7 1 5 в 22 3 20 J9 21
гчзобпстенме относится к т) портной ivxsinKC, и i-iMCHHO к строй(;твам ;и1я трапч;Ю П 110 -3;ji-pv3O4noro обсл ужипания тс- нологнческого оборудования.
Излестен тележечный конвейер, вклюЧс1К)111.ий rpvaoHyK) тележку, перемещаемую тяговым органом к меету загрузки и разгрузки, становлопиый яа раме грузовой тележки fioHopoTiibifi ковш, механизм osipoK4,u iHaHViK кпнша и выдвижные уиоры, разме:ц(;ни1:,г местах разгрузки ковша 1.
Ланмы; геложечпый конвейер имеет сложiibiii MexaiiiiiK опрокидывания , так как н мостах разгрузки тележки одновремеямо л;);|жны срабатывать механизмы стонорепия тележки относительно бункеров д.:Я те.хно.аогического оборудоЕзания и механизм шсФиксации ;риводиого блока. Paccoivia i-o;;:; )M6f) этих механизме; ; нриi;::ini к тягоног; органа, .аюмке ;.crvop; или кхмачка на месте разгрузки, м .ла;1к: с-инхр ИНОЙ работы этих механиз. с,;ожна и iipis 6(), количестве то;uK г)азгрузк1| т)удоечка.
Наиболее близким к изобретсчжю по тех lirivecKOH суппюсти и достигаемому результ:; I - яв, т(;ежечнлй конвейер, вклю1:а1(;;иий rpv3oBVio тележк,, иеремеидаемую по пути : МСС1Л загрузки и иазгрузки
чОгаНОМ, С1)ЯЗПИ1-ЫМ с 11ПИиоД1 ЫЧ
BBino шеи :(;диружин(Д)ным к )аме 1рузовой ТС,:.,ЖКИ
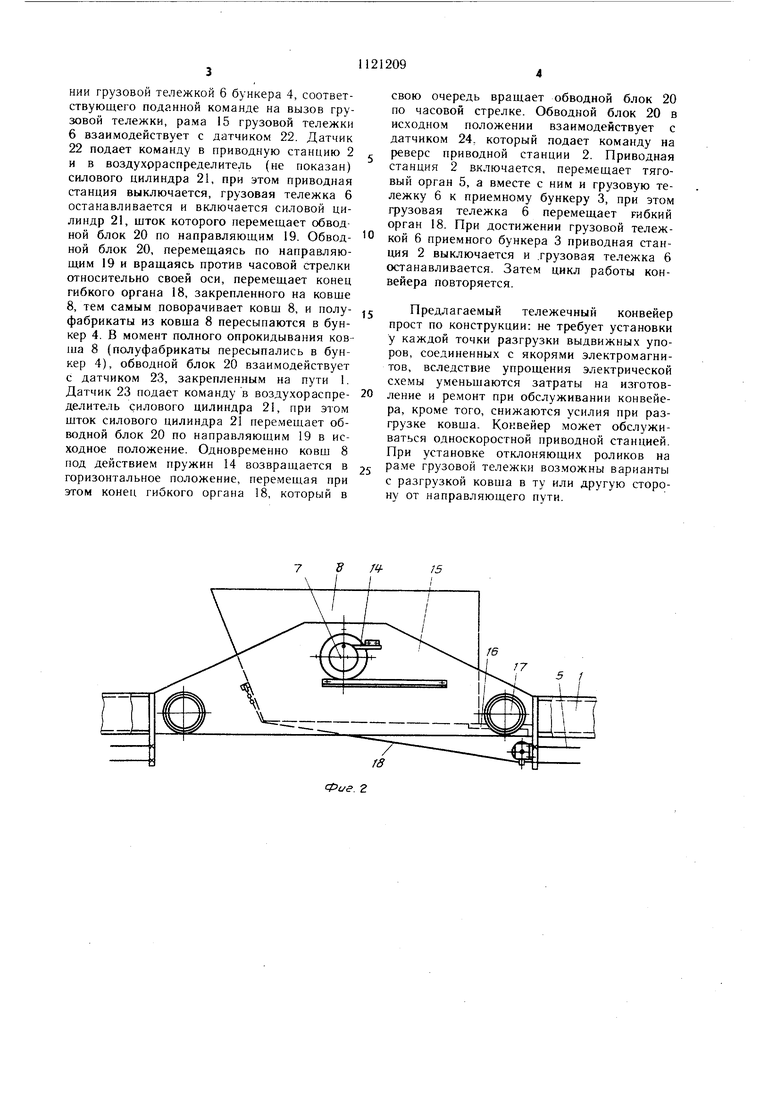
ibi ifjiir. I изображен те,ложечный кон.чсйер, обаьчй вид; на ijinr. 2грузовая
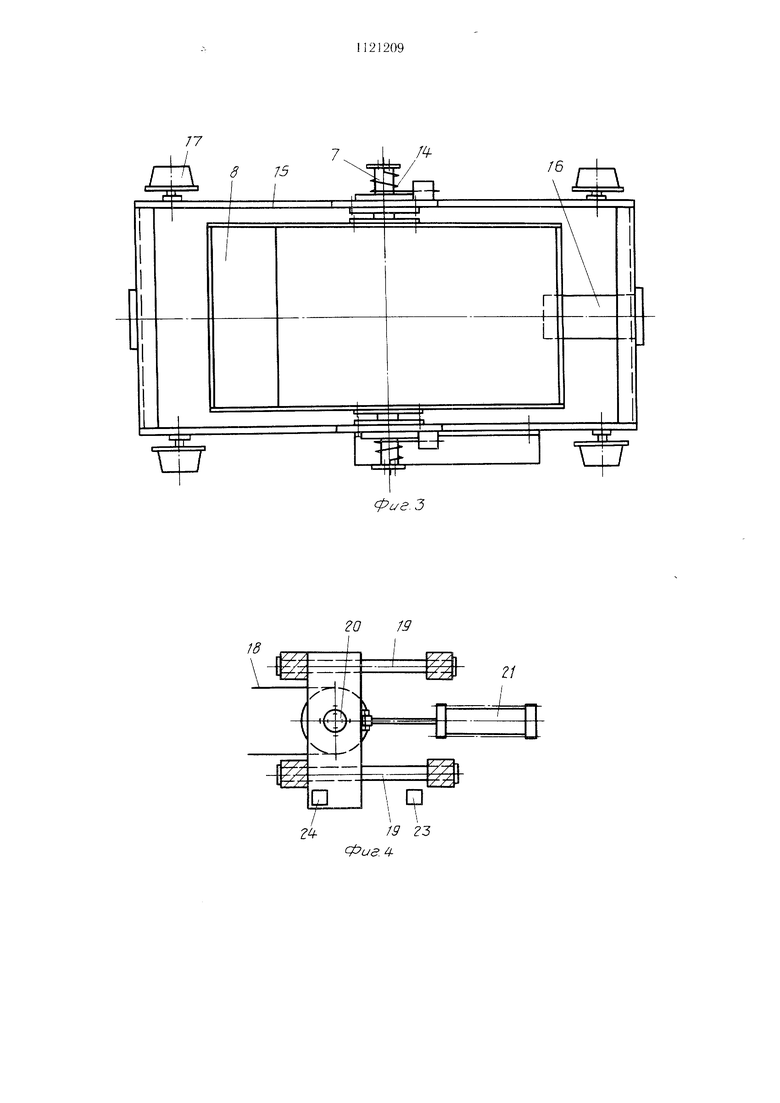
