Устройство дешевых и удобных переправ через водные потоки является актуальным вопросом строительства шоссейных дорог.
Постройка мостов, в особенности при пересечении широких судоходных или горных рек, требует весьма больших капитальных затрат.
В целом ряде случаев при малых грузопотоках можно обойтись без мостов, заменив их трансбордерами. В особенности целесообразны трансбордеры при пересечении судоходных рек с высоким подмостовым габаритом.
Наиболее дешевым типом трансбордера является подвесной, в котором путем для тележки служат канаты.
Однако известные до сих пор подвесные трансбордеры обладают крупным недостатком, свойственным вообще подвесным устройствам, - высокой мощностью приводного двигателя. Груз, движущийся по канату, который можно рассматривать как гибкую нить, описывает траекторию, близкую к параболе (при постоянном натяжении) или эллипсу (при мертво закрепленных концах каната). Вследствие этого при близком подходе к опоре резко возрастает тяговое усилие, а значит и потребная мощность привода.
Большая мощность приводного двигателя, получающаяся таким образом (порядка 200 кв при скорости в 5 м/сек), в значительной мере ограничивает область применения подвесных трансбордеров. Установка их вдали от крупных источников электроэнергии требует сооружения в каждом случае специальной силовой станции. Между тем, такие трансбордеры чаще всего должны ставиться в районах, слабо развитых в промышленном отношении, на дорогах местного значения с ограниченным грузооборотом.
Таким образом, весьма желательно по возможности снизить мощность приводного двигателя.
При более детальном рассмотрении схемы подвесного трансбордера можно видеть, что конечные точки его каната находятся на одинаковом уровне. Практически при пересечении рек на равнинах это наиболее частый случай.
Для того, чтобы снизить потребную мощность, необходимо избежать подъема и затем опускания тележки при передвижении, т.е. нужно добиться, чтобы движение тележки осуществлялось не по параболе или эллипсу, а по горизонтальной прямой.
В предлагаемом устройстве для этого при передвижении тележки непрерывно меняется длина несущего каната таким образом, что провес остается постоянным, причем изменение длины каната может производиться полиспастом или винтом, а передвижение тележки и опускание (или подтяжка) несущего каната производятся от одного привода. При такой системе, при движении тележки от середины пролета к опоре, натяжение тягового каната непрерывно возрастает. В то же время происходит удлинение несущего каната, и натяжение его непрерывно уменьшается.
При движении тележки от опоры тяговое усилие падает, несущий канат подтягивается, и натяжение в нем возрастает.
При определенных соотношениях между величинами натяжений, скоростью передвижения тележки и скоростью удлинения (укорочения) несущего каната можно добиться того, чтобы движение тележки все время совершалось по горизонтали без затраты энергии на подъем тележки.
Согласно изобретению, для управления приводом лебедки, с целью такого изменения длины несущего каната, применен переключатель, приводимый в действие от привода лебедки тягового каната, причем он осуществлен в виде винтового шпинделя с переставными по его нарезке контактами, управляющими посредством электромагнитных муфт лебедкой для изменения длины несущего каната, а в самой лебедке для изменения длины несущего каната применены два барабана, попеременно включаемые от общего привода и наматывающие на себя концы вспомогательного каната, перекинутого через блок (или полиспаст), укрепленный на несущем канате.
