113
Изобретение относится к робототехнике и может быть использовано в конструкциях захватных устройств манипуляторов .
Целью изобретения является расширение технологических возможностей за счет обеспечения захвата и отпускании детали в любой точке рабочей зоны манипулятора.
На фиг.1 показан вакуумный захватный орган, общий вид; на фиг.2 - схема работы вакуумного захватного органа.
Вакуумный захватньй орган содержит корпус 1, расположенный.на держателе. 2, прикрепленном к руке манипулятора. На нижнем конце корпуса 1 установлена с помощью гайки 3 эластичная присоска 4. Корпус Т снабжен гидроцилинд- ром, в котором размещён шток 5 с поршнем 6, поджатым пружиной 7. Шток 5 соединен с одноплечим рычагом 8 посредством поворотного упора 9. Рычаг 8 смонтирован .на оси, закрепленной в корпусе 1. Рычаг В своим незакрепленным концом взаимодействует с деталью 10, причем на этом конце рычага установлена на резьбе регулируемая по высоте головка 11. Конец штока 5 закрывает центральное отверстие, соединяющее внутреннюю полость.присоски с атмосферой за счет прижатия пружиной (7. Поршень 6 делит гидроцилиндр на надпоршневую и штоковую полости, ко- торые соединены между собой перепускным каналом. На корпусе 1 закреплен .дросселирующий элемент 12, изменяющий проходное сечение перепускного канала. Кроме того, рычаг 8 подпружинен относительно корпуса 1 пружиной 13, жесткость которой достаточна для возвращения рычага в исходное положение, но при этом существенно меньше жест
соски 4 рычаг 8, опираясь на деталь, перемещается и Приводит в движение связанный с ним посредством поворотного упора 9 шток 5. Шток 5 и жестко связанный с ним поршень 6 перемещаются, сжимая пружины 7 и 13. Под давлением порщня 6 рабочая жидкость из надпоршневой полости перетекает через перепускной канал с дросселирующим элементом 12 и штоковую полость. При достижении рычагом 8 верхней точки, устанавливаемой регулируемой головкой 11 в зависимости от веса детали и предела деформации присоски, поворотный упор 9 выходит из зацепления со штоком 5 (фиг.2 б). Порщень 6 под действием пружины 7 начинает возвращаться в исходное положение, при этом рабочая жидкость из штоковой полости перетекает в надпоршневую полость через перепускной канал с дросселирую- щим элементом 12. Наличие дросселирующего элемента приводит к замедлению движения поршня 6 и штока 5, что позволяет установить интервал времени, в течение которого центральное отверстие в присоске 4 остается открытым. Время возвращения штока 5 в исходное Положение устанавливают путем регулирования площади проходного сечения перепускного канала посредством дросселирующего элемента 12. После закрытия центрального отверстия, соединяющего полость присоски с атмосферой, рука манипулятора перемещает деталь на рабочую позицию. Эластичная присоска 4 стремится принять исходную форму, что вызывает увеличение ее внутренней полости, а следовательно, приводит к -понижению давления в ней, обеспечивая захват детали за счет прижатия ее атмосферным давлением. При этом рычаг 8 возвращается в ис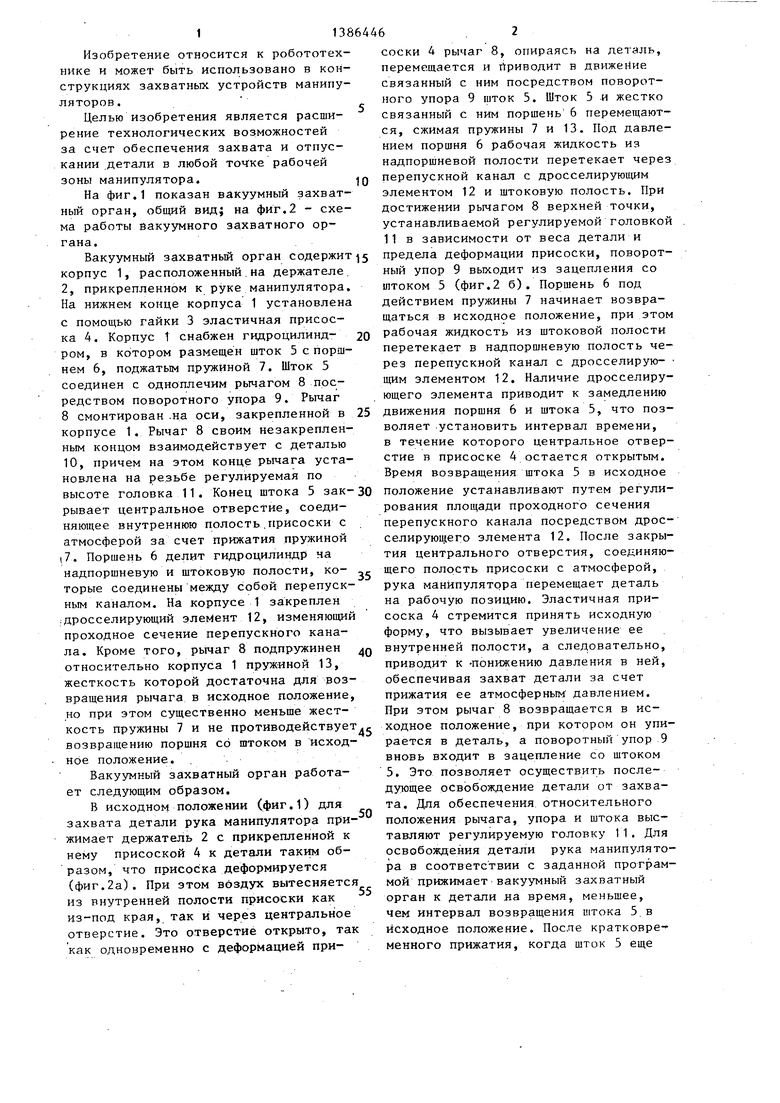

| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Вакуумный схват манипулятора | 1986 |
|
SU1421533A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Захватно-срезающее устройство | 1982 |
|
SU1135460A1 |
| Манипулятор | 1985 |
|
SU1315299A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Схват манипулятора | 1989 |
|
SU1684028A1 |