тс.КЖк;:, р,ид с.нереди; ;а , 3 то же, вид c;upxy; на фиг. 4 ыеха: изм опрокидывания коына, йид сверху; на фиг, 5 rpy30B,;if.i телгжка в зоне разгрузки, на iexai H3M опрокидывания ковша, вид )сди,
Телсжечный коь;всйер содержит ПУТВ 1, одиоск(; 1ост; ук) ириводную 2, приемный бункеГ) 3, буикерв 4 для технол лд1ческо|-о оборудования, тяговый орган 5 грузовой те.ежки (. несушей новоротный на опорах 7 ковш 8, приводной блок 9, закреп,.ieiHn,iK на нрн1ю..чно.м валу 10, нриче.м прикод1;ой б;к)к 9 содержит жестко :акрег1ленiCi.iii на в.а,1 10 б.кж i 1 и своб();1Н{; закренле И11 Й на ва, () блок 12, обводной блок 1.) и механизм о,ирокидв1вания .KOBH.ia. Ковш 8 снабжен иру,жи11; ми 4. .закренле1и-1ыми одиим конн.оч на кови1е, ..-фугим концом на раме 15 грузо14ой тележки 6. Па раме 15 р зглк:й те,1ежчн ;-станов,. оиорный кронинейн , К1:ви:;; н и )олики 17, обкатв1ваю иис15; i:- Лти i. П«д дсйствием пружин 14 КОНИ к находи п ; о)ИЗ(итгалвном нолож; : И. ДАгХаиизУ: (::;рксдь ка НИИ KOBHJa со);;;аи 18, закрепленный на {;а-;с ,) i .-з) тележки, а другим
h( Ч( ;СЗ i О. Bii Ж i i (Й В Яа П ра ВЛ ЯЮН1,И X
19 обволпой 6..iiiK 2i на ковнк 8, Иодвижч 1Й )бг()лной 6:iOK 20 соединен со штоком ,ого ,И1.-ра 21, ;ричем пток сило ; -;; г г..-|И1Г1ра находиия к выдвинутом по, южегдш. Путь 1 снабжен датчиками 22, г i .;;сн-;ыми з местах разгрузки KOBiua (Л1ОЙ 1г, и взаимодействующими с рамой 15 пу.овой тележки. Направляющий содерИч|Г также датчики 23 и 24, з.аимодеис ByKHHite с подвижным блоком 20.
