1
Изобретение относится к области автоматического управления производственными механизмами и может быть использовано для автоматизации поз цнонных перемещений механизмов с приводами по системе Г-Д или ТП-Д и обладаюидих значительными моментами инерцнн, изменяющимися в процессе работы в определенных пределах.
Известно устройство управления приводом поворота одноковщового экскаватора по системе генератор-двигатель с возбудителем генератора по основному авт. св. JNa 442271, включаюцдее импульсный датчик величины и направления перемещения, к соответствующим выходам которого подключены цифроаналоговый датчик скорости и блок програм.много управления, выходы каждого из которых соединены с подключенным к возбудителю генератора блоком формирования закона управления, к которому также иодсоединены выходы датчиков тока и его первой производной по времени, включенных в якорную цепь привода, и выход датчика второй производиой, соединенного с датчиком первой производной.
Однако такое устройство не позволяет использовать предельные величины ускорений в режимах разгона и торможения, что существенно увеличивает длительность процесса позиционных перемещений и, как следствие.
снижает производительность экскаватора. Объяеияется это тем, что в режимах разгона и торможения иодде; кизается иосчоянная велнчииа вращающего момента электродвигателей, в то время как момент инерции и момент сил трения новоротной платформы NioryT суи1,ествен1ю отлнчаться друг от друга в указанных рамках. Это и приводит, в конечном итоге, к различию величин ускорений
в режимах разгона и .
Целью изобретения является повьпиение производительное экскаватора путем реализации допустимых зиаченип }скорения в периоды разгона и торможения поворотной
платформы.
Это достигается тем, что предлагаемое ycTpoiicTBo уиравления приводом поворота одноковщового экскаватора дополнительно снабжено блоком регулирования ускорени/i
иривода, выполненным в виде носледовательно соединенных цифро-аналогового датчика скорен я и нелинейного элеменга и подключенным входами к цифро-аналоговому датчику CKOpocTii, а выходом - к возбудителю генератора.
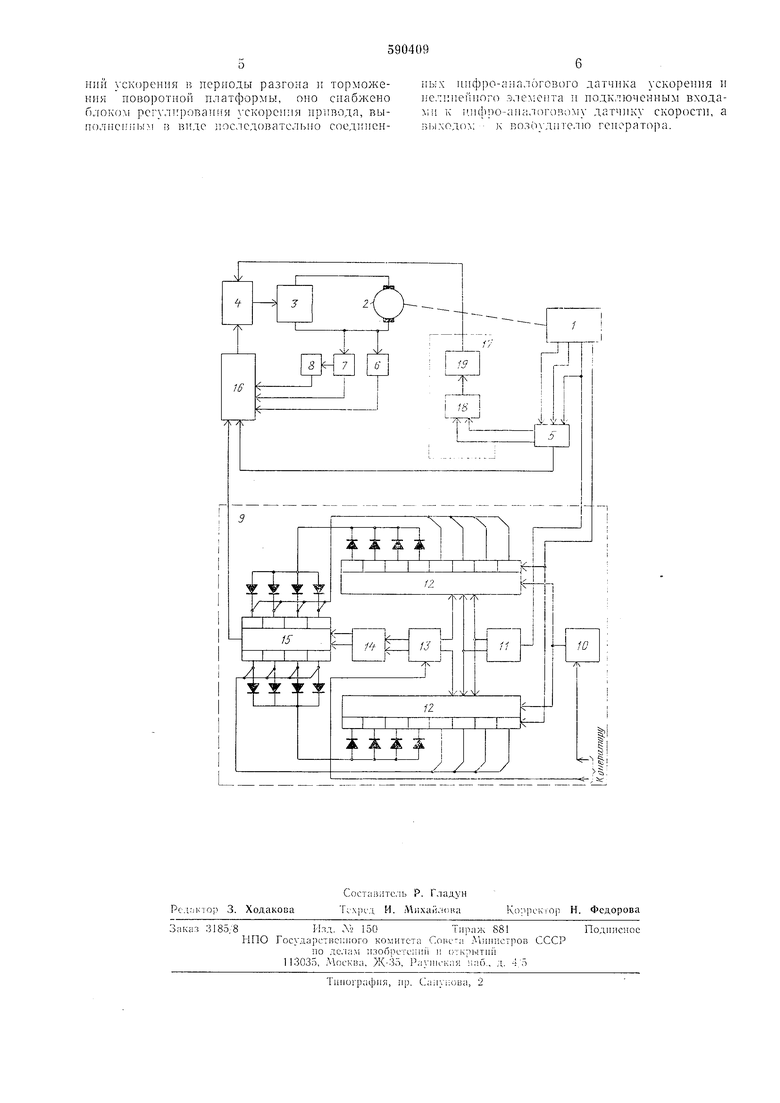
Такой принцип построения устройства позволяет поддерживать значение ускорепия на постоянном иредельиом уровне в периоды разгона и торможения независимо от влияния моментов сил трения и моментов инерЦН11, что сокращает длительность позицион ных исремещеинй и увеличивает производи тельность экскаватора. На чертеже прсдетавлепа блок-е.хема пред ,1агаеЛЬ)|-о устройстиа у)1}авлеппя (;м iioijLpoIa одпок(ЛЛТ1ово1о экека1 атора. 13 качестве пе1)вич11ых датчиков .ч устройстве управления приводом поворота одпоковиювого экекаватора применены импулосньш датчик 1 величины н панравлення перемещения, входом соедннеппы с валом Д1знгателя 2, нодключеииого к нреобразователю о с енстемой унравлення 4; цифро-аналоговый датчик скорости о, входами соедннеиный с ил1иульсн.