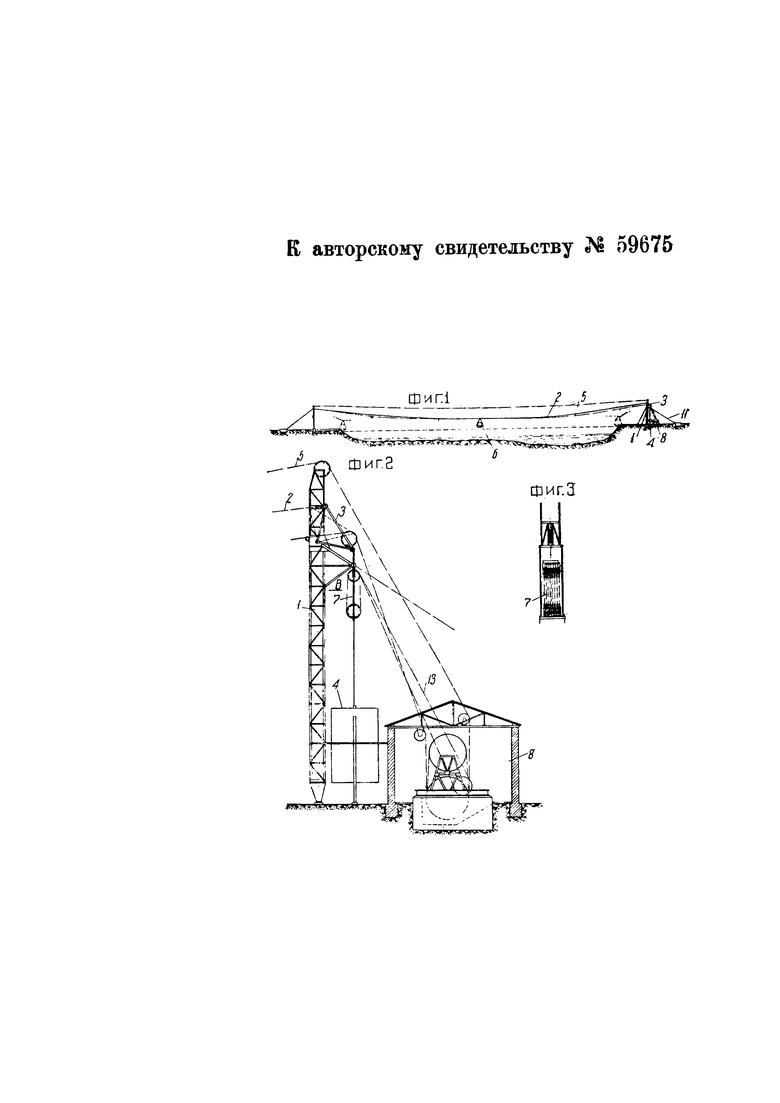
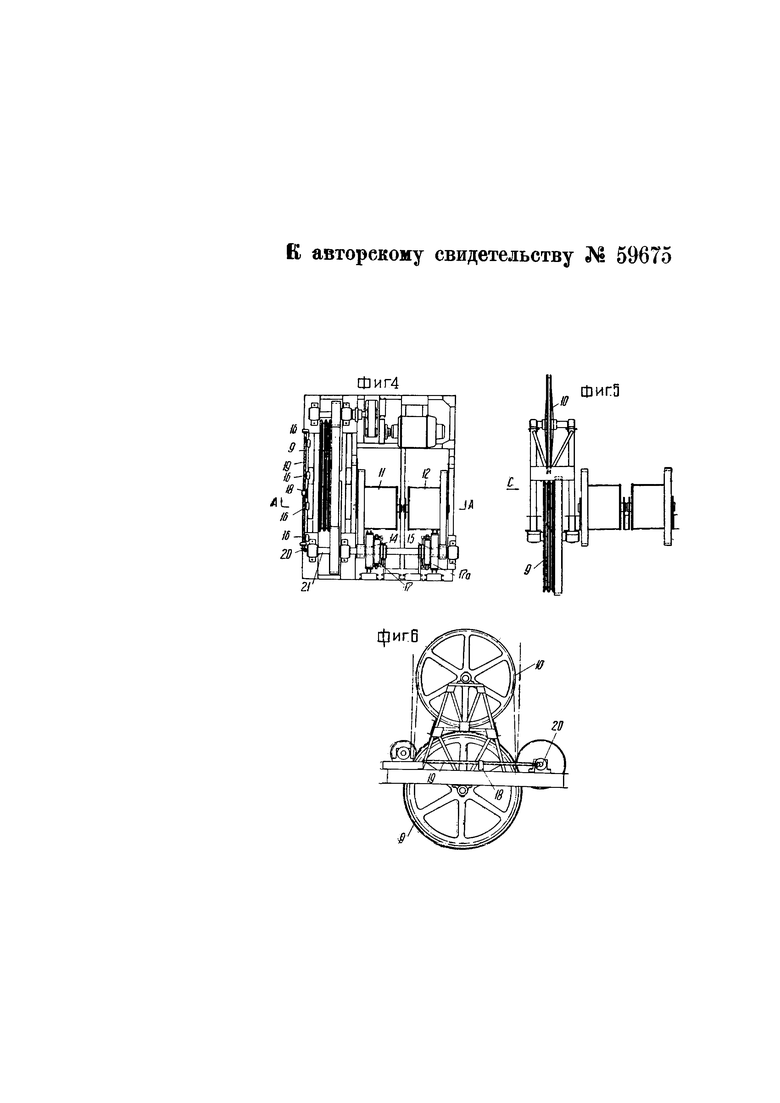
На чертеже фиг. 1 показывает общий вид трансбордера в форме кабельного крана; фиг. 2 - одну из мачт кабельного крана; фиг. 3 - вид блока-полиспаста для натяжения и ослабления несущего каната, если смотреть на него по стрелке В фиг. 2; фиг. 4 - вид в плане лебедки со всем оборудованием; фиг. 5 - разрез по АА фиг. 4; фиг. 6 - вид по стрелке С фиг. 5.
Кран состоит из двух мачт 1 (фиг. 1 и 2), между которыми натянуты два параллельных несущих каната 2.
С одной стороны канаты 2 укрепляются на балансире, благодаря чему натяжения в них автоматически выравниваются, с другой стороны - на шарнирном устройстве 3, на конце которого подвешен противовес 4.
По несущим канатам передвигается тяговым канатом 5 тележка 6 (фиг. 1).
Подтягивание несущего каната при движении тележки к середине пролета производится под действием противовеса 4.
В случае обрыва каната полиспаста противовес 4 стремится опуститься вниз, благодаря чему несущие канаты 2 подымаются вверх до тех пор, пока не наступит равновесие между натяжением несущих канатов и грузом противовеса.
Благодаря этому обрыв полиспастного каната никакой опасности для грузов и пассажиров, находящихся в тележке, не представляет.