1е.-:ежоч ;,,|й ко.мвейер работает еледуюшим (1бра:-;ом.
Грузовая тележка 6 загружается сверху полуфабрикатами из приемного бункера 3. При сниже1|Ии ровня нолуфабрикатов в ,1К)бом и бункеров 4 {датчики уровня полуфабриха IOB ic .1каза1н,)) подается команда в |;риводяук) kTaiiiiiiK) 2, нос,1едчяя включа(тся, }1ялин;нг 1 ран1аться жестко закреп,)Ьый на в.ал;/ К) блок И приводного блока , котог1 : й, вра;цаясв, неремешает 1ибкий тяговый оргии 5, причем гибкий тяго(ый opiaii 5 гри сноем движении перемеш,ает 1рузову о те.сжк) 6 в направлении бунке)а 4 Одновременно грузовая тележка 6 при своем движ(М1ии -№ремеп1ает гибкий орган 8, закре;|, н блоке 12 приводлого блока 9 и в обв{.чмом блоке 20 механиз.м, ол;рокидь1ва гия ков;на. При достижеНИИ грузовой тележкой 6 бункера 4, соответствующего поданной команде на вызов грузовой тележки, рама 15 грузовой тележки 6 взаимодействует с датчиком 22. Датчик 22 подает команду в приводную станцию 2 и в воздухораспределитель (не показан) силового цилиндра 21, при этом приводная станция выключается, грузовая тележка 6 останавливается и включается силовой цилиндр 21, шток которого перемещает обводной блок 20 по направляющим 19. Обводной блок 20, перемещаясь по направляющим 19 и вращаясь против часовой стрелки относительно своей оси, перемещает конец гибкого органа 18, закрепленного на ковше 8, тем самым поворачивает ковщ 8, и полуфабрикаты из ковша 8 пересыпаются в бункер 4. В момент полного опрокидывания ковща 8 (полуфабрикаты пересыпались в бункер 4), обводной блок 20 взаимодействует с датчиком 23, закрепленным на пути 1. Датчик 23 подает команду в воздухораспределитель силового цилиндра 21, при этом шток силового цилиндра 21 перемещает обводной блок 20 по направляющим 19 в исходное положение. Одновременно ковш 8 под действием пружин 14 возвращается в горизонтальное положение, перемещая при этом гибкого органа 18, который в СВОЮ очередь вращает обводной блок 20 по часовой стрелке. Обводной блок 20 в исходном положении взаимодействует с датчиком 24. который подает команду на реверс приводной станции 2. Приводная станция 2 включается, перемещает тяговый орган 5, а вместе с ним и грузовую тележку 6 к приемному бункеру 3, при этом грузовая тележка б перемещает гибкий орган 18. При достижении грузовой тележкой 6 приемного бункера 3 приводная станция 2 выключается и .грузовая тележка 6 останавливается. Затем цикл работы конвейера повторяется. Предлагаемый тележечный конвейер прост по конструкции: не требует установки у каждой точки разгрузки выдвижных упоров, соединенных с якорями электромагнитов, вследствие упрощения электрической схемы уменьшаются затраты на изготовление и ремонт при обслуживании конвейера, кроме того, снижаются усилия при разгрузке ковша. Конвейер может обслуживаться односкоростной приводной станцией. При установке отклоняющих роликов на раме грузовой тележки воз.можны варианты с разгрузкой ковша в ту или другую сторону от направляющего пути.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1982 |
|
SU1016250A1 |
| Тележечный конвейер | 1981 |
|
SU1008102A1 |
| Тележечный конвейер | 1983 |
|
SU1087432A1 |
| Тележечный конвейер | 1981 |
|
SU982999A1 |
| ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1972 |
|
SU345073A1 |
| Тележечный конвейер | 1975 |
|
SU602424A1 |
| Транспортная система | 1982 |
|
SU1167115A1 |
| Скиповый подъемник | 1983 |
|
SU1126524A1 |
| Тележечный конвейер | 1985 |
|
SU1316934A1 |
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1110693A2 |

ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР, включающий грузовую тележку, перемещаемую по пути к месту загрузки и разгрузки тяговым оргапо.м, связанным с приводным валом, установленный на раме грузовой тележки поворотный ковщ и механизм его опрокидывания, отличающийся тем, что, с целью повышения надежности работы, механизм опрокидывания ковша выполнен в виде гибкого органа, один конец которого соедипьч с рамой тележки, а другой - с ковшом, и двух огибаемых гибким органом блоков, один из которых свободно установлен на приводно.м валу, а другой - на пути посредством направляющих и имеет силовой цилиндр перемещения, причем ковш выполнен подпружиненным к раме грузовой тележки.
7S
Фиг. 2 /
Фаг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 0 |
|
SU345073A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 892999, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
