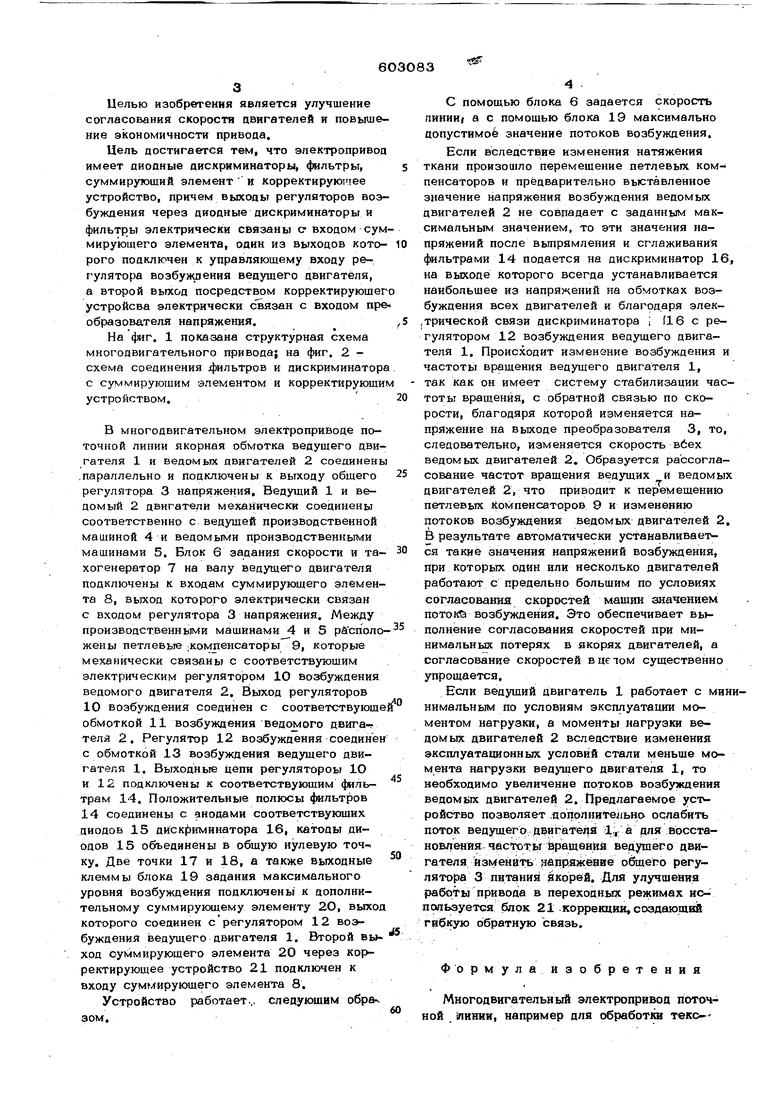
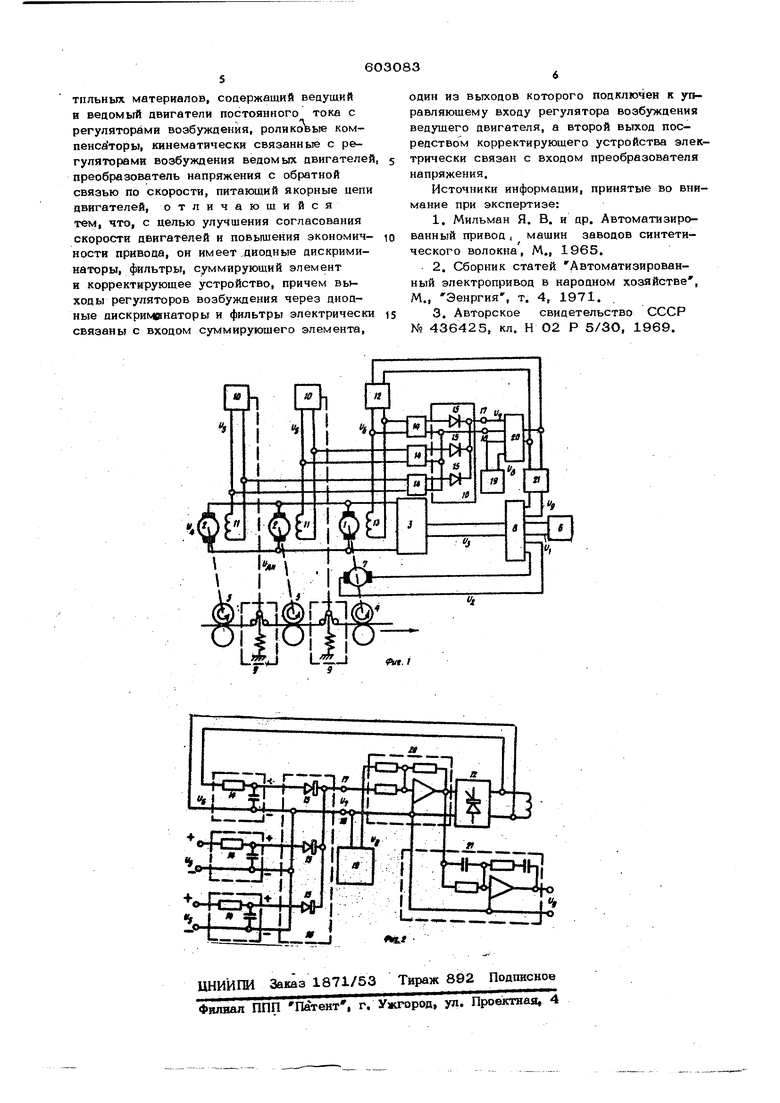
Целью изобретения является улучшение согласования скорости двигателей и повыше ние экономичности привода. Цель достигается тем, что электроприво имеет диодные дискриминаторы, (|я{льтры, суммирующий элемент и корректирующее устройство, причем выходы регуляторов воз буждения через диодные дискриминаторы и фильтры электрически связаны с- входом су мирующего элемента, один из выходов кото рого подключен к управляющему входу ре-, гулятора возбуждения ведущего двигателя, а второй вьпсод посредством корректирующе устройсва электрически сЪязан с входом пр образователя напряжения, На фиг, 1 показана структурная схема многодвигательного привода; на фиг, 2 схема соединения 41ильтров и дискриминатор с суммирующим элементом и корректирующ устройством, В многодвигательном электроприводе поточной линии якорная обмотка ведущего дви гателя 1 и ведомых двигателей 2 соединен .параллельно и подключены к выходу общего регулятора 3 напряжения. Ведущий 1 и ведомый 2 двигатели механически соединены соответственно с ведущей производственной машиной 4 и ведомыми производственными машинами 5, Блок 6 задания скорости и та хогенератор 7 иа валу ведущего двигателя подключены к входам суммирующего элемен та 8, выход которого электрически связан с входом регулятора 3 напряжения, .Между производственными машинами 4 и 5 рагсполо жены петлевые ;компенсаторы9, которые механически связаны с соответствующим электрическим регулятором 10 возбуждения ведомого двигателя 2, Выход регуляторов 10 возбуждения соединен с соответствующ обмоткой 11 возбуждения ведомого двигателя 2, Регулятор 12 возбуждения соедине с обмоткой 13 возбуждения ведущего двигателя 1, Выходные цепи регулятороы Ю и 12 подключены к соответствующим фильтрам 14, Положительные полюсы фильтров 14 соединены с анодами соответствующих диодов 15 дискриминатора 16, катоды диодов 15 объединены в общую нулевую точ- ку. Две точки 17 и 18, а также выходные клеммы блока 19 задания максимального уровня возбуждения подключены к дополнительному суммирующему элементу 20, выхо которого соединен с регулятором 12 возбуждения ведуп1его двигателя 1, Второй выход суммирующего элемента 20 через корректирующее устройство 21 подключен к входу суммирующего элемента 8, Устройство работает... следующим обра зом. С помощью блока 6 задается скорость пинии( а с помощью блока 19 максимально допустимое значение потоков возбуждения. Если вследствие изменения натяжения ткани произошло перемещение петлевых компенсаторов и предварительно вьставленное значение напряжения возбуждения ведомьк двигателей 2 не совпадает с заданным максимальным