(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1974 |
|
SU522958A1 |
| Захватное устройство | 1984 |
|
SU1196263A1 |
| Схват манипулятора | 1982 |
|
SU1060471A1 |
| Манипулятор | 1976 |
|
SU538957A1 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
| УПЛОТНЕНИЕ ПОДВИЖНОГО ВАЛА ГИДРАВЛИЧЕСКОЙ МАШИНЫ (ВАРИАНТЫ) | 2008 |
|
RU2405994C2 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ ДЛЯ ПОГРУЖЕНИЯ СТЕРЖНЕЙ В ГРУНТ | 2010 |
|
RU2443827C1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Манипулятор для кладки кирпича | 1990 |
|
SU1767131A1 |
| Грузозахватное устройство | 1985 |
|
SU1350100A1 |
Изобретение относится к машиностроению и может быть применено, например, в промышленных работах.
По основному авт. св. № 522958 известен захват манипулятора, содержащий эластичный торообразный мешок с диафрагмой, соединенной со штоком, и размешенный в неповоротной продольно-подвижной обойме.
Недостатком такого устройства является то, что его Механический привод ухудшает технологические .oжнocти манипулятора и уменьшает область его применения.
Цель изобретения - расширение технологических возможностей захвата манипулятора.
Для этого шток снабжен двумя поршнями, размещенными в двух самостоятельных гидроцилиндрах, один из которых прикреплен к обой.ме, а другой - к корпусу захвата, причем площадь сечения первого цилиндра в полтора раза меньше площади сечения второго.
На чертеже схематично изображено предлагаемое устройство.
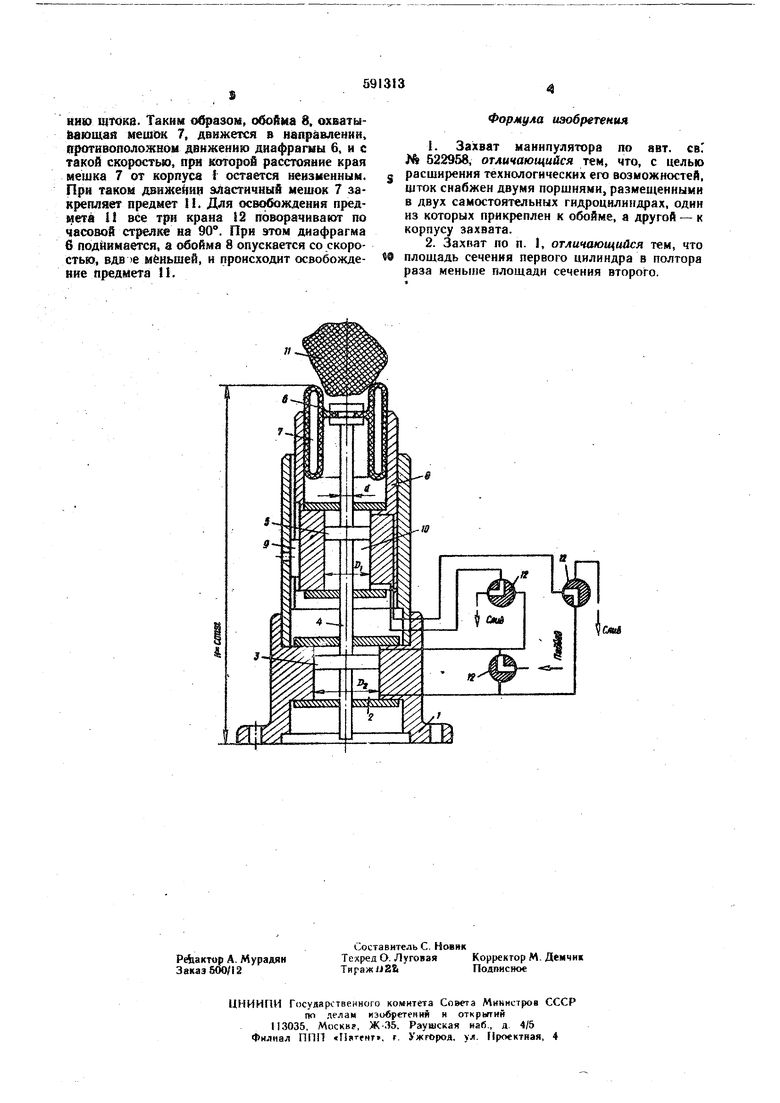
Устройство содержит корпус 1, в котором размешен гидроцилиндр 2, имеющий диаметр DJ, и порилень 3, смонтированный на штоке 4. На последнем закреплен второй поршень 5, перемещающийся в гидроцилиндре диаметром D |. Конец штока 4 прикреплен к диафрагме
6 торообразного эластичного надувного мешка 7, размещенного в обойме 8. Шпонка 9 исключает возможность поворота относительно корпуса 1 обоймы 8, а которой установлен гидроцилиндр 10. Площадь сечения последнего в 1,5 раза меньше площади сечения гидроциликдре 2. Управление гидроцилйндр ами 2 и 10 при захвате предмета 11 осуществляется, например, при помош,и трех поворотных кранов 12.
Захват манипулятора работает следующим образом.
Давление через кран 2 передается в верхнюю полость гидроцилиндра 2 и вызывает движение штока 4 вниз. При этом диафрагма 6 опускается, мешок 7 перекатывается внутри обоймы 8. Жидкость из нижней полости гидроцилиндра 2подается в верхнюю полость цилиндра 10, нижняя полость которого в это.время соединена с магистралью слива.
Скорость движения гидроцилиндра 10 относительно поршня 5 в полтора раза больше, чем
скорость движения штока 4 относительно корпуса 1. Это позволяет не только компенсировать опускание поршня 5, но и придавать обойме 8 движение относительно корпуса 1 со скоростью, равной половине скорости движения штоКЗ 4 в направлении, противоположном движению tiitOKa. Таким образом, обойма 8. охваты&ающай мешок 7, движется в направлении. Противоположном движению диафрагмы 6, и с такой скоростью, при которой расстояние края мешка 7 от корпуса остается неизменным. При таком движей и0 эластичный мешок 7 закрепляет предмет tl. Для освобождения предмете 1 все три крана 12 поворачивают по часовой стрелке на 90. При этом диафрагма 6 подйимается, а обойма 8 опускается со скоростьво, ВДВ )е меньшей, и происходит освобождение предмета П.
Формула изобретения
расширеиия технологических его возможностей, шток снабжен двумя поршнями, размещенными в двух самостоятельных гидроцилиндрах, один из которых прикреплен к обойме, а другой - к корпусу захвата.
плошадь сечения первого цилиндра в полтора раза меньше площади сечения второго.
с«а
