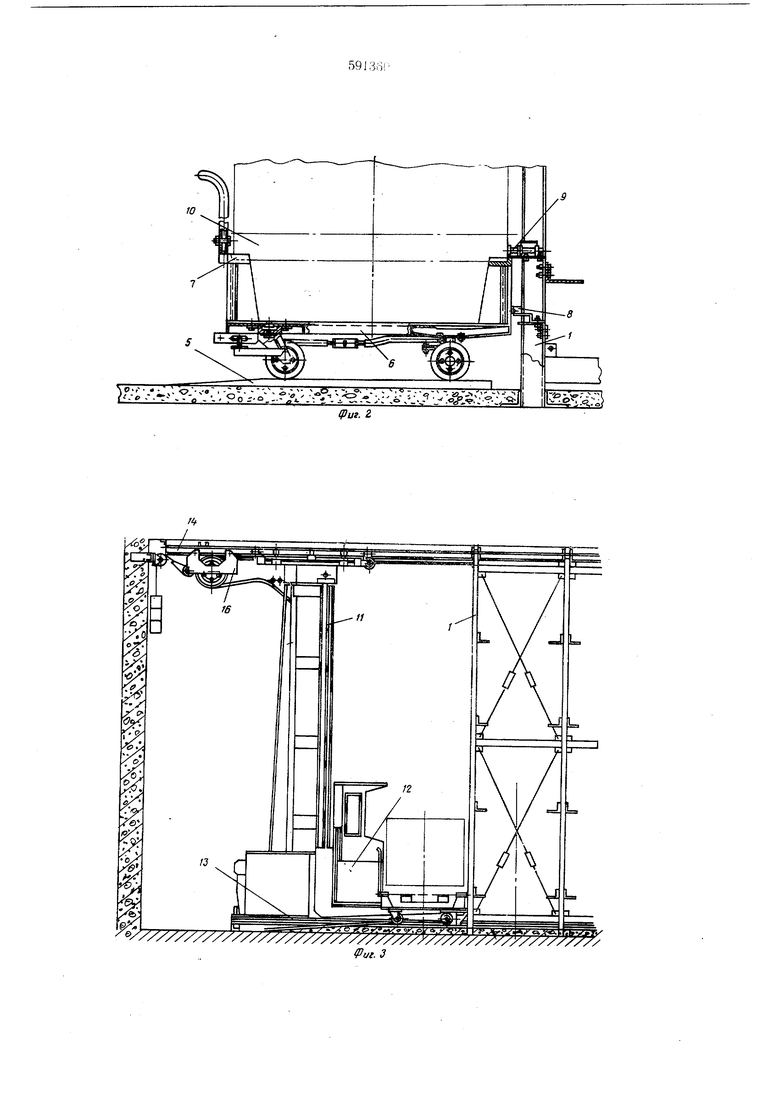
Изобретение касается механизации складских работ и относится к складским транспортным системам. Известен автоматизированный склад для хранения пакетированных грузов, содержащий многоярусные стеллажи, расположенные с проходом между ними, в каждом проходе размещен рельсовый путь, на котором установлен стеллажный кран-штабелер, контактирующий с закрепленной в верхней части стеллажей опорной балкой и снабженный мачтой с подъемноопускной кареткой, а также кабельную подвеску с гибким кабелем для подачи электроэнергии и управления складом i. Такой склад не производит бесперегрузочную транспортировку грузов от транспортных средств. Кроме того, известный склад имеет неудачную конструкцию кабельной подвески, из-за чего быстро изнашивается гибкий кабель, служащий для подачи электроэнергии и управления складом. Целью изобретения является бесперегрузочная передача грузов от транспортных средств, расположенных вне склада, до крана-штабелера и повыщение устойчивости последнего. Это достигается тем, что склад снабжен направляющими, размещенными в торце стеллажей параллельно рельсовым путям щтабелера, на которых установлены приемные тележки с укреп„ енными на них упорами для пакета, создающими зазор между пакетом и рамой тележки, а на стеллажах размещены датчики положения тележки на направляющих и пакета на тележке, причем в верхней части мачты крана-штабелера смонтированы подпружиненные тормозные ролики, контактирующие с опорной балкой. На фиг. 1 изображен предлагаемый автоматизированный склад, вид в плане; на фиг. 2 - загрузочно-разгрузочное устройство, вид спереди; на фиг. 3 - стеллажный кран-штабелер; на фиг. 4 - верхняя часть мачты с тормозными роликами; на фиг. 5 - кабельная подвеска штабелера. Автоматизированный склад состоит из многоярусных стеллажей 1, соединенных связями 2, стеллажного крана-штабелера 3 и пульта управления 4. На направляющих 5 в торце стеллажа установлена приемная тележка 6, снабженная упорами 7 для фиксации пакета. В торце стеллажа 1 размещены датчик 8 фиксации положения приемной тележки относительно стеллажа и датчик 9 фиксации грузового пакета 10 на тележке 6.
