(54) MEXAHHSAI УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ НО}1 ЕВОГО РАБОЧЕГО ОРГАНА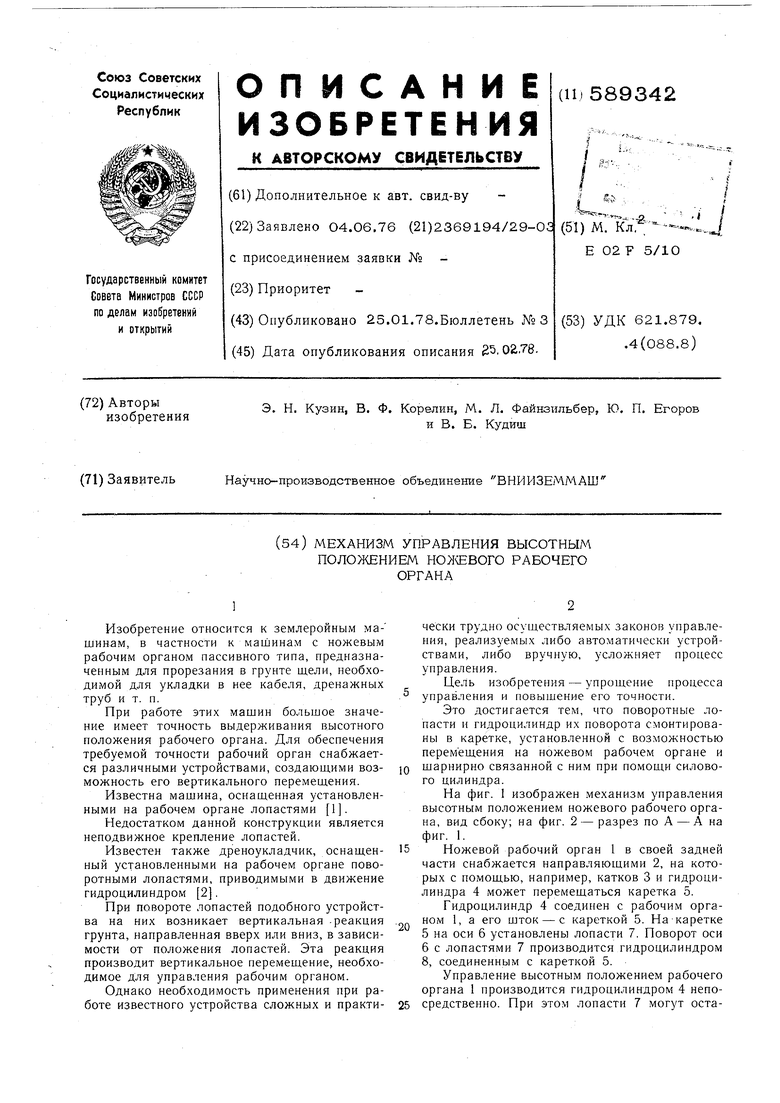
| название | год | авторы | номер документа |
|---|---|---|---|
| Бестраншейный дреноукладчик | 1982 |
|
SU1055831A1 |
| Устройство для управления положением рабочего органа землеройных машин | 1976 |
|
SU726277A1 |
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |
| Рабочий орган бестраншейного дреноукладчика | 1982 |
|
SU1102865A1 |
| Рабочий орган грейдер-элеватора | 1990 |
|
SU1808924A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕГРУЗОЧНЫМ УСТРОЙСТВОМ | 2012 |
|
RU2593322C2 |
| Землеройная машина | 2024 |
|
RU2834358C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
| УСТРОЙСТВО РАЗРАБОТКИ ГРУНТА ИЗ-ПОД ТРУБОПРОВОДА | 2000 |
|
RU2252302C2 |
| Устройство автоматического управления дреноукладчиком | 1980 |
|
SU960393A1 |
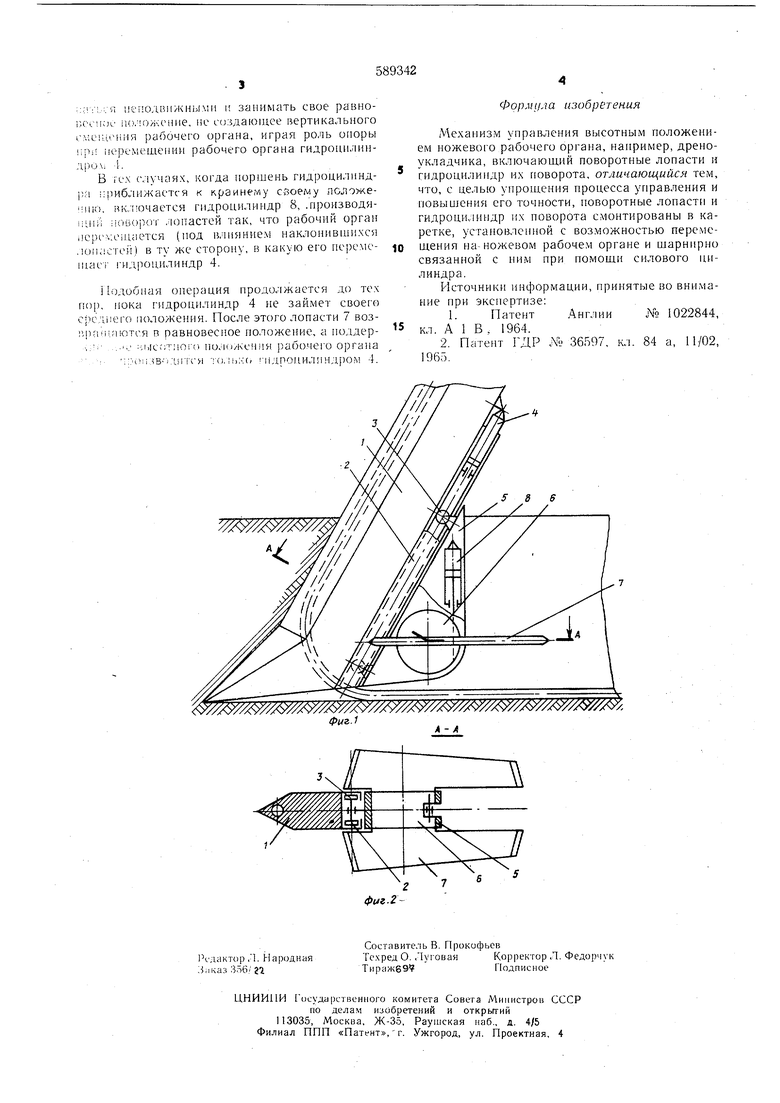
Изобретение относится к землеройным машинам, в частности к маилинам с ножевым рабочим органом пассивного типа, предназначенным для прорезания в грунте щели, необходимой для укладки в нее кабеля, дренажных труб и т. п. При работе этих машин большое значение имеет точность выдерживания в.ысотного положения рабочего органа. Для обеспечения требуемой точности рабочий орган снабжается различными устройствами, создаюш,ими возможность его вертикального перемещения. Известна машина, оснащенная установленными на рабочем органе лопастями 1. Недостатком данной конструкции является неподвижное крепление лопастей. Известен также дреноукладчик, оснащенный установленными на рабочем органе поворотными лопастями, приводимыми в движение гидроцилиндром 2. При повороте лопастей подобного устройства на них возникает вертикальная .