Изобретение относится к области автомагнческогс управления и может быть применено в самонастраивающихся системах управления, а также в системах автоматической обработки информации и идентификации, .
Среди устройств для идентификации объектов управления наибольшее распространение получили устройства, использующие линейную, относительно конечного числа
фиксированных базисных) преобразователей, настраиваемую модель,
В устройствах подобного типа весовые коэффициенты при выходаХ:Преобразователе Г, реализующих известные базисные операторы, настраиваются с помощью цепей, каждая из которых содержит дискретный или непрерывный интегратор, в общем случае с переменным коэффициентом усиления. На входы интеграторов подключены устройства, формирующие сигналы, пропорциональные текущим (часто сглаженным при пилощи фильтров) значениям соответствующих компонент градиента квадрата рассогласования между вызсодами объекта и модели. Средний квадрат
рассогласования характеризует потери, возникающие аппроксимации объекта принятсЛ моделью f Ij и 2,. .
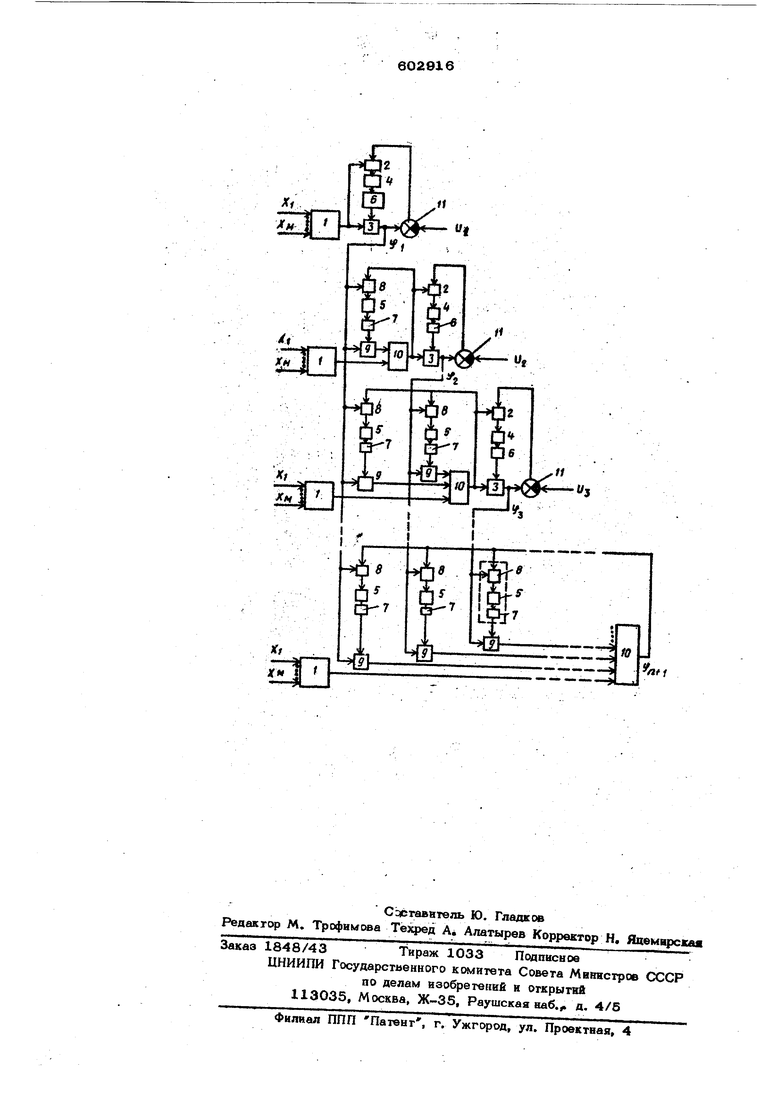
Наиболее близким по технической сущности к данному изобретению является мно гоканальное устройство для идентификации объекта управления, содержащее сумматор, блок сравнения и Irt каналов, каждый из которых содержит функциональный преобразователь и: последовательно соединенные первый умножитель, первый фильтр, первый интегратор и второй умножитель, причем выход функционального преобразователя первого канала соединен непосредственно и через второй умножитель и блок сравнения со входами первого умножителя 3J. .