значением, то эти значения напряжений после выпрямления и сглаживания 4мльтрами 14 подается на дискриминатор 16, на выходе которого всегда устанавливается наибольшее из напряжений на обмотках возбуждения всех двигателей и благодаря элек,трической связи дискриминатора i 16с регулятором 12 возбуждения ведущего двигателя 1, Происходит изменение возбуждения и частоты вращения ведущего двигателя 1, так как он имеет систему стабилизации частоты вращения, с обратной связью по скорости, благодяря которой изменяется напряжение на вькоде преобразователя 3, то, следовательно, изменяется скорость вбех ведомых двигателей 2, Образуется рассогласование частот вращения ведущих и ведомых двигателей 2, что приводит к перемещению петлевьк компенсаторов 9 и изменению потоков возбуждения ведомых двигателей 2, В результате автоматически устанавливает ся такие значения напряжений возбуждения, при которых один или несколько двигателей работают с предельно большим по условиях согласования скоростей машин значением потоки возбуждения. Это обеспечивает ъыполнение согласования скоростей при минимальных потерях в якорях двигателей, а согласование скоростей в цепом существенно упрощается. Если ведущий двигатель 1 работает с мининимальным по условиям эксплуатации моментом нагрузки, а моменты нагрузки ведомых двигателей 2 вследствие изменения эксплуатационных условий стали меньше момента нагрузки вед тцего двигателя 1, то необходимо увеличение потоков возбуждения ведомых двигателей 2, Предлагаемое устройство позволяет .доиолии1«льн;о ослабить поток ведущего двигатет а 1, а для восстаНОВЛШ1ЙЯ час1х)ты Врашения ведущего двигателя изменить напряжение общего регулятора 3 питания якорей. Для улучшения работы привода в переходных режимах используется блок 21 .коррекции, создающий гибкую обратную связь. Формулаизобретения Многодвигательный электропривод поточной 1ЛИНИИ, например для обработки текс
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод поточной линии | 1977 |
|
SU858196A1 |
| Многодвигательный электропривод постоянногоТОКА для пОТОчНОй лиНии C пЕРЕМАТыВАю-щиМ МЕХАНизМОМ | 1979 |
|
SU851721A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОТОЧНОЙ | 1973 |
|
SU373824A1 |
| Многодвигательный электропривод постоянного тока для поточной линии с перематывающим механизмом | 1983 |
|
SU1160520A1 |
| Многодвигательный привод конвейерных систем | 1974 |
|
SU656930A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1996 |
|
RU2111158C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1997 |
|
RU2136570C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ АВТОСАМОСВАЛА | 2021 |
|
RU2757093C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
