Фиг, 2
Изобретение относится к области подъемно-транспортной техники, в частности к грузозахватным устройствам.
Известно грузозахватное устройство, содержащее траверсу с вакуумным оборудованием, шарнирно закрепленную на траверсе раму с вакуумными захватами, механизм поворота рамы относительно траверсы и противовес.
К недостаткам данного устройства следует отнести сложность и трудоёмкость монтажа листов (груза) на поворотную раму, т.к. стаскивание листов происходит в перпендикулярном направлении относительно оси рольганга.
Целью изобретения является улучшение эксплуатационных характеристик путем обеспечения работы с устройством в труднодоступных местах.
Для достижения указанной цели в грузозахватном устройстве, содержащем траверсу с вакуумным оборудованием, шарнирно закрепленную на траверсе раму с вакуумными захватами, механизм поворота рамы относительно траверсы и противовес, траверса выполнена с жестко закрепленными на ее концах щеками, ось шарнира поворота рамы расположена на щеках параллельно и ниже продольной оси траверсы и смещена относительно нее в сторону на расстояние, превышающее ширину траверсы, при этом противовес закреплен на боковой поверхности траверсы, противолежащей оси поворота рамы.
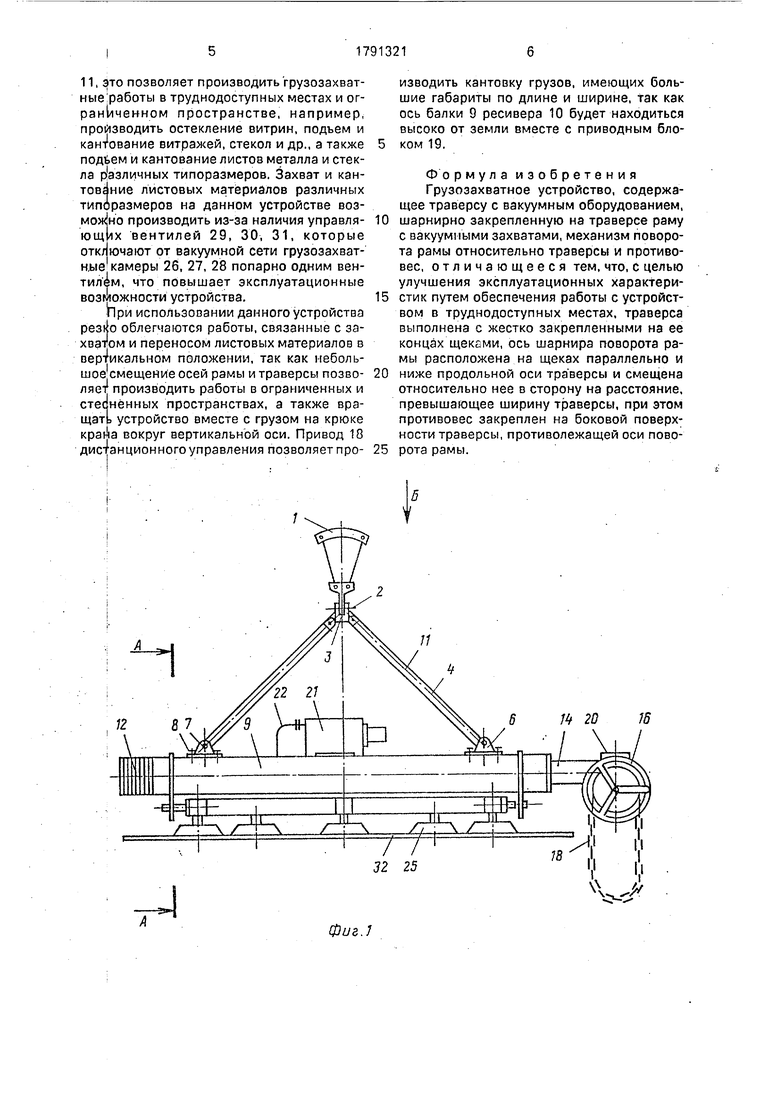
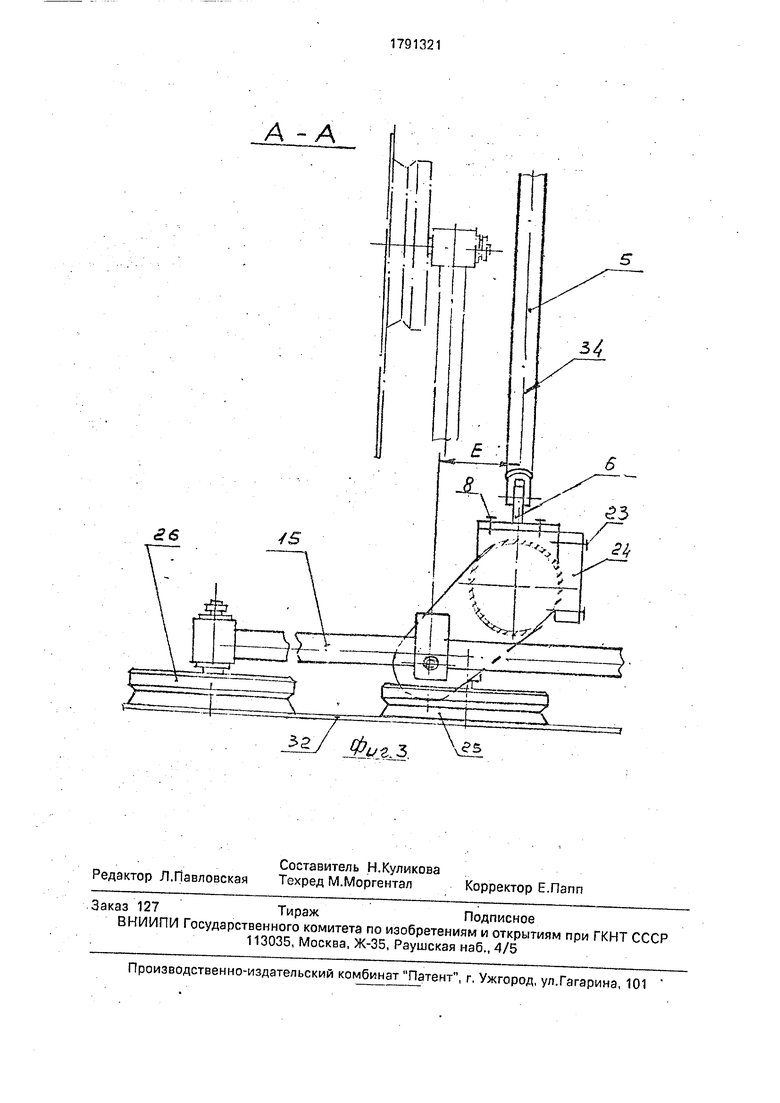
На фиг. 1 изображено вакуумное грузозахватное устройство; на фиг. 2 - вид Б на фиг. 1; на фиг, 3 - сечение А-А на фиг. 1.
