одном из его частых случаев, а именно линии зацепления в приборах для комплекс ного однопрофильного контроля, в качесгве настроечного элемента используют зуб номинальной исходной рейки, вводят его в зацепление с измерительным элементом, регистрируют характеристику рассогласования их угловых поворотов в процессе обката и фиксируют точку перегиба этой характерис- тдки, соответствующую положению зцепления.
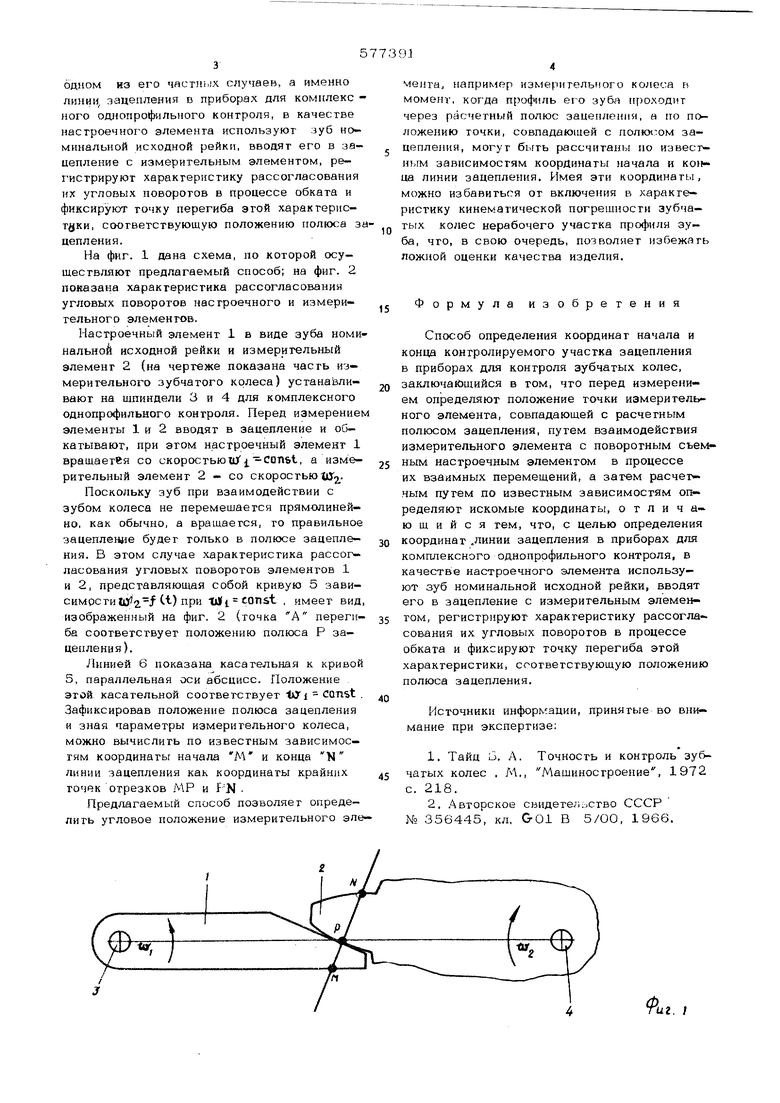
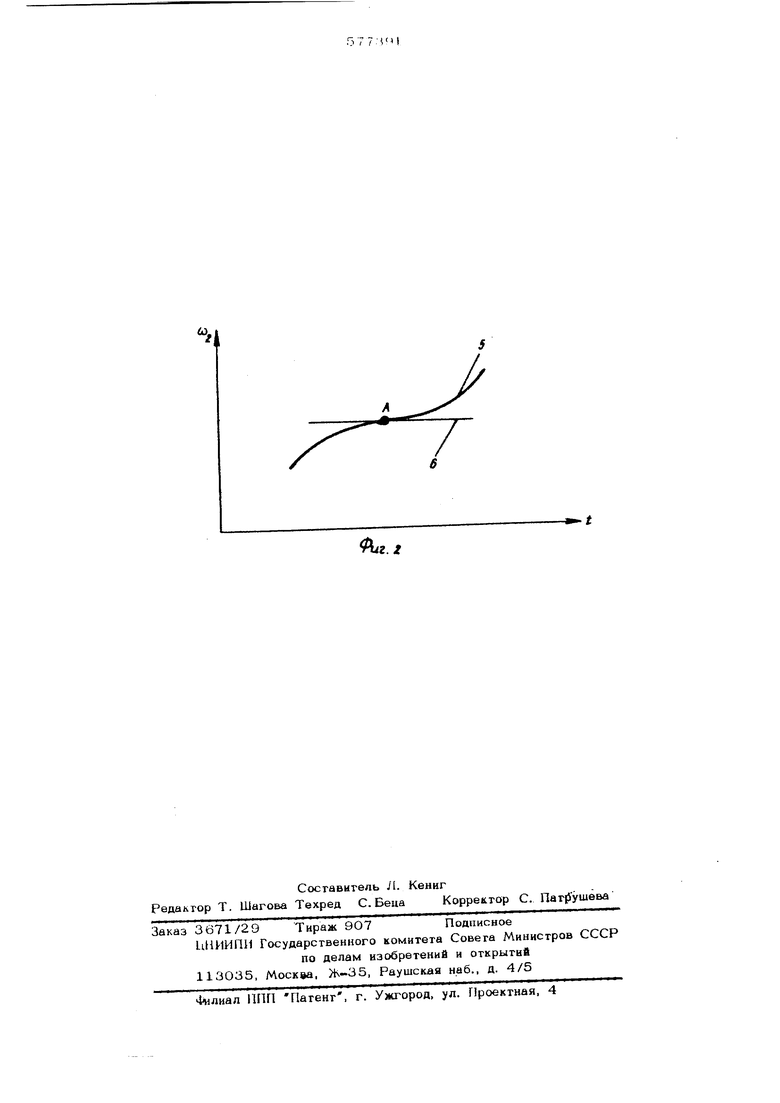
На фиг. 1 дана схема, по которой осуществляют предлагаемый способ; на фиг. 2 показана характеристика рассогласования угловых поворотов настроечного и измерительного элементов.
Настроечный элемент 1 в виде зуба номинальной исходной рейки и измерительный элемент 2 {на чертеже показана часть измерительного зубчатого колеса) устанавливают на шпиндели 3 и 4 для комплексного однопрофильного контроля. Перед измерением элементы 1 и 2 вводят в зацепление и обкатывают, при этом настроечный элемент 1 вращается со скороетьюи) -const, а измерительный элемент 2 - со скоростьюtoCgi.Поскольку зуб при взаимодействии с зубом колеса не перемешается прямолинейно, как обычно, а вращается, то правильное зацепление будет только в полюсе зацепления. В этом случае характеристика рассогласования угловых поворотов элементов 1 и 2, представляющая собой кривую 5 зависим рсти ) при ljjfi tonst , имеет вид, изображенный на фиг. 2 (точка А перегиба соответствует положению полюса Р зацепления).
Линией 6 показана касательная к кривой 5, параллельная оси абсцисс. Положение этой касательной соответствует lOi - Const . Зафиксировав положение полюса зацепления и зная параметры измерительного колеса, можно вычислить по известным зависимостям координаты начала М и конца К линии зацепления как координаты крайних точек отрезков .МР и FN .