ым датчиком 1, иелнчнны и ианравлеиия перементення; датчик тока 6, датчик нервой производной тока но времени 7, входами еоедииеиные с якорной ценью привода, U д;1тчик второй производной тока по времени. 8, входом соединенный с датчиком первой )изводной тока но времени 7. Д.тя ввода U х)анеппя заданной оператором программы лс:рсмсп;епий п определения текущего зпаче111 я )ассо1лаеова1П1Я меячду заданным и денствптельныл неремещеннем служит блок программного управлеппя У, входами соедипеиныи с оиератором и имиульсным дагчнком 1 величины и иаправлепия перемеи еппя. Ьлок iipoipaMMHoro ч)равленпя 9 состоит нз узла 1и нрограммного смещения, триггера И, рс1}е)енвпых счетчнков 12, узла задания 1аправлсппя перемещения 13, триггера 14 и лреобразователя код-наиряжение (ПКН Д.тя выработки алгоритма уиравлеппя предпазпачеи блок формирования закона управления 16, входами соеди 1еииый с цифроаиа.тоговым датчиком екоростп 5, блоком программного у11равлсч1пя У, датчиком тока и, ;,атчпком первой производной тока по B,ieMenu 7 и датчикол второй производной тока lio времепи 8, причем выход блока формироваиня 3;iKoua унравлеиия 16 соединен с входом системы управлеиия 4 преобразователем. Блок регулирования ускорения 17 служнт ноддержаиня ускорения на ностоянном н 1едсльном уровне и состоит из последовательпо соедипенных цифро-аналогового датЧ11ка ускорения 18 li нелинейпого элемента 19. Входы блока регулирования ускорения нодк.т1очены к цнфро-аиалоговому датчику скорости 5, а выход соединен с системой управлеппя 4 преобразователем. Работа ycTpofieTBa происходит сле;1,у1ощнм об1;азом. Иериоиачальпый ввод задания осуществляется оператором при помощ.н перемещения поворсугиой платформы экскаватора па необходимый угол при ручном управленнн и подаче в одни из реверсивных счетчиков 12 через узел 10 сигнала программного смещення. Ирн перементеиии нлатформы нмпульеный датчик и направлсппя неремендевыдает импульеы, колнчеетво которых ио величнлк перемещении. К 1 лодключе Ы счетные I5i,выходам датчик; ходы двух идеи нчных реверсивных счетчнков 12. В зав снллКтн от нанравления iu pe13 счетчиков работает i jie/KHмси1, ОЛИ и ;аг1иеь), а - вычнтання ie ел(1:-:.;сння (eHiicijiBaiiiic i. (иихро11и :() 1 омл; лацн10 ечетчпко; 12 па 3anneij н.ти с 1еьп а11ие производит 11 ;5 завиенмое1 ; знака ск()|К)сти ново)отHoii н,татформы экскаватора. В счетчике 12, работает при данном панравлеипи в заппс). 