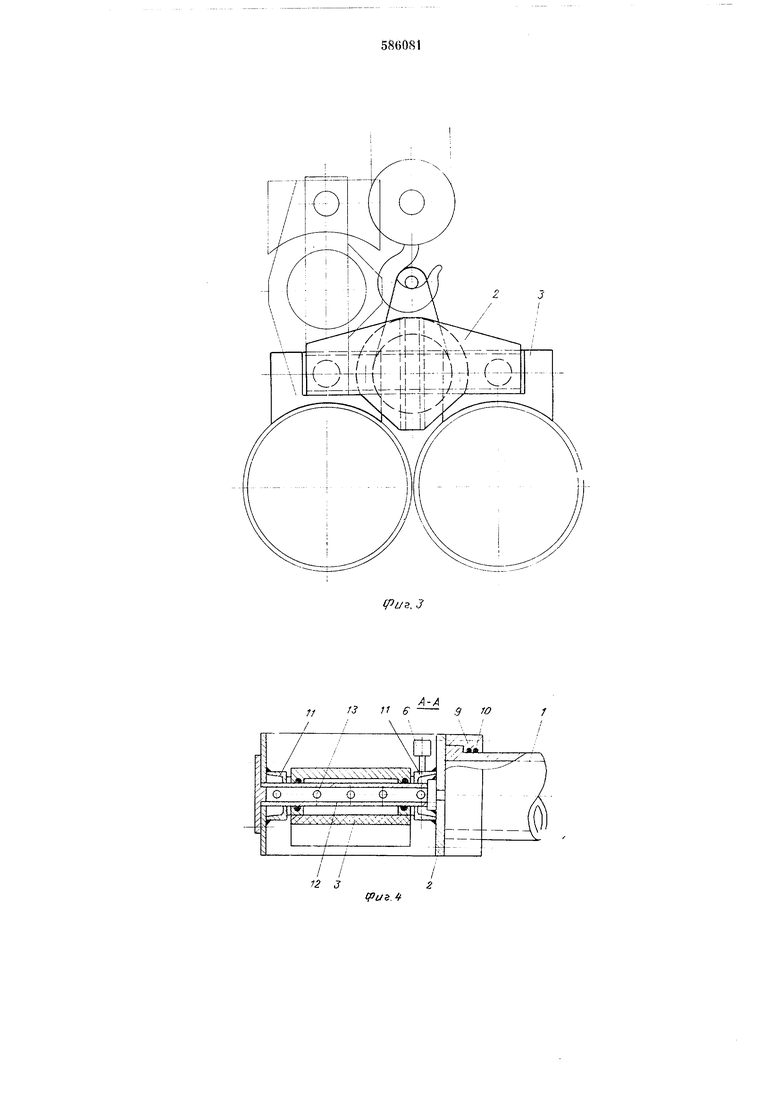
В средней частп внутреннего листа коромысла 2 нредусл отрено отверстие, прс- дназпаченное для поздушиого сообщения балкн-ресивера i с осями 12 и захватами 3.
Операции по захвату труб грузозахватным устройством происходят в следующем порядке.
Крановщик опускает устройство на поверхность подлежащих перемещению труб. После установки захватов 3 на поверхности труб включается насос 5, при помощи которого воздух отсасывается из камер вакуумных захватов. При достижении необходимого разрежения (вакуум контролируется по вак)умметру и световым или звуковым ириборам) крановщик поднимает устройство с двумя трубами и перемещает их краном к месту укладки в щтабель или в полувагон.
