чены на соответствующие входы блока защит и реверса.
На чертеже изображена блок-схема описываемого устройства.
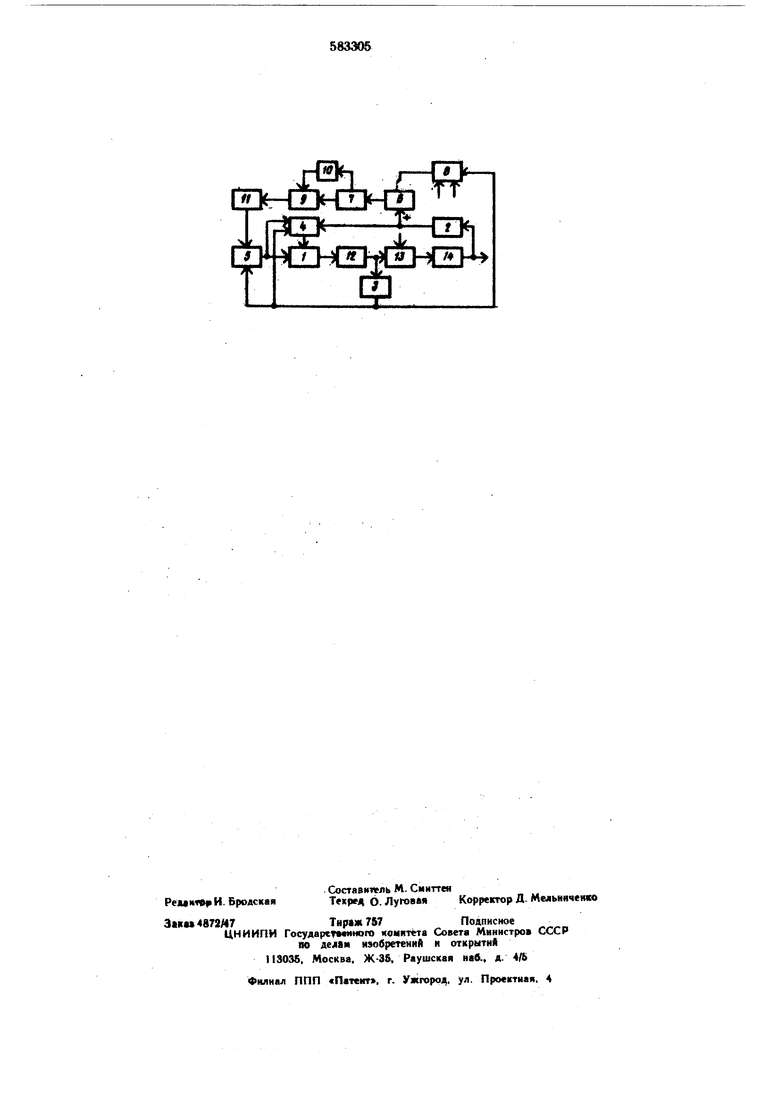
Устройство состоит из регулятора I скорости подачи, датчиков 2, 3 нагрузки (тока) и скорости подачи соответственно, блока 4 защит и реверса машины, элемента 5 сравнения, схемы 6 вычитания, блока 7 вычисления а солютной величины, линейного функционального преобразователя 8, эстремального регулятора 9 г двумя входами, генератора 10 тактовых имлульсов и задаю1йего блока П. Погрузочная машина состоит на ходовой части с регулируемым приводом 12, исполнительного органа 13 и его привода 14.
Устройство работает следующим образом. Сигнал датчика 3 скорости подачи подается на элемент 5 сравнения, линейный функциональный преобразователь 8. Со схемы 6 вычитания снимается разностный сигнал, сформированный датчилом нагрузки (тока) 2 и линейным функциональным преобразователем 8. Эта раз; ность в блоке 7 вычисления абсолютной величины берется по абсолютной величине и подается на первый вход экстремального регулятора 9. В зависимости от скорости подачи машины на щтабель следует, что датчик 2 нагрузки выдает монотонно возрастающий сигнал, а линейный функциональный преобразователь 8-монотонно убывающий сигнал. На первый вход экстремального регулятора 9 поступает значение функции, имеющей явно выраженный экстремум по скорости подачи машины на штабель, причем экстремум соответствует точке пересечения монотомно-возрастающей и убывающей функций. Экстремальный регулятор 9 отыскивает эту точку минимума. Переменный шаг движения экстремального регулятора 9 задаетЬя по второму входу генератором 10 тактовых импульсов и его величина зависит от крутизны экстремальной функции. Точке минимума экстремальной функции соответствует оптимальная величина скорости подачи мащины на штабель. Задающий блок П вырабатывает задающее воздействие регулятора I скорости подачи, поступающее на элемент 5 сравнения. Регулируемый привод 12 ходовой части отрабатывает оптимальное значение скорости подачи исполнительного органа 13 погрузочной машины на штабель.