1роисходит счет п запоминаннс количества нмихльсов. ностуnaioHuix от импульсного датчика I. и алгсбра 1ческое еуммироваиие их с с 1гналом ирог1)ал много смеи е11ия. Па этом процесс ввода iiporpaMMbi за)аичивается. По кo iaндe операгораДк перемещеине в авюмятическом ре/кнме в заданную еторо;1 задания пап1)авле11ия }1еремещеппя 3 3()дпт устаповку соот;зетс11 тоще1о счспиеходпое состояние и подключает о к др}тому счетчикх, с которого списывается ип(Ьо|)мация. П|М1 перемеи ении э чскаватора импульсы с датчика 1 производят списьп ан1:е ии()()рмании со ечетч:П а, подключеипого к Г1КН 1о. п записываются в счетчик. Алгоритм у;|рав,-1еипя реализуется в блоке формирования закоиа управления 16. па вход которого поступают с рассчитанными коэффицисптамп веса сигналы от датчиков скорости о, тока 6, uepBoii н второй производных тока по времепи 7, и 8 и сигнал, пронорцпоиа.тьный неремеи1ення пз бло программного управлеппя 9. Уснленный оидтал подается на вход С1 стсмы управлення 4 преобразователем. Г1()Д,дер}кан11С уекооеинй в периоды разгона и торможения на иретельном ровнс осун1сетвляется блоком )сгул.1)(зваиия ycKopeiU 17, в }чОТ()Х)М тскупи:е 311аченне ускорения, поступающего от п,ифро-анало ового датчпка уекорс1 пя 18, сравннпаетея е предельно допустимым па пелпнсйиом элемсчгге 19. Выход блока регулирования екорення подключен к в.ходу системы управления 4 преобразователем. Такпм образом, схема работы 1 редлагаемого -етроГ1ства обеепечивает воепропзведен ;е задаииой програкнтв на неременхенне, храпеие 5 иформаиип с задаипой программой, а гак;ке поддерживает ткорсппе в пер1К)ды разоиа 1; торможения иа иоетояпном предельном ф()вне 11езаВ1;симо с-т влияния моментов сил рснля и момеигов нпе;)и, поворотпсн n.iaTормы. Прпмеиеппе подобиой енетемы позвояет увеличить производ1ггельиость одиоков1ов;)го экскаватора на 6-8%. I) м у л а и 3 о б р е т с и п я ycTjuyiCTBO управлеппя приводом поворота )дпок(.)вн1()пого 3KCKai5aT(jpa но авт. св. Ь 142271, о т .т н ч а ю щ е е с я тем, что, с 1.елыо повыии} 1ия пронзводптельностп экскаагора путем пе;1лизании донустнмых значсо
ИНН скореи11я 15 периоды разгона и торможения поворотной платформы, оно снабжено Г) регулирования уекорения привода, выno/iHeii b в внде ноеледователыю еоедипен6
ных ннфро-аналогового датчнка ускорення н не.лшениого элемента н нодключенным входа :П к п.нсЬро-апалоговому датч)1ку екороетн, а 1 1ходол: - к возо днтел1О генератора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом одноковшового экскаватора | 1972 |
|
SU442271A1 |
| Аналого-цифровой преобразователь | 1973 |
|
SU445982A1 |
| Устройство управления приводом одноковшевого экскаватора | 1974 |
|
SU600263A2 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU613037A1 |
| Устройство для управления поворотом одноковшового экскаватора | 1977 |
|
SU682615A1 |
| Способ управления электроприводами одноковшового экскаватора | 1985 |
|
SU1294933A1 |
| Способ управления электроприводом поворота экскаватора и устройство для его осуществления | 1986 |
|
SU1416626A1 |
| Устройство для программного управления | 1984 |
|
SU1229730A1 |
| СПОСОБ ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА С ЛЮФТОМ В КИНЕМАТИЧЕСКОЙПЕРЕДАЧЕ | 1969 |
|
SU436424A1 |