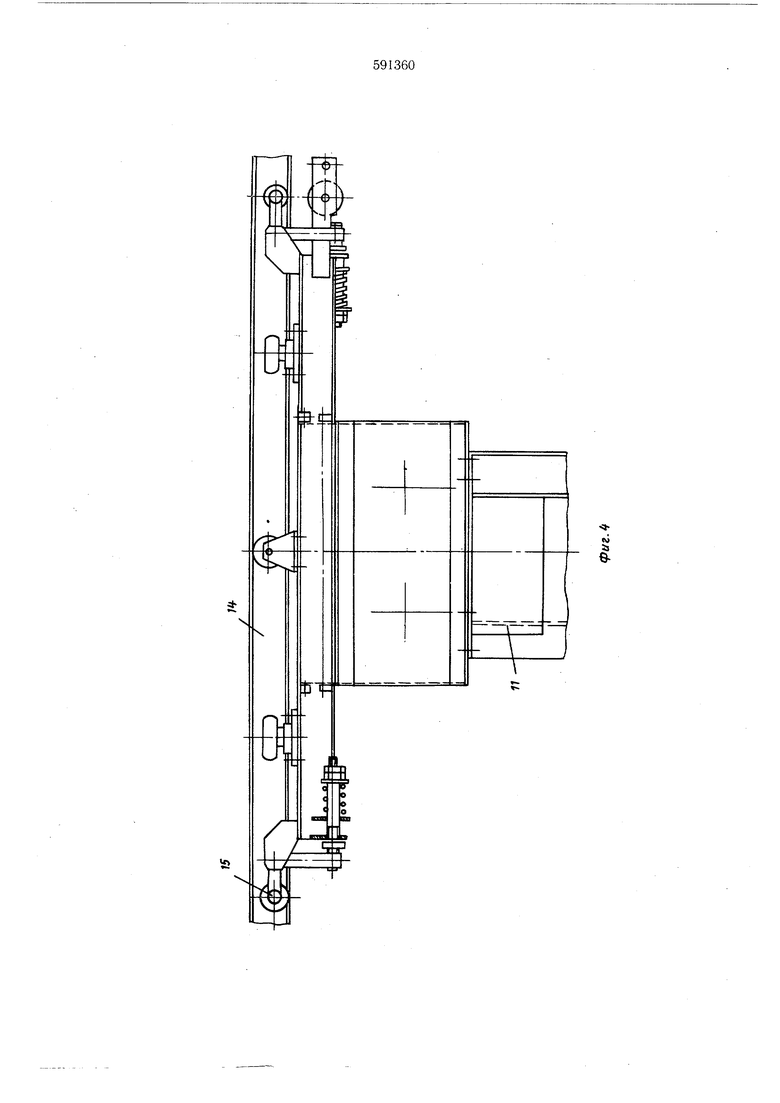
Стеллажный кран-штабелер 3 СОСТОРГГ из мачты 11 с подъемно-опускной кареткой 12 и кабельной нодвески с гибким кабелем для подачи электроэнергии и угфавлепия им. Штабелер опирается на нижний рельсовый путь 13 и опорную балку 14, закрепленную на связях 2. В верхней части мачты 11 штабелера установлены тормозные pOviHKH 15, контактирующие с опорной балкой 14.