Тележка 6 имеет обычное устройство с тем лишь отличием, что тормоз, действующий при обрыве тягового каната 5, ставится не на специальном тормозном канате, а на несущем.
Такой тормоз должен действовать вполне надежно, так как тележка ходит только в одном пролете, не проходя по башмакам. Благодаря этому тормозное устройство может охватить несущий канат со всех сторон, что обеспечивает полную надежность торможения.
В описываемой форме выполнения, принято, что тележка 6 не подъезжает к опоре ближе, чем на 0,1 пролета. Это вызвано тем, что при более близком подходе резко возрастает ход полиспаста и натяжение тягового каната. Кроме того, в этом случае значительно упрощается подъезд к тележке гужевого и автотранспорта и отпадает необходимость в выезде тележки задним ходом.
За опорой 1, на которой висит противовес 4, в машинном помещении 8 установлена приводная лебедка (фиг. 4-6), заключающая в себе двухжелобчатый шкив 9 с контршкивом 10, приводящими в движение тяговый канат 5, и два барабана 11 и 12 для полиспастного каната 13. Связь между приводным шкивом 9 и барабанами 11, 12 осуществляется зубчатыми передачами и муфтами.
При вращении барабана 11 производится подтяжка полиспаста 7, а при вращении барабана 12 - разматывание каната полиспаста, при движении же тележки в обратном направлении и реверсировании в связи с этим привода роли барабанов меняются.
