2001 |
|
RU2190188C1 |
| Способ заточки стеклянных микропипеток и устройство для его осуществления | 1985 |
|
SU1315248A1 |
| Устройство для заточки зубьев инструмента | 1981 |
|
SU975347A1 |
| Устройство для отделочно-упрочняющей обработки винтовых поверхностей | 1990 |
|
SU1750934A1 |
| Установка для разрезания бластоцистов | 1989 |
|
SU1804807A1 |
| МЕХАНИЗМ РАСКРЫТИЯ И ЗАКРЫВАНИЯ ФОРМ ДЛЯ СЕКЦИОННОЙ МАШИНЫ (ВАРИАНТЫ), СЕКЦИОННАЯ МАШИНА (ВАРИАНТЫ) | 1998 |
|
RU2187468C2 |
| ШПРИЦ-РУЧКА ДЛЯ БОЛЬШИХ ДОЗ | 1992 |
|
RU2091087C1 |
| Микроманипулятор | 1981 |
|
SU959753A1 |
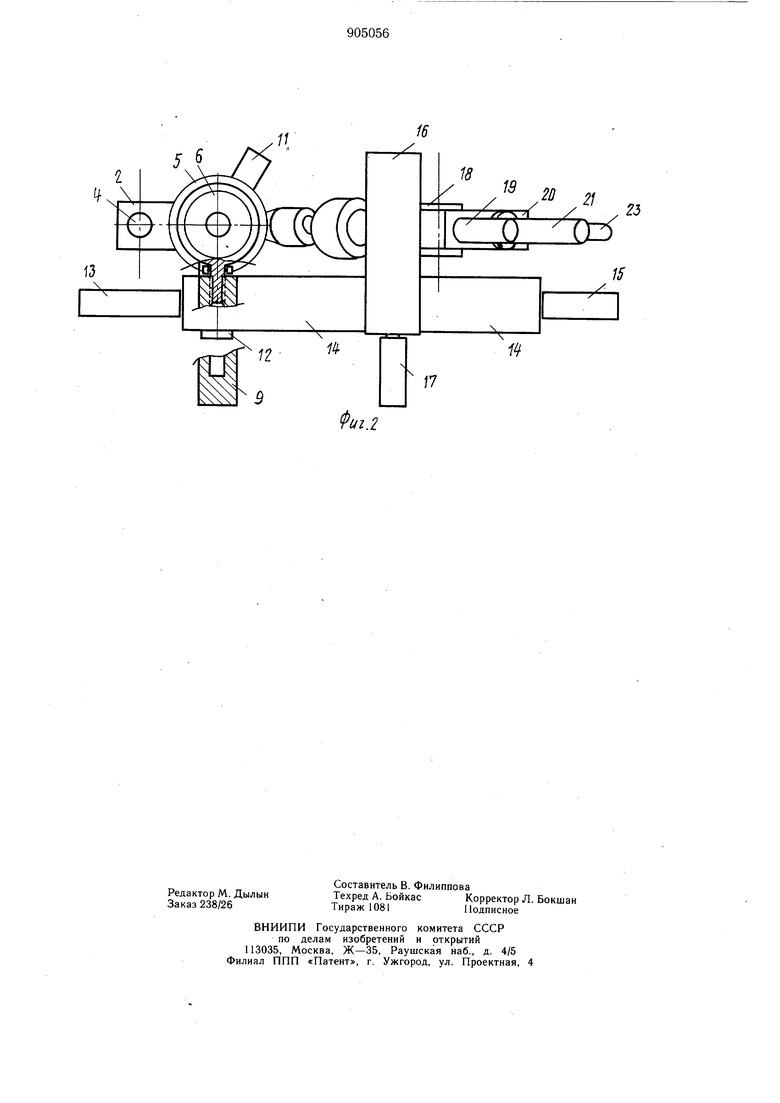
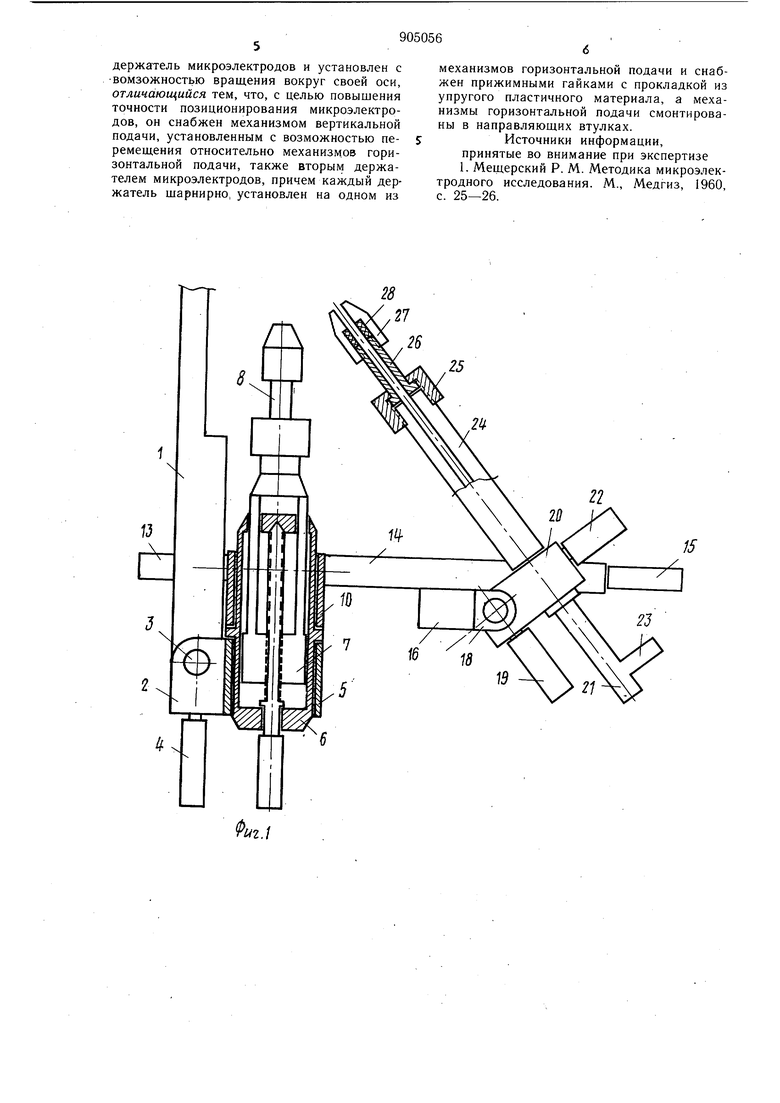
Изобретение относится к манипуляторостроению и применяется в биологической и медицинской промышленности. Известен микроманипулятор, содержащий основание, микроэлектроды и механизмы горизонтальной подачи 1. Недостатком известного устройства является низкая точность позиционирования микроэлектродов. Цель изобретения - повышение точности позиционирования микроэлектродов. Цель достигается тем, что микроманипулятор снабжен механизмом вертикальной подачи, установленным с возможностью перемещения относительно механизмов горизонтальной подачи, а также вторым держателем микроэлектродов, причем каждый держатель шарнирно установлен на одном из механизмов горизонтальной подачи и снаб жен прижимными гайками с прокладкой из упругого пластичного материала, а механизмы горизонтальной подачи смонтированы в направляющих втулках. На фиг. 1 изображено предлагаемое устройство, вид сверху; на фиг. 2 - то же, вид сбоку. К основанию 1 микроманипулятора, жестко укрепленного на предметном столике микроскопа с помощью щарнирного механизма 2 с одной цапфой 3 и снабженного стопорной винтовой ручкой 4, крепится узел второй горизонтальной подачи и поворота вокруг ее оси, который состоит из направляющей втулки 5, винтового механизма на ходовом винте 6, вращением которого вызывают продольные перемещения детали с гаечной резьбой 7, к которой неподвижно крепится держатель 8. Винтовой механизм 6 снабжен ручкой 9 поворота и крепления. Соосно с направляющей втулкой 5 укреплена втулка поворота 10 со стопорной ручкой 11. К втулке поворота 10 с помощью щарнирного соединения на винте 12 со стопорной ручкой 13 прикреплен винтовой механизм первой горизонтальной подачи 14 на ходовом винте. Вращением ручки 15 ходового винта вызывают перемещение детали с гаечной резьбой в горизонтальной плоскости. К перемещаемой детали неподвижно прикреплен винтовой механизм вертикальной подачи 16. Вращением ручки 17 ходового винта этого механизма 16 перемещают деталь с гаечной резьбой в вертикальной плоскости, перемещаемая деталь 18 имеет шарнирный механизм с одной цапфой и стопорной ручкой 19. Через шарнирный механизм к перемещаемой детали 18 укреплена поворотная втулка 20, в которой с возможностью вращения вокруг своей оси укреплен . шток 21, фиксируемый стопорной ручкой 22. Для поворота штока 21 вокруг своей оси перпендикулярно к не.