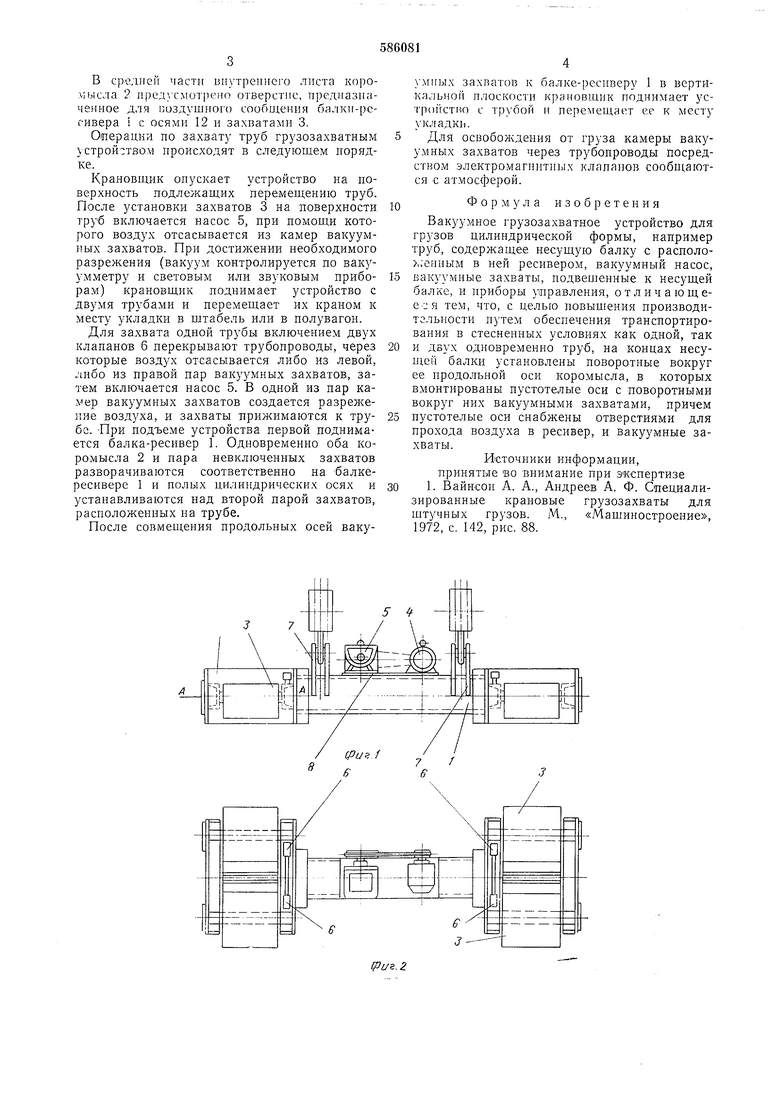
Для захвата одной трубы включением двух клапанов 6 перекрывают трубопроводы, через которые воздух отсасывается либо из левой, либо из правой пар вакуумных захватов, затем включается насос 5. В одной из пар камер вакуумных захватов создается разрежение воздуха, и захваты прижимаются к трубс. При подъеме устройства первой поднимается балка-ресивер 1. Одновременно оба коромысла 2 и пара невключенных захватов разворачиваются соответственно на балкересивере 1 и полых цилиндрических осях и устанавливаются над второй парой захватОВ, расположенных на трубе.
После совмещения продольных осей вакуумных захватов к балке-реснверу 1 в вертикальной плоскости крановщик поднимает устройство с трубой и перемещает ее к месту укладк11.
Для освобождения от груза камеры вакуумных захватов через трубопроводы посредством электромагнитных клапанов сообщаются с атмосферой.
Формула изобретения
Вакуумное грузозахватное устройство для грузов цилиндрической формы, например труб, содержащее несущую балку с располо.;еииым в ней ресивером, вакуумный насос, вакуумные захваты, подвещеиные к несущей балке, и приборы управления, отличающееся тем, что, с целью повышения производитгльности путем обеспечения транспортирования в стесненных условиях как одной, так и двух одновременно труб, на концах несуН1,ей балки установлены поворотные вокруг ее продольной оси коромысла, в которых вмонтированы пустотелые оси с поворотными вокруг них вакуумными захватами, причем пустотелые оси снабжены отверстиями для прохода воздуха в ресивер, и вакуумные захваты.
