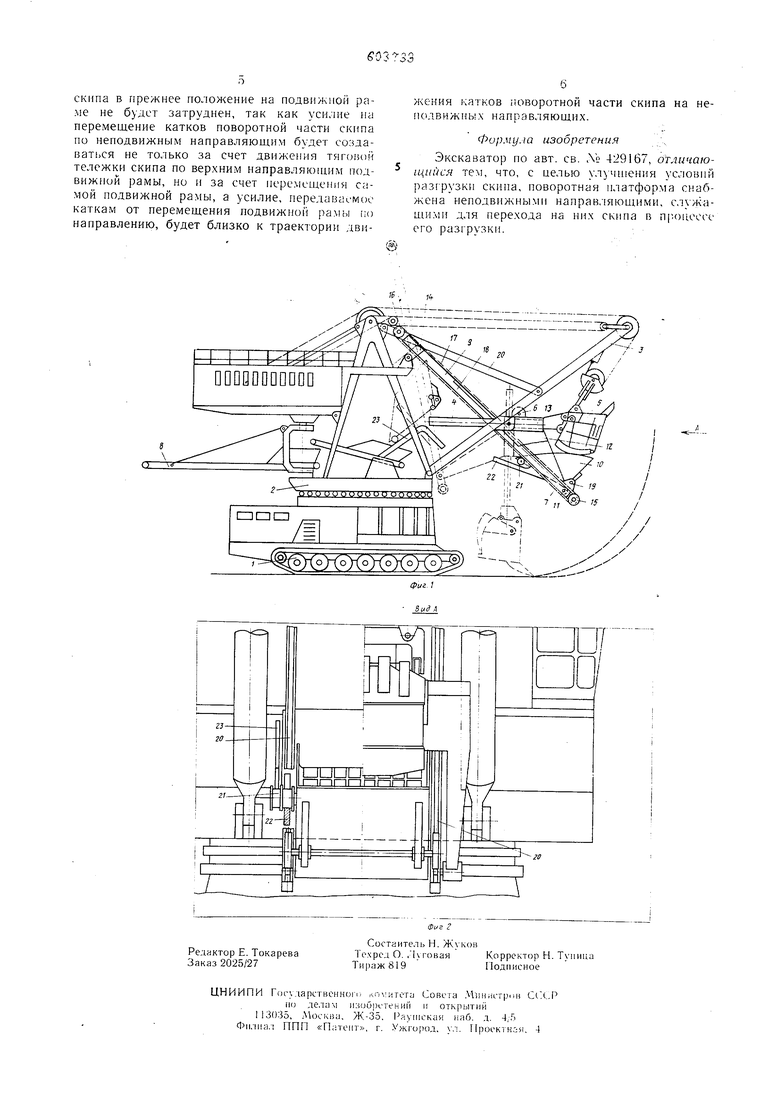
Рабочее оборудование состоит из ст|)(и,1 3, шарнирно закрепленной на поворотной платформе 2, рукояткн 4, KOBnia Ti. закреплсн.чогп на рукояти, напорного мехапиз 6 и ycrponcTiuj 7 для приема и передачи материала от ковша 5 к разгрузочному конвейеру 8. Устройство 7 выпoлfleнo в виде подвижной рамы 9, по направляющим которой перемещается скин 10. Нижний конец подвижной рамы 9 через щарнир 11 сочленен с кронн1тейном 12, жестко закрепленном на корпусе 13 сед.ювого поднтнпика нанорного механизма б. Верхний конец подвижной рамы 9 установлен с возможностью перемещения в направляющем устройстве 14, закренленпом на платформе 2.
Рама 9 и скип 10 кинематически связаны между собой системой блоков 14, 15, 16 и канатов 17 и 18 так, что при перемещении рамы 9 скин 10, снабженный тяговой тележкой 19, перемещается вдоль нее по верхним направляющим 20, при этом катки 21 поворотной части скипа движутся по подвижным паправляюн1им 22. На новоротной платформе 2 над местом загрузки разгрузочного конвейера установлены ненодвижные нанравляющие 23, на которые в конце хода скипа переходят катки 21 поворотной части скина. Катки выпо.чнены с двумя рабочими поверхностями качения, внещними и внутренними.
Экскаватор работает следующи.м образом. Рабочее движение экскаватора на зачерпывание материала осуществляется за счет нодъема ковща подъемным канатом и перемещения его к забою за счет выдвижения рукояткн 4 нанорным механиз.мом б.