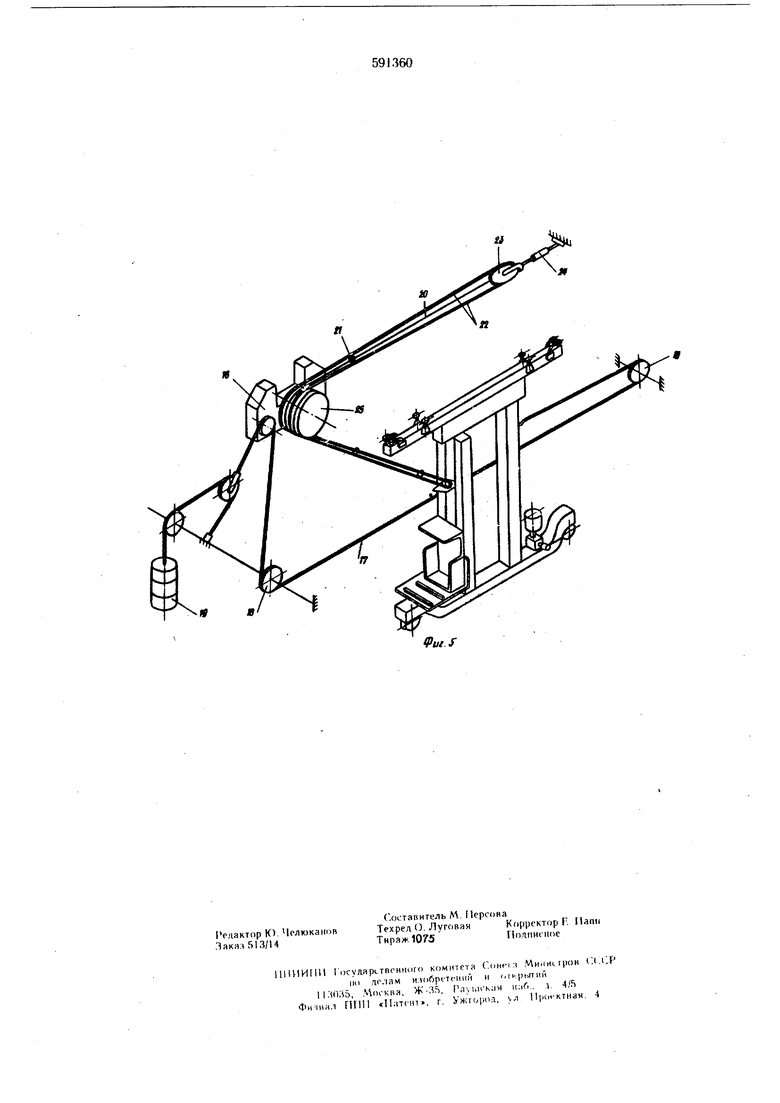
Кабельная подвеска с гибким кабелем для подачи электроэнергия и управления штабелером состоит из каретки 16, связанной со штабелером 3 канатом 17, пропуиденным через систему блоков 18 с противовесо.м 19, поддерживающим канат 17 в натянутом положении.
Блоки 18 крепятся в начале и конце трассы движения ц табелера обычно к стенам здания склада. Гибкий кабель 20 закрепляется Струбцинами 21 между двумя ветвями каната 22, огибающими блок 23, закрепленный с помощью винтовой стяжки 24 в средней части стеллажей 1, обслуживаемых краном-штабелером 3.
Гибкий кабель 20 вместе с канатом 22 огибас- барабан 25, закрепленный на каретке 16 и подсоединяется к мачте 11 крана-щтабелера.
Автоматизированный склад работает следующим образом.
При загрузке склада с помощью аккумулятооного тягача приемная тележка 6 с грузовым laiveTOM доставляется в зону загрузки автоматизированного склада. Оператор устанавливает приемную тележку 6 с грузовы.м пакетом в фиксированное положение на направляющих 5.
В случае наличия крана-щтабелера в исходном положении у приемной тележки оператор вкладывает программоноситель в считываюпдее устройство пульта автоматического управления 4 и включает кнопку «пуск.
