В существующих изодромных регуляторах необходимо изменять время изодрома для приведения в соответствие иараметров регулятора с нараметрами объекта регулирования. В регуляторах с гидравлическим замедлением это обычно осуществляется игольчатым клапаном, который изменяет проходное сечение перетекающей жидкости. Применяя игольчатый клапан, трудно добиться широких пределов изменения времени изодрома и, еще труднее, точной градуировки игольчатого клапана.
Изобретение относится к устройствам для изодромного регулирования мощности двигателей и других физических параметров, взаимосвязанных с числом оборотов, в каковых устройствах центробежный регулятор связан с сервомотором рычагом, находящимся под воздействием пружин, и обычным катарактом.
В предлагаемом устройстве применены фиксированные опоры для пружин, воздействующих на рычаги, и подвижный вдоль рычага шарнир, что дает возможность изменения времени
изодрома при сохранении нулевого значения остающейся неравномерности регулирования.
Изменение времени изодрома возможно в широких пределах как в сторону увеличения его, так и в сторону уменьшения; кроме того, градуировку можно сделать более точной.
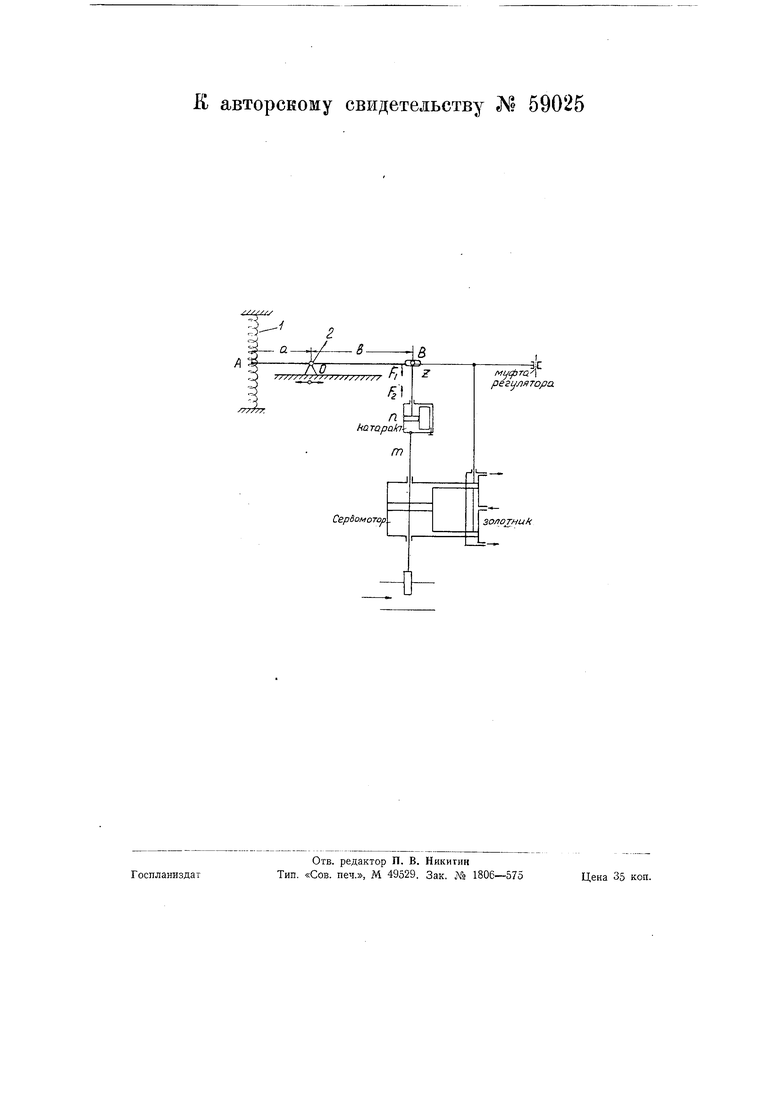
На чертеже изображена схема устройства для изодромного регулирования мощности двигателей и других флзически параметров, взаимосвязанных с числом оборотов.
