Изобретение относится к здхватньлм устройствам для промышленных манипуляторов, предназначенных для механизации и автоматизации производстве ных процессов. Известен схват манипулятора, соде жащий цилиндрический корпус, шток с поршнем, крышку и эластичный торообразный мешок Щ . Недостатками этого схвата являются сложность конструкции и низкая надежность работы. Цель изобретения - повышение наде ности работы схвата. Поставленная цель достигается тем что в охвате манипулятора, содержащем корпусс цилиндрической полостью в которой расположен поршень со штоком, крышку и эластичный торообразный мешок,внутренняя полость последнего соединена ей штоковой полостью корпуса, а поршневая полость корпуса соединена посредством дополнитель но выполненных в крышке отверстий с полостью, образованной наружной поверхностью торообразной камеры и йоверхностью полости корпуса. На чертеже изображена схел а, манипулятора, общий вид. Схват манипулятора содержит цилиндрический корпус 1, внутри которого находится шток 2 с поршнем 3. На фланце корпуса 1 при помощи шайб 4 и 5 закреплена торообразная эластичная камера 6, полость которой соединена со штоковой полостью корпуса посредством трубопровода 7 и канала 8. Сверху корпус 1 герметично закрыт КРЫШКОЙ 9, а снизу внут ри него установлена крышка 10 с рядом отверстий. Схват манипулятора работает сле 1ующим образом. В исходном состоянии шток 2с поршнем 3 находится в нижнем положении возле крышки 10. Схват подводится к. детали. Шток 2, соединенный . с приводом манипулятора (не показан движется вверх. Эластичная торооб- . разная камера б начинает охватывать деталь. Воздух из штоковой полости б корпуса 1 по трубопроводу 7 и каналу 8 нагнетается в полость q камеры б. Камера б растягивается и плотно захватывает деталь. Крышка 10 с отверстиями является упором для захватываемой детали. Для освобождения детали шток 2 с поршнем 3 движется в обратном направлении (вниз). Воздух перетекает из полости а камеры бв штоковую полость б корпуса 1. Эластичная камера б принимает начальное состояние. Предлагаемая конструкция схвата позволяет надежно захватывать детали самой различной конфигурации. Благодаря тому, что губками является эластичная камера, схват может захватывать хрупкие детали, не повреждая их. При захвате цилиндрических сплошных деталей образуется вакуум, способствующей более надежному захвату. Кроме того, предлагаемая конструкция схвата позволяет захватывать детали определенной конфигурации непосредственно из навала, что значительно упрощает общую схему автоматизации и механизации производственных процессов.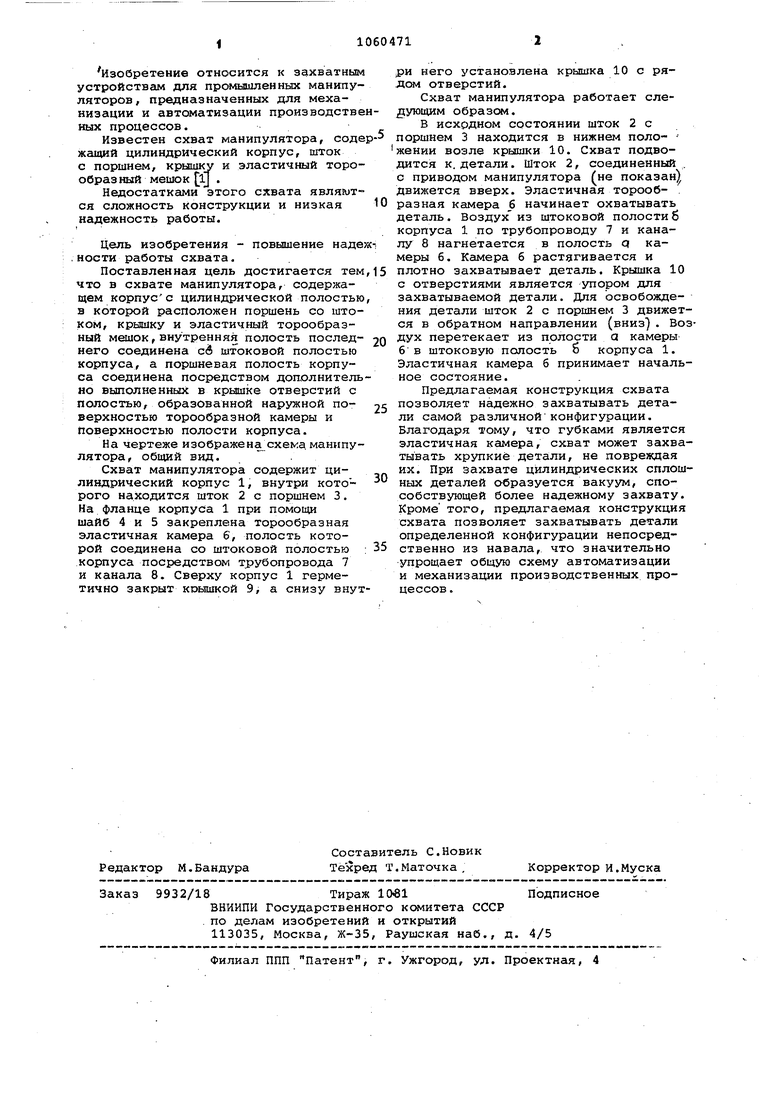
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный схват манипулятора | 1986 |
|
SU1421533A1 |
| Схват | 1990 |
|
SU1756143A1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Схват | 1989 |
|
SU1701516A1 |
| Захватное устройство | 1987 |
|
SU1414636A1 |
| Податливое сборочное устройство | 1989 |
|
SU1691095A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| Податливое сборочное устройство | 1989 |
|
SU1708604A1 |
СХВАТ МАНИПУЛЯТОРА, содержащий корпус с цилиндрической полостью, в которой расположен поршень со штоком, крышку и эластичный торсобразный мешок, отличающийс я тем, что, с цепью повышения надежности, внутренняя полость торообраэного мешка соединена со штоковой полостью корпуса, а поршневая полость корпуса соединена посредством дополнительно выполненных в крышке отверстий с полостью, образованной наружной поверхностью торообразной камеры и поверхностью полости корпуса. g
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1975 |
|
SU591313A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
