колес с осью контролируемого колеса, равен удвоенному углу их зацепления. На фиг. 1 представлена принципиальная схема прибора для осуществления предлагаемого способа; на фиг. 2 - схема измерения; на фиг. 3 - вид по стрелке А на фиг. 2. На корпусе 1 прибора устанавливаются, направляющие 2 и 3, которые прикрепляются к корпусу, например, при помощи ша рнирного соединения 4 для обеспечения требуемого угла между межосевыми линиями передач, образуемых измерительными колесами с контролируемым колесом. Направляющие фиксируются в необходимом положении винтом 5, входящим в кольцевой паз 6. На направляющих установлены каретки 7 и 8 с закрепленными на них измерительными колесами - винтовыми или прямозубыми. Измерительные колеса крепятся к каретке так, что могут вращаться вокруг своих осей и поворачиваться на необходимый угол скрещивания 7 (см. фиг. 3) для обеспечения правильного зацепления. Соосно с винтовыми колесами 9 и 10 укреплены иреобразователи И и 12 движения этих колес в электрические сигналы. Нреобразователь 11 движения соединен с валом колеса 10 через муфту 13 для обеспечения правильной начальной на.стройки прибора. Вал колеса 10 соединен с приводом 14. Способ осуществляется следующим образом. Установив номинальные межосевые расстояния измерительных колес с контролируемым, измерительные колеса вводят в однопрофильное зацепление с контролируемы.м колесом так, что угол между линиями передач, лежащими в плоскости измерения и соединяющими оси измерительных колес с контролируемым, равен удвоенному углу их зацепления, приводят во вращение одно из измерительных колес. Имеющиеся в реальном колесе погрещности приведут к рассогласованию движения между