Включение каждого из барабанов 11, 12 лебедки, производящего натяжение или ослабление полиспастного каната 13 и тем самым изменение длины несущего каната 2, управляется переключателем, приводимым в действие от привода для тягового каната 5.
Каждый барабан сопряжен с ведущим валом 21 посредством отдельной зубчатой пары, в каждой из которых ведущая шестерня свободно насажена на вал 21, а для сцепления их с валом применены электромагнитные муфты сцепления 17, 17а, управляемые, как и отдельные для барабанов тормоза 14, 15, автоматическим переключателем. Последний заключает в себе концевые выключатели 16, взаимодействующие с контактами ползуна 18, передвигающегося по винтовой нарезке шпинделя 19, приводимого во вращение через коническую передачу 20 от вала 21.
Эти концевые выключатели расположены по длине винтового шпинделя таким образом, что при положении тележки 6 в определенных пунктах пролета муфты 17, 17а и тормоза 14, 15 включаются одни вместо других; при этом одновременно с выключением каждой из муфт вступает в действие соответствующий ленточный тормоз.
При пуске начинает вращаться приводной шкив 9 тягового каната и один из барабанов 11, 12, разматывающий канат 13 полиспаста 7. При этом несущий канат 2 вследствие ослабления полиспаста 7 постепенно подтягивается под действием противовеса 4. После прохода тележкой 6 пути, равного 0,15 длины пролета, барабаны отключаются от приводного вала 21, и прекращается подтяжка каната 2. На протяжении дальнейших 0,5 пути оба барабана 11, 12 остаются выключенными, а длина несущего каната 2 остается постоянной.
На протяжении остальных 0,15 пути работает второй барабан и производит путем подтяжки полиспаста 7 подъем противовеса 4 и тем самым удлинение несущего каната 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАБЕЛЬНЫЙ КРАН | 1998 |
|
RU2208571C2 |
| КАБЕЛЬНЫЙ КРАНf, . ,'.-.;-..л vrVMH!^ V» п'1;.,! :1П i siU" i.-i'iSii» ii.- iii^-'--, r-< -!;' ~ '/-'"^'Тг''Д iLJ l!,;jl. '^.-^ • '-( ''^I | 1973 |
|
SU371159A1 |
| Грузоподъёмный механизм (варианты) | 2023 |
|
RU2809870C1 |
| Кабельный кран | 1987 |
|
SU1532530A1 |
| Сдвоенный кабельный кран | 1985 |
|
SU1301769A1 |
| Кабельный кран | 1988 |
|
SU1558855A1 |
| Сдвоенный кабельный кран | 1982 |
|
SU1057403A2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ КРЕПЛЕНИЯ ОПТИЧЕСКОГО КАБЕЛЯ НА ТРОСЕ ЭЛЕКТРИЧЕСКОЙ ВОЗДУШНОЙ ЛИНИИ | 1997 |
|
RU2171486C2 |
| Подвески (рейтеры) для поддержания тяговых и грузового канатов в кабельных кранах | 1931 |
|
SU38285A1 |
| Грузоподъемное устройство | 1973 |
|
SU527371A1 |
1. Кабельный кран с лебедкой для изменения длины несущего каната и с лебедкой для перемещения тележки помощью тягового каната, отличающийся тем, что, с целью управления приводом лебедки для изменения длины несущего каната, применен переключатель, приводимый в действие от привода лебедки тягового каната.
2. Форма выполнения кабельного крана по п. 1, отличающаяся тем, что переключатель осуществлен в виде винтового шпинделя с переставными по его нарезке контактами, управляющими посредством электромагнитных муфт лебедкой для изменения длины несущего каната.
3. Форма выполнения кабельного крана по п. 2, отличающаяся тем, что в лебедке для изменения длины несущего каната применены два барабана 11 и 12, попеременно включаемые от общего привода и наматывающие на себя концы вспомогательного каната, перекинутого через блок, укрепленный на несущем канате.