Источники информации, принятые ВО виимание при экспертизе
1. Вайнсон А. А., Андреев А. Ф. Специализированные крановые грузозахваты для штучных грузов. М., «Мащиностроение, 1972, с. 142, рис. 88.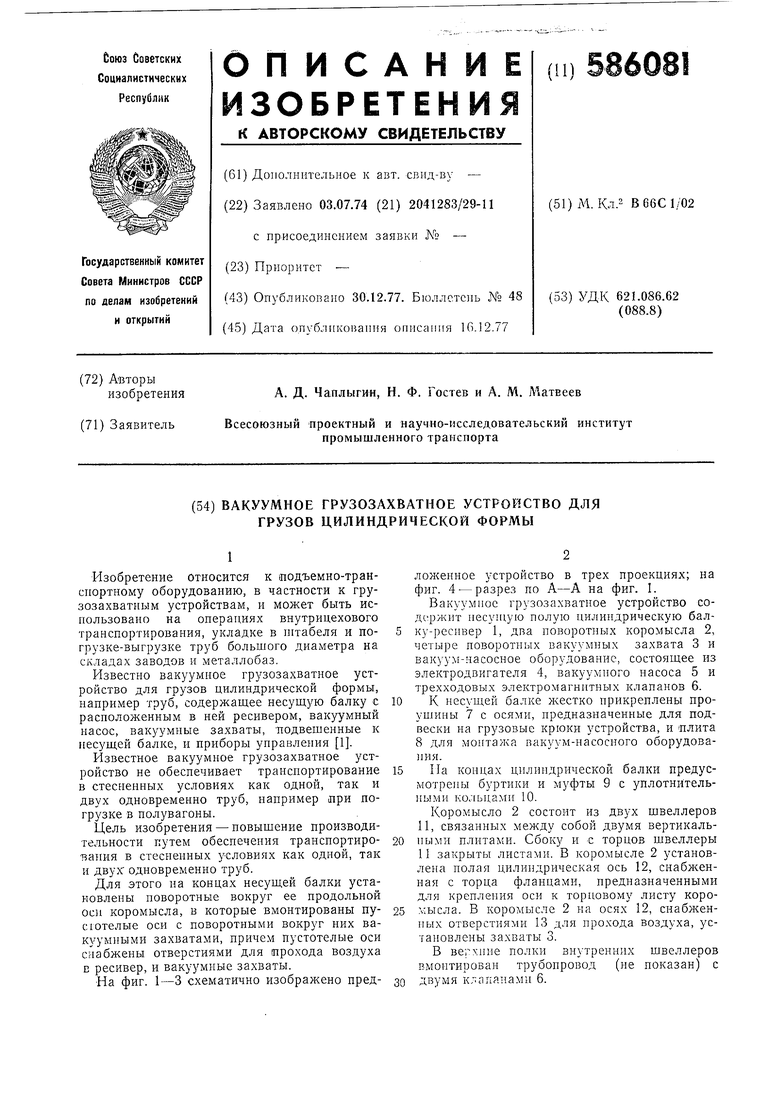
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1791321A1 |
| ГРУЗОЗАХВАТНОЬ УьГРОИСТВО | 1972 |
|
SU433030A1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 2005 |
|
RU2317243C9 |
| Грузозахватное устройство для труб | 1972 |
|
SU590235A1 |
| Грузозахватное устройство | 1977 |
|
SU695943A1 |
| Кран-манипулятор | 1985 |
|
SU1271817A1 |
| ВПТБ | 1973 |
|
SU397454A1 |
| КРАН | 2023 |
|
RU2812497C1 |
| Магнитное грузозахватное устройство | 1974 |
|
SU516606A1 |
| Вакумное грузозахватное устройство | 1985 |
|
SU1278287A1 |
ФМ....
titiiitMi.
/ / I ч .
vlllT
(риг.З