му заклепана ручка 23, на противоположном концештока 21 запрессована втулка 24 держателя 8 микроэлектродов. Держатель 8 выполнен из оргстекла и состоит из муфты 25, втулок 24 и 26 и прижимной гайки 27, внутри которой располагают уплотнительную прокладку 28, изготовленную из упругого пластичного материала, например резины. Втулка 24 жестко укреплена на микроманипуляторе и имеет наружную резьбу для жесткого разъемного крепления с втулочной муфтой 25, которая с одного конца имеет внутреннюю резьбу, а с другого - внутренний фланец. Втулка 26 с одного конца имеет наружный фланец для жесткого разъемного соединения с втулкой 24 при навинчивании втулочной муфты 25, а с другого - наружную резьбу, на которую навинчивают прижимную гайку 27. Все детали держателя 8 имеют внутренний канал для микроэлектрода. Предлагаемое устройство работает следуюшим образом. При изготовлении блока микроэлектродов в держателе 8 горизонтальной подачи 6 закрепляют центральный прямой микроэлектрод, а в держателе 8, укрепленном на штоке 21, закрепляют боковой изогнутый в толстой части микроэлектрод. С помощью шарниров 2, 12 и 18, горизонтальных подач 6 и 14 тонкие концы микроэлектродов вводят в зрительное поле микроскопа и фиксируют в нем стопорными .ручками 4, 13 и 19. Направление оси тонкой части бокового микроэлектрода устанавливают поворотом штока 21 и фиксируют стопорной ручкой 22. Сведение микроэлектродов в горизонтальной плоскости осуществляют с помошью подачи 14. Для сведения микроэлектродов в вертикальной плоскости микроманипулятор поворачивают вокруг продольной оси центрального микроэлектрода, для чего отпускают ручку 9 поворота и крепления, поворачивают устройство в направляющей втулке 5 и фиксируют в новом положении ручкой 9. Сближение микроэлектродов на нужное расстояние осуществляют вертикальной подачей 16. Расстояние между рабочими концами микроэлектродов устанавливают перемещением центрального микроэлектрода горизонтальной подачей 6. Все расстояния контролируют с помощью микроскопа с точностью менее 1 мкм. После установления нужной взаимной ориентации микроэлектродов отпускают стопорную винтовую ручку 4 и поворачивают микроманипулятор вокруг оси шарнирного механизма 2, выводя микроэлектроды за пределы предметного столика микроскопа. При этом взаимное расположение микроэлектродов не нарушают. Микроэлектроды склеивают между собой. Полностью отвинтив втулочные муфты 25 держателей 8, готовый блок отсоединяют от микроманипулятора. То, что втулки 24 и 26 держателей 8 не имеют взаимного вхождег ния