В случае нажатия на датчик 8 фиксации положения приемной тележки и на датчик фиксации грузового пакета на тележке кран-щтабелер с по.мощью выдвижного вилочного захвата (не показан снимает грузовой пакет с прие.мной т .межки и транспортирует его по проходу с одновременным подъемом каретки до заданного яруса стеллажей 1. При этом каретка 16, огиба,емая кабельной подвеской с гибки.м кабелем, с помощью которого происходит питание электроэ1 ергией и управление штабелером, передвигается за ним за счет полисгшстной системы каната со скоростью, в два раза .меньщей, чем скорость птабелера, что снижает износ гибкого кабеля. У заданной ячейки стеллажей щтабелер
автоматически останавливается, выдвигает вилочный захват, укладывая грузовой пакет в заданную ячейку стеллажей, после чего щтабелер возвращается в исходное положение у приемной тележки.
При разгрузке склада оператор усанавливает пустую приемную тележку 6 на направляющих 5.
В случае наличия крана-щтабелера в исходном положении у приемной тележки оператор вкладывает програм.моноситель в считывающее устройство пульта автоматического управления 4 и включает кнопку «пуск. Штабелер перемещается вдоль прохода, снимает с заданной ячейки стеллажей грузовой пакет, доставляет его к приемной тележке 6 и устанавливает на ней.
На этом цикл работы щтабелера заканчивается. Оператор выкатывает приемную тележку с 1рузовым пакетом из направляющих и прицепляет к аккумуляторному тягачу, который доставляет ее в экспедицию
Формула изобретения
Автоматизированный склад для хранения пакетированных грузов, содержащий многоярусные стеллажи, расположенные с проходами между ними, .в каждом проходе размещен рельсовый путь, на котором установлен стеллажный кран-щтабелер, контактирующий с закрепленной в верхней части стеллажей опорной балкой и снабженный мачтой с подъемно-опускной кареткой, а также кабельную подвеску с гибким кабелем для подачи электроэнергии и управления складом, отличающийся тем, что, с целью бесперегрузочной передачи грузов от транспортных средств, расположенных вне склада, до крана-щтабелера и повыщения устойчивости последнего, склад снабжен направляющими, размещенными в торце стеллажей параллельно рельсовым путям щтабелера, на которых установлены приемные тележки с укрепленными на них упорами для пакета, а на стеллажах установлены датчики положения тележки на направляющих и пакета на тележке, причем в верхней части мачты крана-щтабелера смонтированы подпружиненные тормозные ролики, контактирующие с опорной балкой.
Источники информации, принятые во внимание при экспертизе;
1. Авторское свидетельство № 215637, кл. G 07 F 17/10,. 21. 07. 68.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Склад штучных грузов | 1975 |
|
SU818968A1 |
| Стеллажный кран-штабелер | 1981 |
|
SU984944A1 |
| Склад для штучных грузов | 1966 |
|
SU574364A1 |
| Комплекс для раскроя листового материала | 1985 |
|
SU1447585A1 |
| Кран-штабелер | 1980 |
|
SU893846A1 |
| Перегрузочное устройство для штучных грузов | 1973 |
|
SU500134A1 |
| СТЕЛЛАЖНАЯ КОНСТРУКЦИЯ МНОГОЯРУСНОГО СКЛАДА ВЫСОКОПЛОТНОГО ХРАНЕНИЯ ПОДДОНОВ С ГРУЗОМ, СОВМЕЩЕННАЯ С ТРАНСПОРТНЫМИ ПУТЯМИ ДЛЯ ГРУЗОПЕРЕМЕЩАЮЩИХ УСТРОЙСТВ | 2008 |
|
RU2369309C1 |
| КРАН-ШТАБЕЛЕР,Ф011ДЗ.;:.о^йа| | 1973 |
|
SU390002A1 |
| Кран-штабелер для загрузки иРАзгРузКи КОНТЕйНЕРОВ | 1978 |
|
SU819016A1 |
/777777777777.
n
:a
eSJ
Б
VD