В грузозахватном устройстве на шарнирной серьге 1 при помощи оси 2 закреплен фитинг 3, на котором шарнирно закреплены две трубчатых тяги 4,5, которые своими другими концами закрепляют шарнирно на кронштейнах 6 и 7. Кронштейны б и 7 болтами 8 крепят к балке 9 ресивера 10. Серьга 1, фитинг 2, трубчатые тяги 4 и 5, кронштейны б и 7, а также балка 9 ресивера 10 все вместе составляют подъемную траверсу 11. На одном из торцов балки 9 ресивера 10 закреплен противовес 12, состоящий из набора грузов 13, а на другом механизме 14 привода поворота рамы 15. Механизмом 14 привода поворота рамы 15 управляют маховиком 16с рукояткой 17, а при больших габаритах листовых материалов по вертикали при помощи дистанционного привода управления в виде цепи 18 на приводном блоке 19, выполненным заодно с маховиком 16. Механизм 14 привода поворота рамы 15 включает в себя червячный редуктор 20 и две зубчатые шестерни (не
показаны). На балке 9 ресивера 10 устанавливают вакуумное оборудование 21 с трубопроводом 22, соединенным с балкой 9 ресивера 10. В свою очередь вакуум-насосное оборудование 21 подсоединяют к пульту управления (не показан).
На боковой стороне балки 9 ресивера 10 болтами 23 крепят противовес 24, уравновешивающий вес рамы 15 с вакуумными гру0 зозахватными камерами 25, 26, 27, 28 управляющих вентилей 29, 30, 31 и груза (листовой материал) 32. Ось 33 поворота рамы 15 смещена относительно оси 34 траверсы 11 на расстояние Е, обусловленное
5 габаритами по ширине вакуум-насосного оборудования 21. Вращение рамы 15 вокруг осей, установленных в жестко закрепленных на балке 9 щеках производят вращение маховика 16. Полость балки 9, полости рамы
0 15 и полости камер (ВЗК) 25, 26, 27, вакуум- насосный агрегат 21, пульт управления (не показан) соединены между собой при помощи гибких шлангов (не показаны).
