Изобретение относится к подъемно-транспортному машиностроению и может быть использовано для загрузки цилиндрических изделий, например што ков гидроцилиндров, на автоматическу линию хромирования. Известен кантователь изделий, содержащий вертикальные опорные стойки, на которых смонтирована с возможностью поворота рама, снабженная захватными органами, механизмы подъема и поворота, взаимодействующие с рамой l. Недостатком известного кантовател является отсутствие возможности наве шивания изделий на транспортную подвеску из-за нахождения ее на высокорасположенном уровне для транспортирования по автоматической линии. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является кантовател для загрузки и разгрузки пзтооператора автоматической линии, включающ опорные стойки с подвижными вертикальными штангами, поворотную раму с установочными призмами, связанную через рычаги с силовыми цилиндрами, и подвески с захватами 2. Однако расположение грузонесущего поворотного органа на раздвижной стойке не позволяет производить съем транспортной подвески с изделиями с автооператора автоматической линии. Кроме того, отсутствует многоместное устройство для базирования изделий, обеспечивающее синхронную перенешадку опорных базовых элементов с сохранением совпадения осей изделий с осями соединительных устройств на транспортной подвеске. Цель изобретения - повышение, производительности кантователя путем уменьшения времени на крепление изделий. Поставленная цель достигается тем, что подвески с захватами установлены с возможностью отсоединения от автооператора, а вертикальные подвижные штанги снабжены траверсой для установки подвески, при этом поворотная рама выполнена с направляющими, а каждая установочная призма выполнена из двух полупризм, размещенных в направляющих с возможностью перемещения, причем полупризмз связаны между собой через одну посредством шарнирных тяг, а кргЛние полупризмл имеют регчлировочныйвинт с правой и левой нарезкой резьбы.
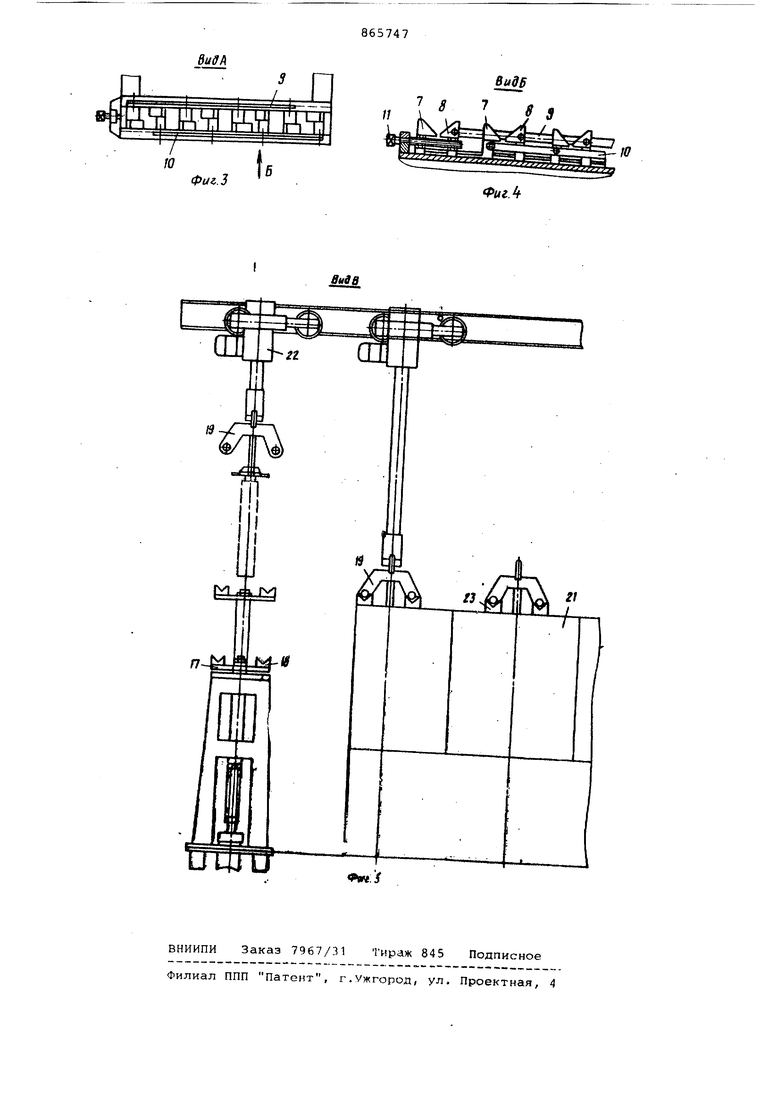
На фиг. 1 изображен предлагаемый кантователь, общий вид; на фиг. 2 го же, вид спереди; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - вид Б - на фиг. 3; на фиг. 5 - вид В - на фиг. 2
Кантователь имеет опорные стойки 1, на которых смонтирована на опорах 2 вращения рама 3. На раме 3 в направля:(хцих 4 установлены опорные призмл 5 с рычагами 6, каждая из котЬрых состоит из двух полупризм 7 и 8, соединенных последовательно через одну при помощи шарниров тягами 9 и 10. В первой паре полупризм 7 и 8 установлен регулировочный винт 11 с правой и левой нарезкой резьбы.