В таком устройстве выходы функциональных преобразователей модели в общем случае неортогональны. При большом числе па- раметров это приво1 у1т к тому, что задача идентификации вырождается. Практически это означает, что минимизируемый функционал рассогласования в окрестности своей экстремальной точки становигся слабо Ьыпуклым. Учитывая, что устройстБа реализующив настройки, обпадаюг конечной нечувствительностью, точность оценки параметров модели будет невысоксй. Кроме того, так как Q случае неортогальнц выходов функцисжальньтх преобразователей аастройка параметров модели происходит не независимо друг от друга, то быстродействие устройства также может быть низ Отсутствие ортогональности cvicTewbi выходов базисных преобразователей приводит к низким быстродействию и точности уст ройства. Целью изобретения является повышение точности и быстродействия. Поставленная цель достигается тем, что в предлагаемом устройстве дополнительно установлены ( t +1)-ый функциональный преобразователь, в каждом канале, кроме первого и последнего, сумматор и блок сра нения, ({ -1) последовательно соединенные третий умножитель, второй фильтр, второй интегратор и четвертый умножитель, а в последнем канале ( { -l) последовательно соединенные третий умножитель, второй фильтр, второй интегратор и четвертый умножитель, причем в каждом канале выходы функционального преобразователя и четвертых умножителей через сумматор соединены со вторыми входами соответствующих jpeTbjpx умножителей, выход сумматора во всех каналах, за исключением последнего, соединен непосредственно и через соответствующий второй умножитель и блок сраа- нения со входами соответствующего первого умножителя, а первый вход блока сравнения каясдого канала соединен с первыми входами соответствующих третьего о и четве того умножителей последующих каналов. На чертеже показана блок-схема устройства. Устройство содержит функциональные преобразователи 1, первые умножители 2, вторые умножители 3i первые фильтры 4, вторые фильтры 5, первые интеграторы 6, вторые интеграторы 7, третьи умножители 8, четвертые умножители 9, сумматоры 10 блоки сравнения 11. В описании приняты следующие обозна чения: XI - входные сигналы, поступающие с объекта, ( - выходной сигнал вторых блоков умножения, С,(1 - выходной сигнал сумматора последнегв каналами - опорныйсигнал. Устройство работает следующим образо Функциональные преобразователи 1 пре разуют наблюдаемые координаты объекта образуя на своих выхоX j I 2 дах систему линейно независимых сигнало общем случае неортогональных и ненорированных. Сначала нормируется выходней сигнал ункционального преобразователя 1 первогоанала. Для этого выход функционального 1реобразователя 1 связан со входом умноителя 3 того же канала, на другом входе оторого формируется нормирующий множитель. Полученный таким образом сигнал ф, подается на вход блока сравнения, где происходит сравнение его с опорным сигналом. Выход блока сравнения связан с одним из входов умножителя 1 цепи настройки,, которая формирует на своем выходе нормирующий множитель. При этом минимизирует ся средний квадрат сигнала на выходе схемы сравнения. Удовяетворяющий этому условию сигнал ipj будет нормирован, т.е. его среднеквадратичное отклонение будет равно единице. Сигнал ф| является выходным сигналом первого канала. Полученный таким обра аом сигнал ф; затем подается на соответствующие входы третьего и четвертого умножителей всех последующих каналов. Во втором канале сигнал с выхода четвертого умножителя 9 поступает на вход сумматора 10, на другойвход которого.поступает сигнал с выхода функционального преобразователя 1 второго канала. Среднеквадратичное отклонение полученной суммы с помощью цепи настройки, формирующей на своем выходе множитель, зависящий от ф , минимизируется. При этом условии сигнал на выходе сумматора 1 второго канала становится ортогональным с выходным сигналом Ц), первого канала. Выходной сигнал сумматора 10 второго канала нормируется аналогично выходному сигналу функционального преобразователя 1 первого канала. Выходной сигнал ф второго умножителя 3 второго канала является выходным сигналом второго канала. Далее, полученные сигналы (pi и ф поступают на соответствующие входы третьих и четвертых умножителей 8,9 третьего канала. Выходные сигналы четвертых умножителей 9 поступают на входы сумматора 10 третьего канала, на один из входов которого подается также сигнал с выхода функционального преобразователя 1 того же канала. Выходной сигнал сумматора с помощью двух цепей настройки, связанных своими выходами со входами соответствующих умножителей третьего канала, ортогонализируется с ф, и ф,, и затем так же, как и ранее, нормируется. Таким образом, на выходе второго умножителя 3 тре- тьего канала формируется сигнал (р , который является выходным сигналом третьего канала. Сигналы I Фл Чй выходной сигнал функционального преобразователя 1 че вертого канала участвуют в формировании сигнала фд , ортогонального с Ci Фл .P. т.д., вплоть до сигнала ф,.,, Ортогонального с сигналами ф , ф ,..., . Сигнал ф. нет необходимости .нормировать. Он представл51ет собой рассогласо ванне , удовлетворяющее поставленнсИ1 цели, - средний квадрат , минимален: При этом, как видно на чертежа, выходы функцисжальных преобразователей 1 всех каналов участвуют в формир(ании . в линейной форме. Весовые коэффициенты каж дого из базисных преобразователей в этоЛ линейной форме легко подсчитываются по значениям коэффициентов, полученных на умножителях, участвующих в формировании сигналов ф J , ф2 .-. U + iПредлагаемое устройство позволяет по. высить точность и быстродействие идентиф кации объекта по сравнению с известным устройством З. Это повышение особенно значительно при большом числе параметров модели, когда выходы ее функциональных преобразователей существенно неортогональны. Кроме того, предлагаемое устройство имеет более широкие функциональные возможности поскольку, во-первых сформированные в нем сигналы Ц) могут быть использованы дл принятия решения о минимальном -теле преобразователей, необходимых для аппроксимации объекта с заданной точностью, и, во-вторых, появляется возможность ндентификации объектов, в которых разделение контролируемых сигналов на входные и выходные провести невозможно или нецелесообразно. Формула изобретения Многоканальное устройство для идентификации объекта упрааления, содержащее сумматор, блок сравнения и tt каналов, каждый из которых содержит функциональный Преобразователь и последовательно соединенные первый умножитель, первый фильтр, первый интегратор и второй умножитель, причем выход функционального преобразователя первого канала соединен вепосредственно и через второй умножител ь и блок сравнения со входами первого умно жятедя, отличающееся тем, что, с целью повышения точности устройствва в нем дополнительно установлены (к +1)-ный функциональный преобразователь, в каждом канале, кроме первого и последнего, сумматор и блсж сравнения, ( 4 -1) последовательно соединенные третий умножитель, второй фильтр, второй интегратор и .четвертый умножитель, а в последнем канале { i -l) последовательно соединенные третий умножитель, второй фильтр, второй интегратор и четвертый умножитель Ьричем в каждом канале выходы функционального преобраз с® ателя и четвертых умножителей через сумматор соединены со вторыми входами соответствующих третьих умножителей, выход сумматора во всех каналах, ,эа исключением последнего, соединен непосредственно и через соответствующий второй умножитель и блок сравне-ч ния со входами соответствующего первого умножителя, а первый вход блока сравнения каждого канала соединен с первыми входами соответствующих третьего и четвертого умножитеаюй последующих каналов. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 378802, кл. Q О5 В 13/О2, 1971. 2.Авторское свидетельство СССР Ne 429415, кл. (: ОБ Б 17/О2, 1972. 3.Теория непрерывных автоматических систем и вопросы идентификации , трудыШ Конгресса ИФАК, М., Наука, 1971, с. 306-310.
t1
U|
/
aff
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для идентификации объекта управления | 1982 |
|
SU1027698A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Комплексное устройство обнаружения воздушных объектов | 2023 |
|
RU2816190C1 |
| Устройство передачи и приема информации | 1988 |
|
SU1541648A1 |
| Комплексное устройство обнаружения воздушных объектов | 2024 |
|
RU2835495C1 |
| Устройство для регулирования натяжения материала в многосекционной непрерывно-поточной линии | 1988 |
|
SU1664712A1 |
| Устройство для передачи и приема информации | 1986 |
|
SU1399797A1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| Устройство для передачи и приема информации | 1987 |
|
SU1449989A1 |
| Устройство для идентификациилиНЕйНОгО Об'ЕКТА | 1979 |
|
SU847276A1 |