При измененки свойств штабеля и погружаемого материала сигнал с датчика нагрузки (тока) 2 изменится. В этих случаях контур оптимизации определит новое оптимальное значение скорости подачи, которое отработает регулятор 1. Таким образом, непрерывно происходят процессы перестройки режима работы погрузочной машины в соответствии с определенным аппаратурно оптимальным задающим воздействием, которое учитывает реальные нагрузки на приводе 14 исполнительного органа.
Блок защит и реверса 4 обеспечивает кратковременный останов прнвода 12 ходовой части в режиме заштыбовки исполнительного органа 13 (нагрузка на приводе 14 предельно допустимая, а скорость подачи близка к нулю) и его реверс, если процесс саморасштыбовки не произойдет.
Формула изобретения
. Устройство автоматического регулирования режима работы погрузочной машины бокового захвата с парными нагребными лапами, содержащее датчик нагрузки, задающий блокэлемент сравнения, регулятор скорости подачи блок защит и реверса, выход которого подключен к регулятору скорости подачи, ходовую часть с Jpeгyлиpyeмым приводом, исполнительный орган погрузочной машины и его привод, отлинающееся тем, что, с целью снижения динамических нагрузок на привод исполнительного органа, оно снабжено экстремальным регулятором, датчиком скорости подачи, линейным функциональным преобразователем, блоком вычисления абсолютной величины, генератором тактовых импульсов и схемой вычитания, суммирующий вход которой подключен к выходу датчика нагрузки, вычитающий вход через линейный функциональный преобразователь подключен к выходу датчика скорости подачи, а выход схемы вычитания через блок вычисления абсолютной величины соединен с первым входом экстремального регулятора и входом генератора тактовых импульсов, соединенного с вторым входом экстремального регулятора, подключенного через задающий блок к одному входу элемента сравнения, к другому входу которого подключен выход датчика сксфости подачи, причем выход элемента сравнения соединен с регулятором скорости подачи.
2. Устройство по п. 1, отличающееся тем, что выходы датчика нагрузки, элемента сравнения и датчнкй скорости подаод подключены на соответствующие входы блока Защит и реверса.
Источники информации, принятые во внима мне при экспертизе:
1.Авторское свидетельство № 231487, кЛ. Е 21 С 33/00, 1963.
2.Водяник Г. М. и др. Погрузочная машина бокового захвата с регулируемым режимом работы, «Известия Северо-Кавказского научного центра Высшей школы (серия технических иаук), Ростовский университет, Ростов-на-Дону, 1973, ь,1, с. 28-31.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управлениягОРНОй МАшиНОй | 1978 |
|
SU810963A1 |
| Устройство автоматического управления горной погрузочной машиной с нагребными лапами | 1978 |
|
SU875028A1 |
| Устройство дискретного управления режимом работы погрузочной машины с нагребными лапами | 1982 |
|
SU1068596A1 |
| Барабанно-лопастная погрузочная машина | 1981 |
|
SU1041705A1 |
| Способ автоматического управления режимом работы погрузочной машины с барабанно-лопастным исполнительным органом | 1979 |
|
SU866236A1 |
| Устройство сигнализации о режимахРАбОТы гОРНОй пОгРузОчНый МАшиНы | 1979 |
|
SU840350A1 |
| Устройство автоматического управления режимом работы погрузочной машины с нагребными лапами | 1976 |
|
SU654799A1 |
| Устройство для управления механизмом подачи погрузочной машины непрерывного действия | 1981 |
|
SU1036861A2 |
| Экстремальный регулятор режима обработки на металлорежущих станках | 1980 |
|
SU1015338A1 |
| Устройство для управления механизмом подачи погрузочной машины непрерывного действия | 1980 |
|
SU956710A1 |