реакция грунта, направленная вверх или вниз, в зависимости от положения лопастей. Эта реакция производит вертикальное перемещение, необходимое для управления рабочим органом. Однако необходимость применения при работе известного устройства сложных и практически трудно осуществляемых законов управленяя, реализуемых либо автоматически устройствами, либо вручную, усложняет процесс управления. Цель изобретения - упрощение процесса управления и повышение его точности. Это достигается тем, что поворотные лопасти и гидроцилиндр их поворота смонтированы в каретке, установленной с возможностью перемещения на ножевом рабочем органе и шарнирно связанной с ним при помощи силового цилиндра. На фиг. 1 изображен .механизм управления высотным положением ножевого рабочего органа, вид сбоку; на фиг. 2-разрез по А - А на фиг. 1. Ножевой рабочий орган 1 в своей задней части снабжается направляющими 2, на которых с помощью, например, катков 3 и гидроцилиндра 4 может перемещаться каретка 5. Гидроцилиндр 4 соединен с рабочим органом 1, а его шток - с кареткой 5. На каретке 5на оси 6 установлены лопасти 7. Поворот оси 6с лопастями 7 производится гидроцилиндром 8, соединенным с кареткой 5. Управление высотным положением рабочего органа 1 производится гидроцилиндром 4 непосредственно. При этом лопасти 7 могут оста
