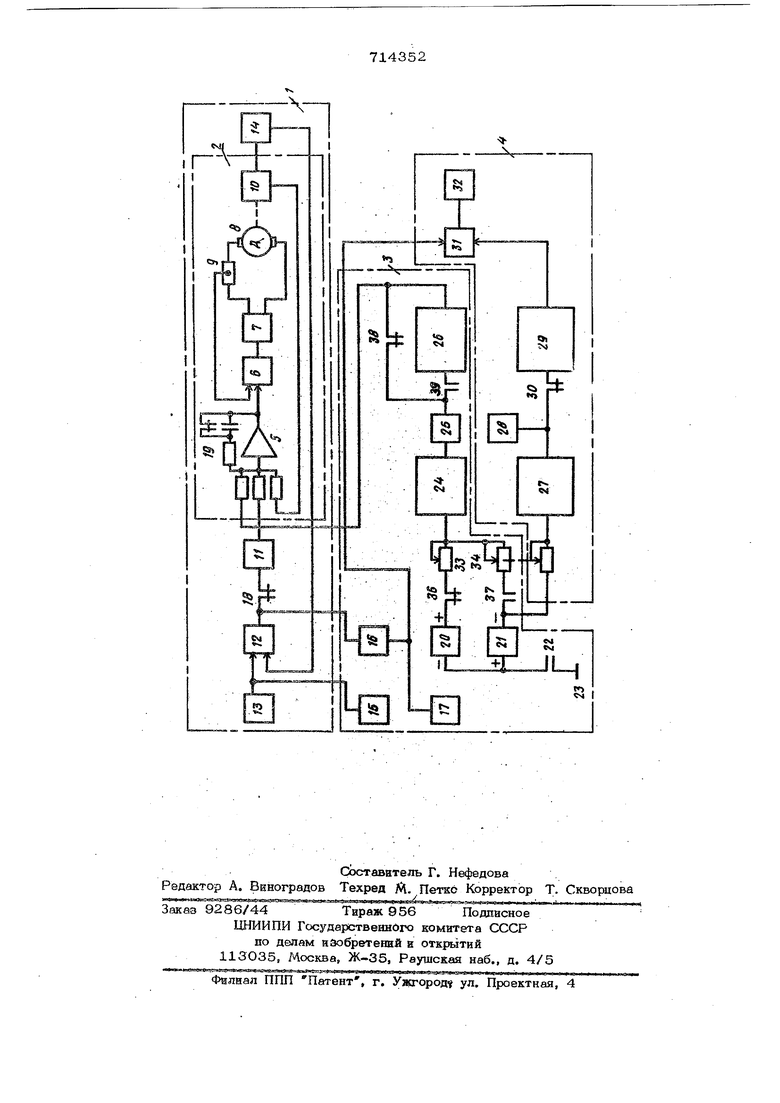
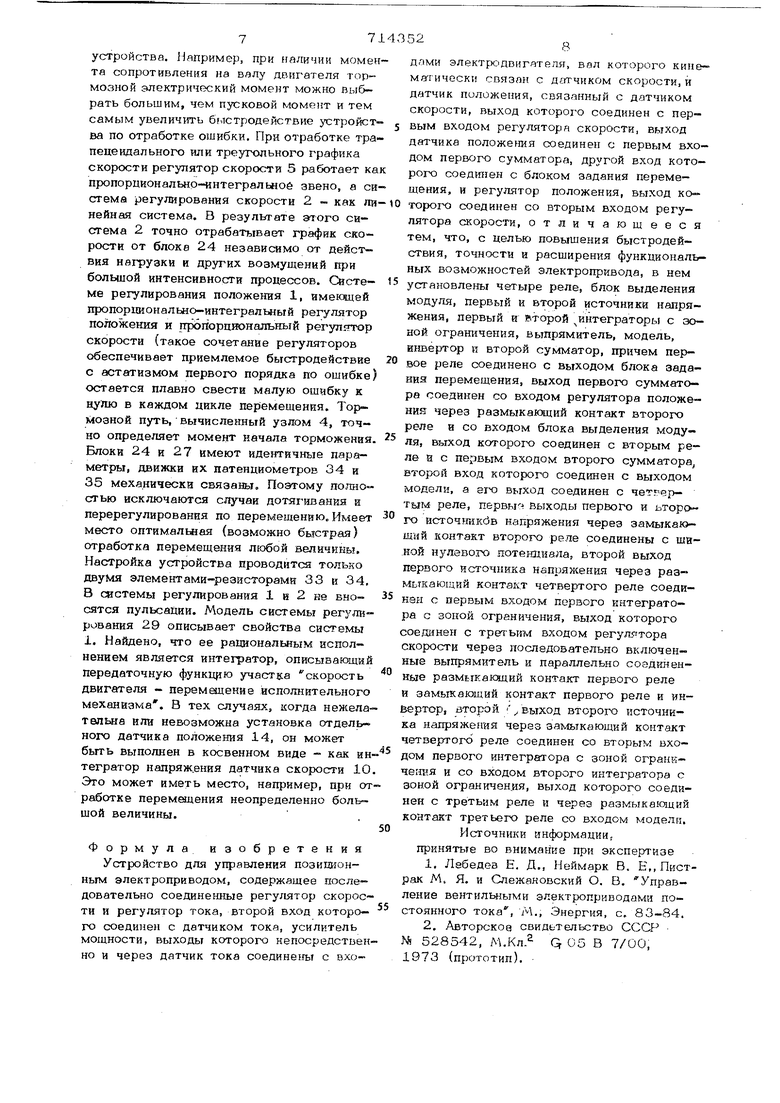
Изобретение относится к области автомвтизацик и может быть использовано, в электроприводе с автомвтичерким регулированием положения, например, в нажим ных устройствах прокатных станов и следящих системах. Известна система с регулятором положения, в которой для оптимизации процесса отработки перемещения регулятор положения имеет линейнр параболическую характеристику LiJОднако такая характеристика, кроме того, что она осуществляется приближенно, не обеспечивает должного качества процесса (быстродействия и точности) при действии возмущений и при изменении темпа, отработки перемещения. Быстродействие в так.ой системе недостаточно изза вращения дополнительного контура регулирования положения. По технической сущности наиболее близким к предложенному является устрой СТБО, содержащее последовательно соединенные регулятор скорости и регулятор тока, второй вход которого соединен с датчиком тока, усилитель мсяцности, выходы которого непосредственно и через датчик тока соединены с входами электродвигателя, вал которого кинематически связан с датчиком скорости, и датчик положения, связанный с датчиком скорости, выход которого соединен с первым входом регулятора скорости, выход датчика положения соединен с первым входом первого сумматора, другой вход которого соединен с блоком задания перемещения, и регулятор положения, выход которого соединен со вторым входом регулятора скорости. Быстродействие устройства увеличено за счет того, что при больщой ощибке по положению электропривод работает как система регулирования скорости, которая менее инерционна, чем система регулирования положения. Отработка же малой ошибки происходит в системе регулирования положения. Для своевременного перевода электропривода в режим торможения заблаговременно вычисляется будущий тор мознон путь путем деления кппдрата скорости двигателя на тормозной момент j-l это устройство имеет сложную конструкцию. В нем использованы, помимо датчиков тока, скорости и положения, датчи ки статического момента двигателя и датчик малых рассогласований. Для вычислени тормозного пути использованы блок умнож ния и блок деления, имеющие в практическом исполнении ограниченную точность. Невысока точность и датчика статического момента, работающего по косвенному принципу. Не учитывается также инерционность системы регулирования скорости. Управление отработкой перемещения про- водится в функции задания момента двига теля, который одинаков при пуске и торможении двигателя. Между тем, можно увеличить тормозной момент двигателя и сократить время отработки ошибки. Дан- ное обстогтельство свидетельствует о недостаточном использовании функдиональных возможностей устройства. Цель изобретения - повышение быстродействия, точности и расширение функдио- нальных возможностей электропривода. Это достигается тем, что в .