Предлагаемый способ позволяет определить угловое положение измерительного элемента, например измерительного колеса в момент, когда профиль его зуба проходит через расчетный полюс зацепления, а по положению точки, совпадающей с полю1ом зацепления, могут быть рассчитаны по известным зависимостям координаты начала и конца линии зацепления. Имея эти координаты, можно избавиться от включения в характеристику кинематической погрешности эубчатых колес нерабочего участка профиля зуба, что, в свою очередь, позволяет избежать ложной оценки качества изделия.
Формула изобретения
Способ определения координат начала и конца контролируемого участка зацепления в приборах для контроля зубчатых колес,
заключайзщийся в том, что перед измерением определяют положение точки измерительного элемента, совпадаюш.ей с расчетным полюсом зацепления, путем взаимодействия измерительного элемента с поворотным съемным настроечным элементом в процессе их взаимных перемещений, а затем расчетным путем по известным зависимостям определяют искомые координаты, отличающийся тем, что, с целью определения
координат .линии зацепления в приборах для комплексного однопрофильного контроля, в качестве настроечного элемента используют зуб номинальной исходной рейки, вводят его в зацепление с измерительным элементом, регистрируют характеристику рассогласования их угловых поворотов в процессе обката и фиксируют точку перегиба этой характеристики, соответствующую положению полюса зацепления.
Источники информации, принятые во внимание при экспертизе:
1.Тайц ). А. Точность и контроль зубчатых колес , М., Машиностроение, 1972
с. 218.
2.Авторское свидетельство СССР № 356445, кл. &01 В 5/00, 1966.
.
иг. ;
Z.Z