измерительными колесами ,), где Афн -угол рассогласования движения измерительных колес; APR, &.FII - приращения правой и левой линий зацепления контролируемого колеса; - радиус основной окрул ности измерительного колеса. Угол рассогласования движения измерительных колес при этом пропордионален тангенциальным составляющим кинематической погрешности зубчатого колеса. Предлагаемый способ позволяет повысить производительность контроля по сравнению с дискретным способом измерения тангенциальных погрещностей и обеспечить возмолсность контроля тангенциальных погрешностей по сравнению с прототипом. Формула изобретения Способ контроля зубчатых колес с использованием двух измерительных зубчатых колес, преобразователей движения этих колес в электрические сигналы и связанного с этими преобразователями через электронный блок регистрирующего элемента, заключающийся в том, что измерительные колеса вводят в однопрофильное зацепление с контролируемым колесом и регистрируют рассогласование движения между измерительными колесами, по которому судят о погрешиостях контролируемого колеса, отличающийся тем, что, с целью контроля тангенциальных составляющих кинематической погрешности, измерительные колеса располагают так, что угол между линиЯ:МИ, лежащими в плоскости измерения и соединяющими оси измерительных колес с осью контролируемого колеса, равен удвоенному углу их зацепления. Источники информации, принятые во внимание при экспертизе 1.Тайц Б. А. Точность и контроль зубчатых колес. 1972, с. 275-283. 2.Авторское свидетельство СССР Afb 462975, кл. G01B 5/20, 1972.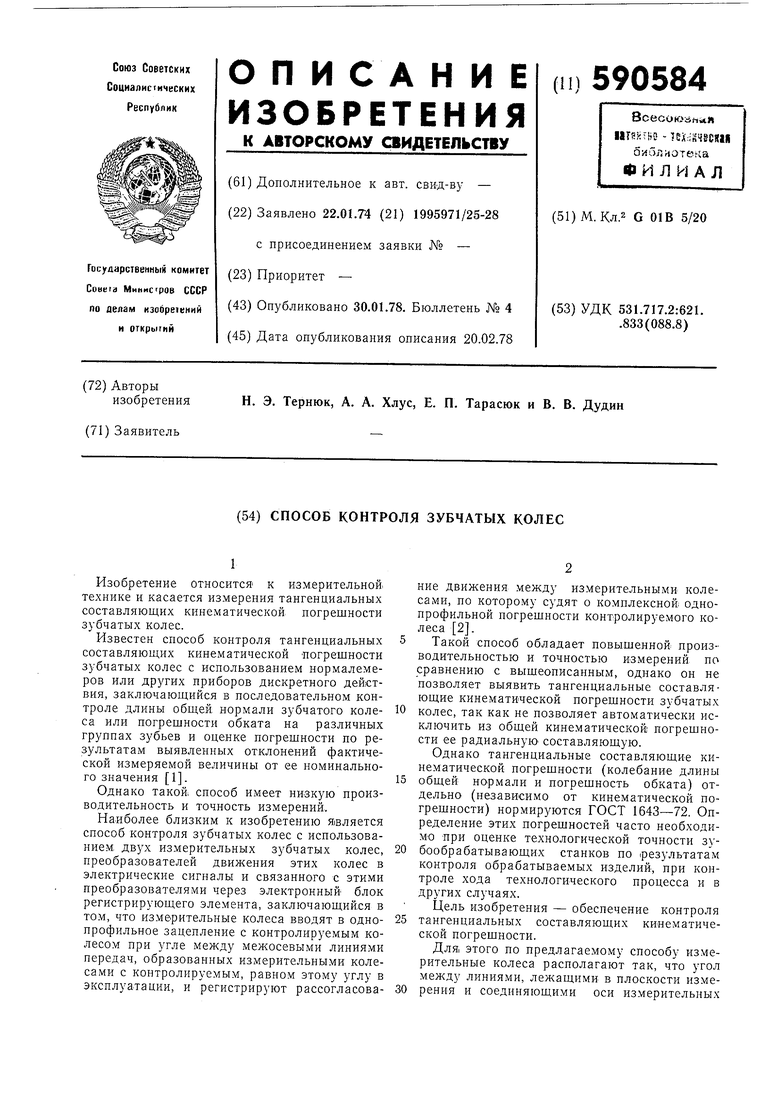
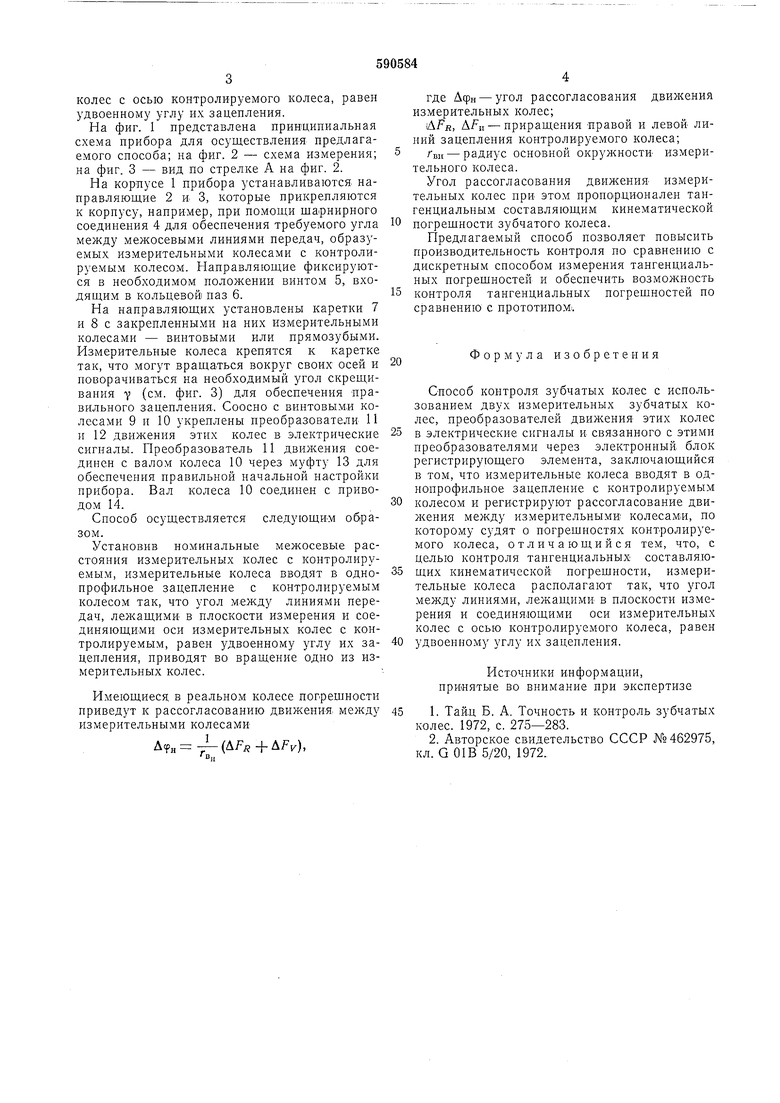
(Риг. 2
Вид А
