(54) УСТРОЙСТВ© ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения коэффициентов передаточных функций систем регулирования | 1975 |
|
SU696416A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И ЗАДАТЧИК ПРОБНЫХ СИГНАЛОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2131139C1 |
| Самонастраивающаяся система | 1980 |
|
SU928302A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| Пневматический регулятор с переменной структурой | 1976 |
|
SU640254A1 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |
Изобретение относится к автоматическому управлению и измерительной технике и предназначено для экспериментального определения параметров линейных систем автоматического регулирования.
Известны устройства для определения передаточных функций линейных систем, содержащие генератор пробных сигналов, выход которого через подстраиваемую модель и через объект регулирования соединен с элементом сравнения, выход которого соединен со входами измерителя рассогласования, и четыре интегратора 1, 2.
Из известных устройств наиболее близким по технической сущности является устройство для определения коэффипиентов передаточных функпий, содержащее генератор пробных сигналов, выход которого через подстраиваемую модель и через объект регулирования соединен с соответствующими входами нервого элемента сравнения, выход которого соединен со входами измерителя рассогласования, и четыре интегратора 3.
Однако известное устройство характеризует ся недостаточной точностью определения коэффициентов передаточных функций линейных. сист(м автоматического управления.
Це;1ью изобретения является повышение точ ности устр{н сгва.
1ля этого в устройстве установлены блох формирования временных интервалов, ключи и второй элемент сравнения, причем выход первого элемента сравнения через ;ервый и второй ключи и первый интегратор соединен с первым входом второго элемегна сраннения. через третий и четвертый ключи и второй интегратор - с вторым входом второго элемента сравнения. чор(з пятый и н;естой к.п|Очм и третий интегратор - с третьи.м входом второго элеме}гга сравнения, через седь.1ой и восьмой ключи и четвертый интегратор - с входом второго элемента сравнения, yripaii.i).o щие входы к.дючей соединены с выходами ояока формирования вре.менных интервалов.
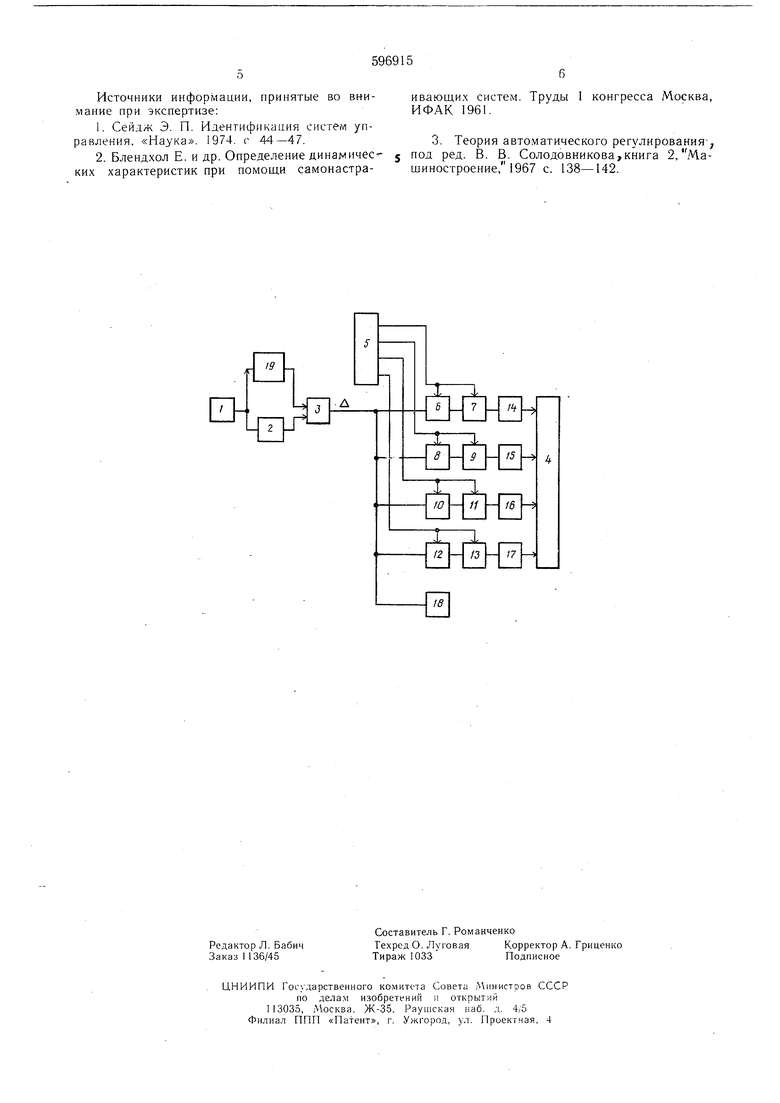
На чертеже приведена структурная электрическая схе.ма устройства для определения Коэффипиентов передаточнь(х функпий.