Изобретение относится к области робототехники и может быть использовано в конструкциях захватных устройств манипуляторов. Целью изобретения является расширение технологических -возможностей за счет обеспечения захвата и отпускания детали в любой точке рабочей зоны манипулятора. Для этого корпус 1 снабжен гидроцилиндром с поршнем 6. Надпоршневая и штоковая полости гидроцилиндра соединены перепускным каналом с регулируемым дросселирующим элементом 12. Шток 5 поршня 6 жестко связан с запорным органом клапана, сообщающего полость присоски с атмосферой. На корпусе 1 шар- нирно установлен одноплечий рычаг 8, взаимодействующий со штоком 5 посредством поворотного упора 9. При опускании захватного органа на деталь рычаг 8 поднимает шток 5с порщнем 6, при этом поршень 6 сжимает пружину 7. После выхода поворотного упора 9 из зацепления со штоком 5 поршень 6 под действием пружины 7 начинает возвращаться в исходное положение. При закрытии центрального отверстия,сообщающего полос ть присоски с атмосферой, запорным органом клапана рука манипулятора поднимает захватный орган вместе с деталью. 2 ил. (О (Л со 00 о 4 О) Фиг.}
кость пружины 7 и не противодействует., ходное положение, при котором он упивозвращению поршня со штоком в исходное положение. . .
Вакуумный захватный орган работает следующим образом.
В исходном положении (фиг.1) для захвата детали рука манипулятора при жимает держатель 2 с прикрепленной к нему присоской 4 к детали таким образом, что присоска деформируется (фиг.2а). При этом воздух вытесняется из внутренней полости присоски как из-под края, так и через центральное отверстие. Это отверстие открыто, так как одновременно с деформацией при-50
55
рается в деталь, а поворотный упор 9 вновь входит в зацепление со штоком 5. Это позволяет осуществить последующее освобождение детали от захвата. Для обеспечения относительного положения рычага, упора и штока выставляют регулируемую головку 11. Для освобождения детали рука манипулятора в соответствии с заданной программой прижимает вакуумный захватный орган к детали на время, меньшее, чем интервал возвращения штока 5. в исходное положение. После кратковре менного прижатия, когда шток 5 еще
0
5
рается в деталь, а поворотный упор 9 вновь входит в зацепление со штоком 5. Это позволяет осуществить последующее освобождение детали от захвата. Для обеспечения относительного положения рычага, упора и штока выставляют регулируемую головку 11. Для освобождения детали рука манипулятора в соответствии с заданной программой прижимает вакуумный захватный орган к детали на время, меньшее, чем интервал возвращения штока 5. в исходное положение. После кратковре менного прижатия, когда шток 5 еще
поднят и центральное отверстие в присоске открыто, рука манипулятора отводит вакуумный захватный орган от детали, который освобождается от захвата, так как давление во внутренней полости присоски равно атмосферному. Шток 5, поршень 6 и рычаг 8 под действием пружин 7 и 13 возвращаются в исходное положение: вакуумный захватный орган готов - к возобновлению цикла работы.
Формула изобретения
Вакуумный захватный орган, содер- жащий полый цилиндрический корпус с присоской, в котором установлен клапан, сообщающий полость присоски с атмосферой, рычаг, шарнирно установ«Раг.г
ленный на корпусе и кинематически связанный с запорным органом клапана отличающийся тем, что, с целью расширения технологических возможностей, он снабжен гидроцилиндром с поршнем, шток которого жестко связан с запорным органом клапана, причем надпоршневая и штоковая полости гидроцилиндра соединены перепускным каналом с регулируемым дросселирующим элементом, а рычаг выполнен одноплечим, подпружинен относительно корпуса и снабжен поворотным упоррм, выполненным в виде собачки, имеющим возможность взаимодействия со штоком и регулируемой по высоте головкой, установленной на свободном конце рычага.