устройстве дополнительно установлены четыре ре ле, блок выделения модуля, первый и второй источники напряжения, первый и второй интеграторы с зоной ограничения, выпрямитель, модель, инвертор и второй сум матор, причем первое реле соединено с выходом блока задания перемещения. Выход первого сумматора соединен со вхо- дом регулятора положения через размыкающий контакт второго реле в со входом блока выделения модуля, выход которого соединен со вторым реле в с первым входом второго сумматора, второй вход кото рого соединен с выходом модели, а его выход соединен с четвертым реле. Первые выходы первого и второго источников напряжения через замыкакяций контаи второго реле соединены с шиной нулевого потенциала. Второй выход первого источника напряжения через размыкающий контакт четвертого реле соединен с первым входом первого интегратора с зоной ограничения, выход которого соединен с третьим входом регулятора скорости через последовательно включенные выпрямитель и параллельно соединенные размыкающий контакт первого реле и замыкакяций контакт первого реле и инвертор. Второй выход-второго источника напряжения через замыкающий контакт четвертого реле сое динен со вторым входом первого интегра- т()рп с зоной ограничения и со входом второго интегратора с зоной ограничения, выход ксугорого соединен с третьим реле и через размыкакяций контакт третьего реле со входом модели. Функциональная схема устройства приведена на чертеже. Устройство состоит из системы регулирования положения 1, в которую входит система регулирования скорости 2, узла задания скорости 3 и уэла вычисления тормозного пути 4. Система регулирования скорости 2 состоит из регулятора скорости 5, регулятора тока б, усилителя мощности 7, электродвигателя постоянного тока 8, датчика тока 9 и кинематически связанного с валом двигателя датчика скорости 10. Система регулирования 1 положения содержит систему регулирования скорости 2, рег улятор положения 11, первый сумматор 12, блок задания перемещещсния 13 и датчик положения 14. Датчик 14 может быть датчиком прямого или косвенного действия. Если используется датчик прямого действия, например, сельсин, то он кинематически связан с валом двигателя 8. Под датчиком косвенноххэ действия имеется в виду интегратор, вход которого электрически соединен с выходом датчика скорости 10. Узел задания 3 скорости цпя системы регулирования 2 состоит кя- первого реле 15, блока выделения модуля 16 и второго реле 17. Выход пер-;вого сумматора 12 связан с регулятором положения 11 через размыкающий контакт 18 реле 17. Цепь обратной связи регулятора скорости 5 содержит резистор и конденсатор, который шунтирован размыкающим контактом 19 реле 17. Кроме того, в состав узла задания скорости 3 входят источники напряжения 20 и 21, первые выходы которых соединены через замыкающий контакт 22 реле 17 с шиной нулевого потенциала 23, первый интегратор с зоной ограничения 24, выпрямитель 25 и инвертор 26. Узел вычисления тормозного пути 4 состоит из второго интегратора с зоной ограничения 27, третьего реле 28, модели 29 системы регулирования положения 1, которая через размыкающий контакт 30 реле 28 соединена с блоком 27 и через сумматор 31 с четвертым реле 32. Интеграторы с зоной ограничения 24 и 27 имеют входные регулируемые резисторы 33, 34 и 35. Источник напря-. жения 20 связан через контакт 36 реле 32 с,резистором 33. Источник напряжения 21 связан через контакт 37 реле 32 с резистором 34 и непосредственно с резистором 35. ГЗ узле задания скорости 3 выход блока 24 чере-э выпрямитель 25 и параллельно соединенные контакт 38 реле 15 и контакт 39 реле 15 и инвертор 26, связан с третьим входом регуля тора скорости 3, Устройство работает следующим образом. При наличии сигнала от блока задания перемещения 13 возможны режимы работ при большой и малой ошибке. При отработке большой ошибки, реле 17 срабатывает, так как оно получает большой сигнал от блока выделения моду пя 16. Реле 17, срабатьшая, своим контактом 18 выводит из работы регулятор положения 11. В этом режиме ошибка по положению отрабатывается системой регу лировакия скорости 2, в которой на тре- тий вход регулятора скорости 5 поступает задакхций сигнал по скорости от первого интегратора с зоной ограничения 24. Сигнал на выходе блока 24 формируется так, Контакт 22 реле 17 замыкается и от HCTO4HiiK.a напряжения 20 через замкнутый контакт 36 поступает напряжение положительной полярности ступенчатой на резистор ЗЗ. При этом выходное напряжение блока 24 увеличивается по линей ному закону. Оно подается через выпрямител 25 и контакт 38 на третий вход регулятора скорости 5. Регулятор 5 работает как пропорционально-интегральное звено, поскольку контакт 19 реле 17 разомкнут Происходит пуск двигателя 8 и нач.ина.ет- ся отработка ошибки по положению. Одновременно с пуском двигателя в узле вычисления тормозного пути 4 моделируется сигнал, пропорциональный тормозному пути в будущем. Напряжение от источника напряжения 21 поступает через резистор 35 на вход второго интегратора с зо ной ограничения 27, на выходе которого напряжение изменяется по линейному закону. Это напряжение, пройдя через модель 29, пропорциональко .тому тормозному пути, который будет отрабатываться двигателем 8 в будущем. Далее напряжение блока 24 достигает насыщения, и ошибка отрабатывается системой регулирования 2 при постоянной скорости двига- теля 3. Когда в узел 4 напряжение блока 27 достигает наибольшего значения, равного величине насыоцеиия, срабатывает ре ле 28, которое своим контактом 30 отключает выход блока 27 от входа модели 29. После этого Выходное напряжение мо дели 29 остается неизменным, оно представляет наибольшой тормозной путь двигатеяя 8. В сумматоре 31 сравнивается модуля фактической ошибки по положению с выхода блока 16с сигналом тормозного пути модели 29. Когда эти сигналы сравниваются, сработает реле 32, которое размыкает свой контакт 36 и замыкает контакт 37. На вход блока 24через резистор 34 поступает отрицательное напряжение от источника 21. Выходное напряжение блока 24 уменьшается по линейному закону, а двигатель 8 переходит в режим торможения. Выпрямитель 25обеспечивает однополярность напряжения от блока 24. Таким образом, от блока 24 подается на систему регулирования 2 напряжение трапецеидальной формы (при ошибке - треугольной формы). Так как регулятор скорости 5 в этом режиме является звеном