Оно содержит генератор пробных сигналов , подстраиваемую .модель 2, первый и второй элементы сравнения 3 и 4 блок формирования вре.менных интервалов 5, ключи 6-13, интеграторы 14-17, из.меритель рассогласования IS. объект регулирования 19. Устройство позволяет определять коэффициенты передаточной функции W (р) следующего вида: р} . .,- +с.,р Устройство работает следующим образом. .Сначала определяются коэффициенты при свободном члене , затем при первой производ-. ной и так далее до коэффициента при К производной. При определении а подключают к модели усилительное звено. Подают на вход системы и модели ступенчатое воздействие и в установившемся режиме, изменяя коэффициент усиления модели, добиваются пулевых показаный на выходе из.мерителя рассогласования 18. Затем приступают к определениюа(,. Параллельно исследуемой системе подключают усилительное звено с коэффициентом усиления, определенным в предыдущем случае. Запускают генератор 1 и одновременно подают линейно растущий сигнал на вход исследуе.ой системы и модели 2; Сигналы с выхода объекта 19 систе.мы и модели 2 подаются на элемент сравнения 3. В элементе сравнения 3 выделяется разность между выходным сигналом модели сисгемы X 5 ( Л f, а затем через замыкаюшие ключи 6, 8, 10, 12 и размыкающие ключи 7, 9, 11, 13 сигнал разности подается на входы интеграторов 14-17. Формирователь временпых интервалов 5 передним фронтом импульса первого выхода через замыкающий ключ 6 включает интегратор 14, а задним фронтом этого же импу.чьса через размыкающий ключ 7 отключает интегратор 14. В следующий момент в.оемени по переднему фронту импульса со второго выхода формирователя временных импульсов через замыкающий ключ 8 включится интегратор 15 который произведет интегрирование разности А за то время i. Далее включатся интеграторы 16 и 17. Результаты интегрирования сравниваются во втором элементе сравнения 4. Если свободные колебания в системе затухнут, то показания последующих интеграторов будут практически одинаковы. В это.м случае, разделив результат интегрирования на величину времени интегрирования Дг, определяют Л. Коэффициент при первой производной определяется согласно выражению«.-, разность .между выходным сигналом системы и .модели при подаче линейлинейно растущего сигнала; ui-коэффициент при линейно растущем, сигнале. Затем приступают к определению коэффициента а2- Параллельно исследуемой системе подключают .модель со следующе.й передаточной функцией М(Р) Для определения коэффициента а2 на вход системы и модели поступает квадратично растущий сигнал Xjjj c)Ut .Коэффициент aj определяется как где АО - разность выходных сигналов системы и модели при подаче на вход воздействия Хц U2t U2-коэффициент при квадратично растущем члене. После определения коэффициентов при второй производной корректируют модель, а затем на вход исследуемой системы и модели подают кубично растущий сигнал х dt и определяют коэффициент при третьей производной. Таким образом, подавая все более сложные сигналы из последовательности время-степенного ряда, определяются все неизвестные коэффициенты передаточной функции исследуе.мой системы. Коэффициент при К производной определяется по формуле: где Д -разность выходного сигнала системы и модели при подаче на и.х входы сигнала. а -коэффициент при соответствующем сигнале из время-степенного ряда. Формула изобретения Устройство для определения коэффициентов передаточных функций, содержащее генератор пробных сигналов, выход которого через подстраиваемую модель и через объект регулирования соединен с соответствующими входами первого эле.мента сравнения, выход которого соединен со входами измерителя рассогласования, и четыре интегратора, отличающиеся тем, что, с целью повыщения точности, оно содержит блок формирования временных интервалов, ключи и второй элемент сравнения, причем выход первого элемент сравнения через первый и второй ключи и первый интегратор соединен с первым входом второго элемента сравнения, через третий и четвертый ключи и второй интегратор - с вторы.м входом второго элемента сравнения, через пятый и щестой ключи и третий интегратор - с третьим входом второго элемента сравнения, через седьмой и восьмого ключи и четвертый интегратор - с четвертым входом второго элемента сравнения, управляющие входы ключей соединены с выходами блока формирования временных интер.валов.
Источники информации, принятые во внимание при экспертизе:
