(54) УСТРОЙСТВО ДЛЯ ИЛКНТИФИКАЦИИ ЛИНЕЙНОГО OFI-EKTA
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство для идентификации объекта управления | 1975 |
|
SU602916A1 |
| Устройство для индентификации линейного объекта | 1978 |
|
SU744455A1 |
| Самонастраивающаяся система регулирования | 1969 |
|
SU530657A3 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Устройство для компенсации нелинейности объекта типа "люфт | 1983 |
|
SU1108387A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1992 |
|
RU2034695C1 |
| Устройство для идентификации | 1982 |
|
SU1038924A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
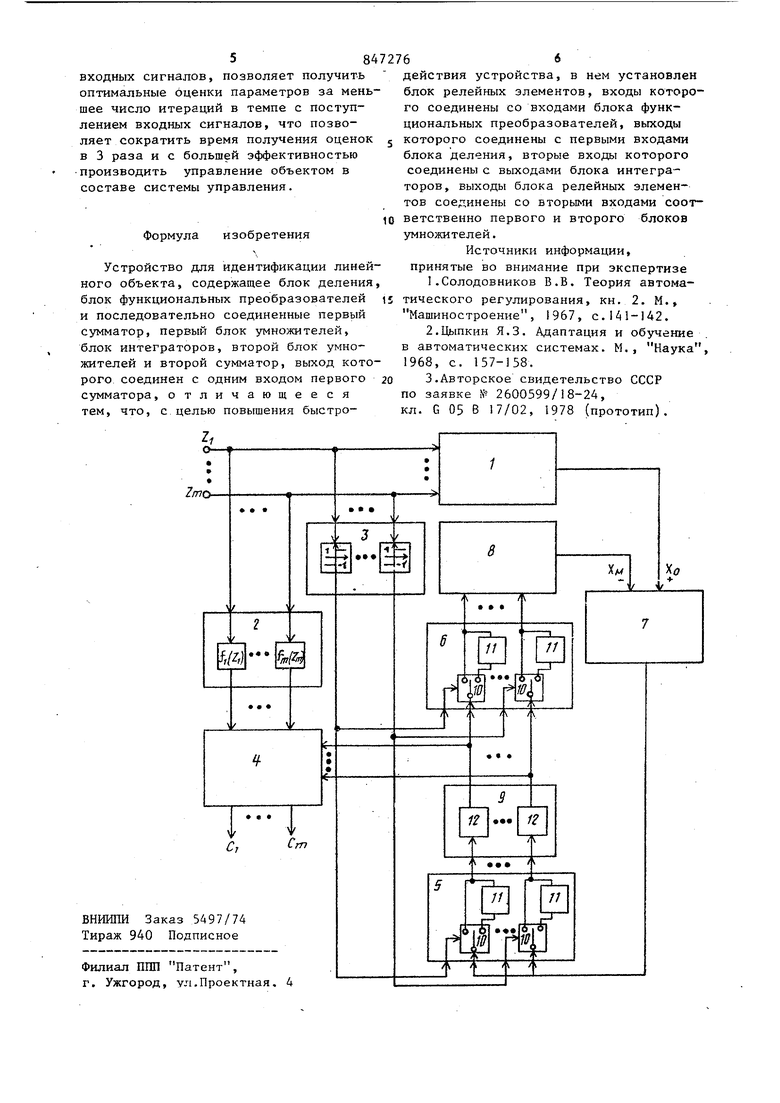
Изобретение относится к идентификации линейных объектов и может быть использовано при определении динамических характеристик в процессе испытаний различного класса линейных объектов. Известно устройство для идентификации линейных объектов, содержащее последовательно соединенные измеритель рассогласования, блок формирова ния функционала настройки модели, блок умножителей, блок функциональных преобразователей, блок интеграторов и настраиваемую модель, состоящую из блока умножения и сумматора, выход которого соединен с одни из входов измерителя рассогласования , второй вход модели соединен .через, блок масштабирующих коэффициен тов со вторыми входами блока умножителей С 13 Известно также устройство для иде тификации линейного объекта содержащее последовательно соединенные первый блок умножителей, блок интегрирования, второй блок умножителей, первый сумматор, второй сумматор и блок деления,выход которого соединен с первыми входами первого блока умножителей, вторые входы которого через последовательно соединенные блок квадраторов и третий .сумматор соединены со вторым входом блока деления С 2. Наиболее близким по технической сущности к предлагаемому является устройство для идентификации линейного объекта, содержащее блок деления, блок функциональных преобразователей и последовательно соединенные первый сумматор, .первый блок умножителей, блок интеграторов, второй блок умножителей и второй сумматор, выход которого соединен с одним входам первого сумматора С З. Недостатком известных устройств является низкое быстродействие. 38 Цель изобретения - повышение быстродействия устройства. Поставленная цель достигается тем, что в устройстве установлен блок релейных элементов, входы которого соединены со входами блока функциональных преобразователей, выходы кото рого соединены с первыми входами блока деления, вторые входы которого соединены с выходами блока интеграторов, выходы блока релейных элементов соединены со вторыми входами соот ветственно первого и второго блоков умножителей. Идентификацию исследуемого объекта проводят по формулам 2.l Sign2 J.s;gnZ....,xslgnZ (1) e4nl-(y,W-& V 2LW)z4nl;;; (2) - ТГ„-1. A)W) unj-, in , Процесс идентификации по указанны формулам повьпцает быстродействие предлагаемого устройства, так как экБиаотеициальные линии квадратичного показателя качества при каждой итерации представляются концентрическими окружностями (если рассматри вать плоскость двух параметров) и не требует получения априорной информации об объекте в процессе решения задачи идентификации. На чертеже представлена блок-схема устройства. Устройство содержит объект 1 иден тификации, блок 2 функциональныгс пре образователей, блок 3 релейных элементов , блок 4 деления, первый и вто рой блоки 5,6 умножителей, первый и второй сумматоры 7 и 8, блок 9 интеграторов, переключатель 10, инверторы 1 1 интеграторы 12, Z- - входны сигналы объекта 1 идентификации. С; искомые параметры, XQ- выходной сигнал объекта I идентификации, х.. выходной сигнал модели, состоящей из блока 6 умножителей и сумматора 8 (Z ) - функциональные преобразований, осуществленные в блоке 2 функ циональных преобразователей, В данном случае функциональные преобразования f(Z- ) , реализуемые в блоке 2 функциональных преобразователей, имеют вид операции выделени модуля, которая для каждого из преОбразуемых сигналов записывается в виде ,., te,l,i,i (4) Нг ,1.|, где 1 и выбирается переменным в зависимости от величины сигнала . Сумматор 7 - сумматор с масштабированием входных сигналов, Входные сигналы (фазовые координаты) 2 объекта 1 идентификации через блок 2 функциональных преобразователей, входы которого соединены со входами блока 3 релейш к элементов и входами объекта 1 идентификации, поступают на первые входы блока 4 деления, выходы блока 3 релейных элементов соединены с первыми входами блоков 5 и 6 y шoжитeлeй. Сумматор 7, первый вход которого соединен с выходом объекта Г идентификации, а второй, вычитающий - с выходом сумматора 8, через вторые входы первого блока 5 умножителей соединен со входамЬ блока 9 интеграторов, выходы которого через вторые входы второго блока 6 умножителей соединены со входами сумматора 8 и со вторыми входами блока 4 деления, на выходах которого получают искомые параметры С; . Устройство работает следующим образом, С выходов блока 3 релейных элементов единичные сигналы, имеющие знаки соответствующих входных сигналов поступают на первые входы бло5 и 6 умножителей. На вторые входы блока 5- умножителей поступает разность между выходным сигналом объекта 1 идентификации и модели (состоящей из блока 6 умножителей и сз мматора 8) , полученная на сумматоре 7. Результат умножения поступает на входы блока 9 интеграторов. С выходов блока 9 интеграторов сигналы поступают на блок 4 деления, где каждый делится на соответствующий модуль входного сигнала, поступающий из блока 2 функциональных преобразоватепей, в результате на выходах блока 4 деления получают оценки очередного шага вычислений С , Введение замены входных сигналов модели единичными со знаками, соответствующими знакам входных сигналов, .преобразование сигналов оценок в бло,ке деления на модули соответствующих входных сигналов, позволяет получить оптимальные оценки параметров за мень шее число итераций в темпе с поступлением входных сигналов, что позволяет сократить время получения оценок в 3 раза и с большей эффективностью производить управление объектом в составе системы управления. Формула изобретения Устройство для идентификации линей ного объекта, содержащее блок деления блок функциональных преобразователей и последовательно соединенные первый сумматор, первый блок умножителей, блок интеграторов, второй блок умножителей и второй сумматор, выход кото рого соединен с одним входом первого сумматора, отличающееся тем, что, с целью повышения быстродействия устройства, в нем установлен блок релейных элементов, входы которого соединены со входами блока функциональных преобразователей, выходы которого соединены с первыми входами блока деления, вторые входы которого соединены с выходами блока интеграторов, выходы блока релейных элементов соединены со вторыми входами соответственно первого и второго блоков умножителей. Источники информации, принятые во внимание при экспертизе 1.Солодовников В.В. Теория автоматического регулирования, кн. 2. М., Машиностроение, 1967, с. I-) 1-142. 2.ЦЫПКИН Я.З. Адаптация и обучение . Б автоматических системах. М., Наука, 1968, с. 157-158. 3.Авторское свидетельство СССР по заявке № 2600599/18-24, л. G 05 В 17/02, 1978 (прототип).