В предлагаемом устройстве пружины I с фиксированными опорами возвращают точку В обратной связи в начальное положение, действуя на конец А рычага АОВ, другой конец которого воздействует на точку В обратной связи. Рычаг АОВ имеет подвижной вдоль рычага шарнир 2, па котором и качается рычаг.
Покажем, что при перемещении точки опоры О, т. е. шарнира 2 рычага АОВ, будет изменяться и время изодрома. Для этого выведем уравнение обратной связи.
Обозначим через т перемещение по:ршня сервомотора, через Z - перемещение точки обратной связи, через п - перемещение поршня катаракта относительно его цилиндра. Кроме того, обозначим через а -л b плечи рычага АОВ и с - жесткость пружины 1. Перемещение точки обратной связи равно перемещению поршня сервомотора минус перемещение поршня катаракта относительно его цилиндраZ m Приведенная к точке В жесткость пружины; np;iB - 2 Считаем силу сопротивления катаракта пропорциональной скорости перемещения поршня относительно цилиндраF -А.- dt где k - коэфициент пропорциональности. Сила натяжения пружины, приведенная к точке В, СпрИВ J,2 Сила сопротивления катаракта равна приведенной силе натяжения пружиобразомТаким 7 /7 ны, т. е. 1л откуда Диференцируя уравнение (1) и подdn,п ставляя из уравнения (2), имеем: dm а с у. V k .ИЛИ иначе dZ . г 0. dt i ба . А «2 с Переходя к относительным величинам, имеем: у ti I max/ « -imas l- -U. йЗ ИЛИ деля на Zmax, получим ., , 5т„ .1J.. Обозначая р и - . А г,имеем: + J., получая таким образом уравнение гибкой обратной евязи в форме ТоИе. При а -- b время изодрома равно - Г/д. Это время является временем изодрома в случае нормальной схемы изодромного регулирования при пружине, непосредственно помещенной в точку обратной связи. &Таким образом TI - Г/,. Следовательно, перемещением точки опоры О рычага АОВ можно изменить отношение плеч а и Ь, что в свою очередь будет изменять время изодрома. Это изменение возможно в очень широких пределах. Например, если отношение плеч можно изменить от 0,1 до 10, то изменение времени изодрома будет в 10 000 раз. В случае же регулирования перетока жидкости в катаракте эти пределы еще более расширяются. Шарнирное соединение рычагов в точке В должно быть выполнено с учетом необходимости небольшой слабины в направлении горизонтальной оси, что схематически показано на чертеже. Предмет изобретения. Устройство для изодромного регулирования мощности и других физических параметров, взаимосвязанных с числом оборотов, в котором центробежный регулятор связан с сервомотором рычагом, находящимся под воздействием пружин, и обычным катарактом, отличающееся тем, что, для возможности изменения времени изодрома при сохранении нулевого значения остающейся неравномерности регулирования, применены фиксированные опоры для пружин 1 и подвижный вдоль рычага шарнир 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор скорости непрямого действия | 1982 |
|
SU1054560A1 |
| ИЗОДРОМНЬШ РЕГУЛЯТОР СКОРОСТИ | 1966 |
|
SU181446A1 |
| Электрический регулятор | 1940 |
|
SU59536A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ ДЛЯ ГИДРОТУРБИНЫ | 1967 |
|
SU201986A1 |
| ИЗОДРОМНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НЕПРЯМОГО ДЕЙСТВИЯ | 1991 |
|
RU2010289C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НЕПРЯМОГО ДЕЙСТВИЯ | 1991 |
|
RU2010328C1 |
| СПОСОБ УЛУЧШЕНИЯ КАЧЕСТВА РЕГУЛИРОВАНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2179253C2 |
| РЕГУЛЯТОР УРОВНЯ | 1972 |
|
SU434386A1 |
| ДВУХИМПУЛЬСНЫЙ РЕГУЛЯТОР СКОРОСТИ | 1967 |
|
SU214946A1 |
| ПРОПОРЦИОНАЛЬНО-ДИФФЕРЕНЦИРУЮЩИЙ РЕГУЛЯТОР МУЗЫЧУКА | 1992 |
|
RU2010291C1 |