После окончания рабочего движения загруженный KOBHJ должен быть поднят в определенное исходное положение для разгрузки. Ес.П1 ковщ зано.иштся экскавируе.мым материало.м eHj.e до достижения своего верхнего исходного положении, то двиЖе1И1е подье.ма ковпш необходимо продолжить, отводя ковщ от забоя. Одновременно с подъемом ковща в верхпее исходное положение (рабочее движеьп1с кови1а) подвижная рама 9 со скипом 10 перемещается вперед благодаря щарпирному соедппению 11 н 1жнего конца ра.мы с крони тейном 12 седлового нодщипника напорного .механизма б. При этом тяговая тележка скипа 19 движется но верхним направляющим 20 в свое крайнее ноложение (для загрузки экскавируемым материалом) за счет кинематической связи с рамой, выполненной в виле cuciuwb блоков и канатов. При достижении ковщом верхнего исходного положения неремещением рукоятки 4 назад он отводится в крайнее заднее положение, устанавливаясь в зоне перегрузки г кскавируемого материала в скин. При достижении ковщом зоны нерегрузки в скин открывается днище KOBHia, и горная масса иостененно, но мере открывания днища, перегружается в скин. После разгрузки ковща он опускается вниз для следующего чернания (холостой ход), при этом седловой нодщннник нанорного механизма с рукоятью ковща 4 поворачивается вокруг своей оси, перемещая подвижную со скипом 10 назад нрн помощи закрепленных
на сел.ювол н()днщп:п е крощптейно 12, нриче 1 скип 15 это lipiMH движется назад в свое к| айнее заднее со.ижеьнк на разгрузку на разгрузочн1)1Й конвейе|).
В нача,1е хода (нгусклния к)Вша 5 подвижная рама перемени1ется к новоротной платформе вмеете со скнпо.м, при этом его тяговая тележка 19 неремещается по верхним направляющим 20 подвижной рамы, а катки 21 поворотной части скина неремещаются своими внутренними новерхностями качения за счет перемещения тяговой тележки но нодвижным нанравляюцд.им 22. При дальнейшем опускании KOBHia и пере.мен1.ении нодвижной рамы рабочие поверхности подвижных направляющих 22 совпадают в зоне неремещення катков 21 с рабочими поверхностями неподвижных направЛЯЮ1ЦПХ 23.
При этом положении подвижных и неподвижных нанрав.ляющих происходит переход ка:ков 21 с подвижных направляющих 22 на 0 неподвижные 23, разнесенпые по щирине относительно подвижных. При таком нереходе катки 21 катятся но подвижным направляющим 22 своими внутренними рабочими поверхностями качения, а по ненодвижны.м направляющим 23 - внещними рабочими поверхностями качения. В конце хода опускания ковща и перемещения подвижной рамы, подвижные направляющие 22 утапливаются своими рабочими новерхностями ниже рабочих поверхностей неподвижных направляюпаих 23 и катки 21 поворотной части скина перемещаются только на пеподвижных направляющих за счет перемен1ения тяговой тележки екипа 19 и подвижной рамы 9.
Рабочпе поверхности неподвижных направляющих имеют профиль, обеспечивающий на соответствующих участках нереход на них катков 21 с нодвижных направляющих на рациональную с точки зрения быструю и полную |)азгрузку скипа траекторию опрокидывания поворотной части скина. Возврат скина в исд0 ходное положение для погрузки происходит в обратной последовательности при подъеме ковща в верхнее исходное положение (рабочее движение ковща). При этом возврат поворотной части скина в положение, предществующее его опрокидыванню на неподвижных нанравляю- s дих, будет осущсств.чяться за счет суммарного движения тяговых тележек 19 и са.мой подвижной рамы 9, создающих усилие но нанравлению близкому к траектории движения катков 21 на ненодвнжьн кх направляющпх.
Такое выполнение копстр -книн паправляюHUIX для перемеп1епия поворот Н)й частп скипа HoiiijiiHaeT надежность )аботы экскаватора и увеличивает его производительность за счет того, что пос.те перехода каткой ново ютной части скппа на нег1одвижн1,1е направляющие, 55 поворотная час1ь скипа благодаря конфигурапли этих нанравляющпх yro.i опрокидывания, необходимый д,1я быстрой и no.iHlii |)аз рузки горной масс-,.
При этом yiO.i 011рокиды1 апия новоротной части скипа 1.ч носите.MI,.но подни/кпои рамы мо60
жет 6i)irb бо,ее 90 и, поворотной части
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСКАВАТОР | 1971 |
|
SU429167A1 |
| Тележечный конвейер | 1981 |
|
SU1008102A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1967 |
|
SU192087A1 |
| Экскаватор | 1975 |
|
SU619602A1 |
| Канатный зажим для проволочно-канатной дороги | 1926 |
|
SU51320A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1969 |
|
SU239113A1 |
| ЭКСКАВАТОР для РАЗРАБОТКИ СКАЛЬНЫХ ПОРОД | 1972 |
|
SU324346A1 |
| Карьерная машина для разработки взорванных скальных пород | 1972 |
|
SU662718A2 |
| Стекерный экскаватор-лопата | 1947 |
|
SU79777A1 |
| Тележечный конвейер | 1983 |
|
SU1121209A1 |