пропорциональноинтегрального действия, то система 2 точно отрабатьтвает задание по скорости от enoka 24 независимо от изменения нагруаки на валу двигателя 8. При треугольном графике скорости процесс протекает аналогично. В конце торможения напряжения от блока 24 спадает до нуля и ошибка умень- аятся настолько, чтсреле 17 от1и1ючается и контактом 2,2 выводит узел 3 из работы и вводит в действие конту) положения: замыкая свой контакт 18, подключает регулятор положения 11 к выходу сумматора 12, контакт 19 этого реле замыкается, и регулятор скорости 5 превращается в пропорш ональное звено. Ошибка регулирования плавно спадает до нуля, система регулирования 1 имеет астатизм по ошибке. На этом цикл позициойирования заканчивается. На выходах блоков 24 и 27 формируется однополярное напряжение. Для изменения полярности напряжения на третьем входе регулятора скорости 5 при изменении полярности сигналаот блока задания перемещения 13 служит репе 15; при изменении пол1фности реле 15 срабатывает н подаетНапряжение от блока 24 через выпрямитель 25, контакт 39 и инвертор 26 (передаточное отношение инвертора 26 равно минус единице). В устройстве осуществляется раздельная регулировка интенсивности процессов пуска и торможения двигателя 8 с помощью резисторов 33 и 34, которые осуществляют угол наклона напряжения блока 24 и тем самым величины пускового и тормозного моментов двигателя 8. Это рес-ширяет функциональные возможности устройства. Например, при наличии момен та сопротивления на валу двигателя тормозной электрический момент можно выбрать большим, чем пусковой момент и тем самым увеличить б.мстродействие устройст ва по отработке ошибки. При отработке трапецеидального или треугольного графика скорости регулятор скорости 5 работает ка пропорционально-интегральное звено, а си стема регулирования скорости 2 - как ли нейная система. В резулы-ате этого система 2 точно отрабатывает график скорости от блока 24 независимо от действия нагрузки и друтих возмущений при большой интенсивносгтн процессов. Светеме регулирования положения 1, имекяцей пропорционально-интегральный регулятор положения и пропорциональный регулятор скорости (такое сочетание регуляторов обеспечивает приемлемое быстродействие с «этатизмом первого порядка по ошибке) остается плавно свести малую ошибку к нулю Б каждом цикле перемещения. Тормозной путь, вычисленный узлом 4, точно определяет момент начала торможения. Блоки 24 и 27 имеют идентичные параметры, движки их патенциометров 34 и 35 механически связаны. Поэтому полностью исключаются случаи дотягивания и перерегулирования по перемещению. Имеет место оптимальная (возможно бь5страя) отработка перемещения любой величины. Настройка устройства проводится только двумя элементами-резисторами 33 и 34. В системы регулирования 1 и 2 не вно- сятся пульсации. Модель системы регулирования 29 описывает свойства системы 1. Найдено, что ее рациональным исполнением является интегратор, описывающий передаточную функцию участка скорость двигателя - перемещение исполнительного механизма. В тех случаях, когда нежела тельна или невозможна установка отдельного датчика положения 14, он может быть выполнен в косвенном виде - как ин тегратор напряж.