Рама 3 при помощи двух рычагов 12 соединена со штоками силовых цилиндров 13, установленных в опорных стойках 1. В верхн-ей части опорных стоек 1 в направляющих втулках 14 установлены две штанги 15, нижние концы которых через шаровые опоры соединены с двумя вертикальными силовыми цилиндрами 16, установленными в опорных стойках 1.
На верхних концах штанг 15 закреплена траверса 17, на которой расположены устройства 18 для установки на них транспортной подвески 19 с заватами 20 для навешивания изделий. Кантователь обслуживает автоматическую линию 21, имеющую автооператор 22 и устройства 23 для установки транспортной подвески 19, аналогичные устройствам 18 кантователя.
Кантователь работает следующим образом.
При нахождении траверсы 17 в крайнем, верхнем положении на устройстве 18 автооператором 22 автоматической линии 21 устанавливается транспортная подвеска 19.
Силовыми цилиндрами 16 траверса 17 опускается в крайнее нижнее положение.
На раму 3, находящуюся в горизонтальном положении, в призмл 5 укладываются изделия и Фиксируются поворотными рычагами б при помощи силовых цилиндров (не показаны). Силовыми цилиндрами 13 через рычаги 12 рама 3 с установленными изделиями поворачивается в вертикальное положение.
Захватами 20 изделия соединяются с транспортной подвеской 19, после чего рычаги 6 отводятся в сторону.
Силовыми цилиндрами 16 траверса 17 с транспортной подвеской 19, на которой закреплены изделия, поднимается в крайнее верхнее положение в зону захода автооператора 22 автоматической линии 21, откуда она отправляется по технологическим позициям линии, имеющей устройства 23 для установки транспортной подвески, аналогичные устройствам 18. е При поступлении на траверсу транспортной подвески с отхромированными изделиями разгрузка их осуществляется в обратном порядке.
Далее цикл загрузки подвески очед редными изделиями повторяется.
Переналадка призм 5 кантователя на работу с изделиями другого диаметра осуществляется при помощи вращения регулировочного винта 11. При этом первая пара полупризм 7 и 8 при
5 помощи винта 11, а остальные - при помощи тяг 9 и 10, синхронно перемещаясь в направляющих 4 рамы 3, сходятся (или расходятся), сохраняя постоянство положения центров осей
0 изделий относительно центров осей захватов 20 подвески 19.
Применение предлагаемого кантователя позволяет повысить производительность и сократить время на крепление изделий.
Формула изобретения . Кантователь для загрузки и разгрузки автооператора автоматической линии, включающий опорные стойки с подвижными вертикальными шлангами, поворотную раму с установочными п измамй, связанную через рычаги с силовыми цилиндрами, и подвески с захватами, отличающийся тем, что, с целью повышения производительности кантователя путем уменьшения времени на крепление изделий,
0 псщвески с захватами установлены
с возможностью отсоединения от автооператора, а вертикальные подвижные штанги снабжены траверсой для установки подвески, при этом поворотная
e рама выполнена с направляющими, а каждая установочная призма выполнена из двух полупризм, размещенных в направляющих с возможностью перемещения, причём полуприЗмы связаны между собой через одну посредством шарнирных тяг, а крайние полупризмы имеют регулировочный винт с правой и левой нарезкой резьбы.
Источники информации, 5$ принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 575304, кл. В 65 G 67/48, 1975.
2.Авторское свидетельство СССР № 519373, кл. В 65 G 47/36, 1973
40 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Устройство для загрузки и разгрузки автооператора | 1986 |
|
SU1370033A1 |
| Кантователь | 1973 |
|
SU510285A1 |
| Стенд для сборки управляемого моста транспортного средства с независимой подвеской на поперечных рычагах | 1975 |
|
SU603552A1 |
| Вертикальный накопитель | 1980 |
|
SU943142A1 |
| Автоматическая линия | 1976 |
|
SU603562A1 |
| Поточная линия для сборки и сваркиМЕТАллОКОНСТРуКций | 1979 |
|
SU804314A1 |
| Автооператор | 1979 |
|
SU844218A1 |
| Линия для химического фрезерования крупногабаритных изделий | 1987 |
|
SU1497278A1 |
| Автооператор | 1969 |
|
SU344701A1 |

Видб
РигЛ