На лист 32 максимального габарита
5 (стекло, металл) опускают вакуумное грузозахватное устройство до полного контакта вакуумных грузозахватных камер 25, 26, 27. 28 с поверхностью листа 27 в горизонтальном или вертикальном положении, Включе0 нием вакуум-насосного оборудования 21 создают разрежение в полостях камер 23, 26,27,28 и производят захват листа 32 (груз) за счет присоса камер 25, 26,27. 28 к поверхности листа 32. По достижении необходи5 мой степени разрежения в камерах 25, 26, 27, 28 на пульте управления (не показан) загорается зеленый сигнал, сигнализирующий о возможности начала работ по переносу и кантованию груза, при этом
0 вакуум-насосное оборудование отключается. При натекании воздуха в грузозахватные камеры 25, 26, 27, 28 загорается лампочка красного цвета и автоматически включается вакуум-насосное оборудование 21. Так как
5 вакуумные грузозахватные камеры 25, 26, 27, 28 включены в пневмосеть попарно, то открывая или перекрывая соответственно вентили 29, 30, 31, можно изменить число работающих ВЗК, используя их для захвата,
0 подъема и кантования листового материала меньших габаритов. Например, перекрыв вентили 29, 30, 31, используют для работы только камеры 25, перекрывая вентилем 29 камеры 28, используют для работы камеры
5 25,26,27 и т.д., т.е. отключать камеры 26,27, 28 можно в любой последовательности и в любой комбинации попарно в зависимости от габаритов транспортируемого груза. Так как в устройстве ось 33 рамы 15 смещена относительно оси 34 траверсы
11, это позволяет производить грузозахват- ные:работы в труднодоступных местах и ограниченном пространстве, например, производить остекление витрин, подъем и кантование витражей, стекол и др., а также подаем и кантование листов металла и стекла различных типоразмеров. Захват и кан- листовых материалов различных типоразмеров на данном устройстве возможно производить из-за наличия управля- ЮЩ1Х вентилей 29, 30, 31, которые отк: ючагот от вакуумной сети грузозахватные камеры 26, 27, 28 попарно одним вентилем, что повышает эксплуатационные возможности устройства.
При использовании данного устройства рез||о облегчаются работы, связанные с захватом и переносом листовых материалов в вертикальном положении, так как небольшое смещение осей рамы и траверсы позво- ляет производить работы в ограниченных и стеснённых пространствах, а также вра- щаН устройство вместе с грузом на крюке Kpaijia вокруг вертикальной оси. Привод 10 дистанционного управления позволяет про-
изводить кантовку грузов, имеющих большие габариты по длине и ширине, так как ось балки 9 ресивера 10 будет находиться высоко от земли вместе с приводным блоком 19.
Ф о рмула изобретения Грузозахватное устройство, содержащее траверсу с вакуумным оборудованием, шарнирно закрепленную на траверсе раму с вакуумными захватами, механизм поворота рамы относительно траверсы и противовес, отличающееся тем, что, с целью улучшения эксплуатационных характеристик путем обеспечения работы с устройством в труднодоступных местах, траверса выполнена с жестко закрепленными на ее концах щеками, ось шарнира поворота рамы расположена на щеках параллельно и ниже продольной оси траверсы и смещена относительно нее в сторону на расстояние, превышающее ширину траверсы, при этом противовес закреплен на боковой поверхности траверсы, противолежащей оси поворота рамы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВПТ5;•?"?>&' | 1973 |
|
SU406793A1 |
| Траверса | 1989 |
|
SU1726350A1 |
| Крановый подвесной захват | 1974 |
|
SU570539A1 |
| МОНТАЖНОЕ НАВЕСНОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2235672C2 |
| Захват-кантователь | 1987 |
|
SU1518270A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Башенный кран | 1978 |
|
SU775043A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| ТРАВЕРСА ГОРИЗОНТАЛЬНОЙ СТЫКОВКИ, БЛОК ЗАДАНИЯ НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, БЛОК КОМПЕНСАЦИИ ВЕКТОРА НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, СПОСОБ НАСТРОЙКИ БАЛАНСИРОВКИ ТРАВЕРСЫ | 2008 |
|
RU2374164C1 |
| ТРАВЕРСА | 2002 |
|
RU2225826C1 |
Использование: устройство может быть использовано в промышленности строительных материалов, строительстве и различных отраслях промышленности Дли подъема и кантования различных грузов, листов (металл, стекло) и т.д. Вакуумное грузозахватное устройство содержит траверсу с вакуум-насосным оборудованием, раму с вакуумными захватами и механизмом поворота рамы. Ось механизма поворота расположена со смещением относительно оси рамы в сторону траверсы. Каждая Пара вакуумных захватов снабжена узлом перекрытия отсоса воздуха. На балке ресивера установлены противовесы. Рама оборудована приводом дистанционного управления. 3 ил.
| УСТРОЙСТВО ДЛЯ МОНТАЖА НРЕИМУЩЕСТВЕННО СТЕКЛОКОНСТРУКЦИЙ | 0 |
|
SU161109A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