позволяет отсоединять блок от устройства без поломки. Ослабив прижимные гайки 27, держатели 8 отсоединяют от готового блока. При изготовлении блока, состоящего более чем из двух микроэлектродов, сначала изготавливают блок, состоящий из двух микроэлектродов, но от микроманипулятора отсоединяют только боковой электрод блока. Отпустив стопорную ручку 11, микроманипулятор поворачивают относительно горизонтальной подачи 6, вращая его во втулке 10, после чего фиксируют в новом положении ручкой .11. Ослабив прижимную гайку 27, отсоединяют от бокового микроэлектрода блока держатель 8, который вновь соединяют с устройством. В держателе 8, укрепленном на щтоке 21, закрепляют следующий боковой изогнутый микроэлектрод и повторяют описанную процедуру. Предложенный микроманипулятор позволяет с высокой степенью точности, быстро и с высокой производительностью изготавливать блоки микроэлектродов, которые в свою очередь впервые позволяют одновременно регистрировать как внутри, так и внеклеточные потенциалы с возможностью одновременного электрического и химического воздействия на исследуемую группу клеток или на отдельную клетку. Так, например, изготовление блока из двух микроэлектродов с помощью известных устройств занимает 20-30 мин, а изготовление с помощью предлагаемого устройства занимает 3-5 мин. Изготовление блока из трех и более микроэлектродов с заданной степенью точности в трех плоскостях с помощью известных устройств практически невозможно, при использов,ании предлагаемого устройства точность сведения и соединения микроэлектродов в блок не зависит от количества микроэлектродов и определяется лищь разрещающей способностью использующего ся микроскопа и может быть 1 мкм и менее в любой плоскости. Изготовление блока, состоящего более чем из двух микроэлектродов, при использовании микроманипулятора занимает 3-5 мин на подклейку каждого следующего бокового микроэлектрода. Формула изобретения . Микроманипулятор, содержащий осно вание, микроэлектроды и механизмы горизонтальной подачи, один из которых имеет
держатель микроэлектродов и установлен с вомзожностью вращения вокруг своей оси, отличающийся тем, что, с целью повышения точности позиционирования микpoэлeктpOJ дов, он снабжен механизмом вертикальной подачи, установленным с возможностью перемещения относительно механизмов горизонтальной подачи, также вторым держателем микроэлектродов, причем каждый держатель щарнирно, установлен на одном из
механизмов горизонтальной подачи и снабжен прижимными гайками с прокладкой из упругого пластичного материала, а механизмы горизонтальной подачи смонтированы в направляющих втулках.
Источники информации, принятые во внимание при экспертизе 1. Мещерский Р. М. Методика микроэлектродного исследования. М., Медгиз, I960, с. 25-26.