ения датчика скорости 1О Это может иметь место, например, при от работке перемещения неопределенно большой величины. Формула изобретения Устройство для управления позиционным электроприводом, содержащее последовательно соединенные регулятор скорос ти и регулятор тока, второй вход которого соединен с датчиком тока, усилитель мощности, выходы которого непосредствен но и через датчик тока соедине11ы с входами электрюдвигателя, вал которого кипе- матическ связан с д;.1тчиком скорости, и датчик Положения, связанный с датчиком скорости, выход KOTopojo соединен с первым входом регулятора скорости, выход датчика положения соединен с первым входом первого сумматора, другой вход которого соединен с блоком задания перемещения, и регулятор положения, выход которого соединен со вторым входом регулятора скорости, отличающееся тем, что, с целью повышения быстродействия, точности и расширения функциональных возможностей электропривода, в нем установлены четыре реле, блок выделения модуля, первый и второй источники напряжения, первый и йторой интеграторы с зоной ограничения, выпрямитель, модель, инвертор и второй сумматор, причем первое репе соединено с выходом блока задания перемещения, выход первого сумматора соединен со входом регулятора положения через размыкакщий контакт второго реле и со входом блока выделения модуля, выход которого соединен с вторым реле а с первым входом второго сумматора, второй вход которого соединен с выходом модели, а его выход соединен с четг-ер- тмм реле, первый выходы первого и ьторо го источ}шкбв напряжения через замыкаюшай контакт второго реле соединены с ши.ной нулевого потенциала, второй выход первого источника нaRpяжeн ш через размыкающий контакт четвертого реле соедиН9Н с первым входом первого интегратора с зоной ограничения, выход которого соединен с третьим входом регулятора скорости через последовательно включенные выпрямитель и параллельно соединенные размыкающий контакт первого реле и замыкающий контакт первого реле и инвертор, второй выход BTOpoix) источника напряжения через замыкающий контакт четвертого реле соединен со вторым входом первого интегратора с зоной ограничения и со входом второго интегратора с зоной ограничения, выход которого соединен с третьим реле и через размыкаклций контакт третьего реле со входом модел. Источники информации, принятые во внимание при экспертизе 1.Лебедев Е. Д., Неймарк В. Е,,Пистрак М. Я. и Слежановский О. В. Управление вентильными электроприводами постоянного тока, М., Энергия, с. 83-84. 2.Авторское свидетельство СССР Jsh 528542, А-.Кл. Q 05 В 7/00, 1973 (прототип). 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости электродвигателя постоянного тока | 1976 |
|
SU655049A2 |
| Самонастраивающаяся система регулирования скорости | 1974 |
|
SU585475A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Устройство для автоматического регулирования натяжения полосы | 1977 |
|
SU692650A1 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |